線性調頻信號高耦合系數條件下的目標跟蹤
2014-01-01 03:18:20王建衛
現代雷達 2014年8期
關鍵詞:方法
黃 強,王建衛
(南京電子技術研究所, 南京210039)
0 引言
線性調頻信號具有諸多優點,例如通過相位調制可以獲得大時寬帶寬積,匹配濾波對多普勒頻移不敏感等[1]。因此,線性調頻信號被廣泛應用于雷達領域。但線性調頻信號經過脈沖壓縮后具有很強的距離多普勒效應,使得距離量測有一定偏差(偏差與徑向速度和耦合系數有關),為后續的目標狀態估計和數據互聯帶來較大的影響。
為了解決這個問題,國內外很多學者采用了測速的方法[2-3],但該方法有很大的局限性,無法在工程中應用。另外純粹數據處理的方法是先不考慮距離耦合的影響,使用Kalman濾波器在有距離偏移的情況下進行濾波,然后根據濾波估計的徑向速度和距離多普勒耦合系數對距離進行修正。該方法在低耦合系數(且耦合系數較小變化)和低速目標情況下是適用的。但在高耦合系數和高速目標情況下,經過該方法修正后的距離依然存在著較大偏差。文獻[4-5]采用帶有徑向速度的擴展卡爾曼濾波(Extend Kalman Filter,EKF)方法,該方法需要具有徑向速度測量量,但在實際情況下很難測得徑向速度。文獻[6-7]中,在極坐標系下濾波,距離維量測中不改變徑向速度帶來的距離走動,在一定程度上改善了距離估計精度。為此本文把該方法推廣到直角坐標系,采用EKF和不敏卡爾曼濾波(Unsented Transformation Kalman Filter,UKF)的方法進行帶距離多普勒耦合距離走動的濾波,最后通過仿真,分析了幾種方法的優缺點,并給出了相應結論。
1 問題的描述
對于線性調頻信號,當目標存在徑向速度時,就會發生多普勒失配現象。也就是匹配濾波器輸出的峰值并非出現在期望的t=0時刻。相反,峰值輸出位置的移動量與多普勒頻移成比例。由于對目標距離的估計是基于該峰值出現的時間,所以多普勒失配將引起測距誤差。相應的距離誤差為
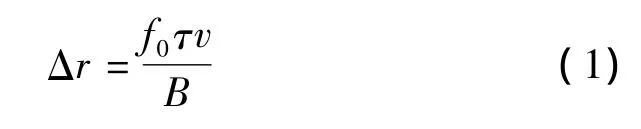
式中:f0為發射信號的中心頻率;τ為脈沖寬度;v為目標徑向速度;B為信號帶寬。從式(1)中可以看出,線性調頻信號多普勒失配引起的測距誤差和中心頻率、脈沖寬度和目標速度成正比,和信號帶寬成反比。定義多普勒耦合系數為

下面給出不同波段雷達距離誤差計算,參見表1。

表1 不同波段雷達距離誤差
從表1可以看出,對于遠距離高速目標,不同頻段造成的距離誤差從百米到十公里量級,差別較大。對于遠程彈道導彈和衛星的運動速度要遠遠大于2 km/s,造成的距離誤差將成倍的增加。如果目標的徑向速度恒定不變,則采用先估計速度再距離修正不會存在太大的問題。但往往軌道目標的運動速度相對于觀測站變化劇烈,采用該方法修正后的距離依然存在著較大偏差。下面以示例說明:圖1為采用STK軟件生成的某高速目標的徑向速度曲線;圖2為采用先估計徑向速度再修正距離誤差的距離精度(假定多普勒耦合系數為2)。
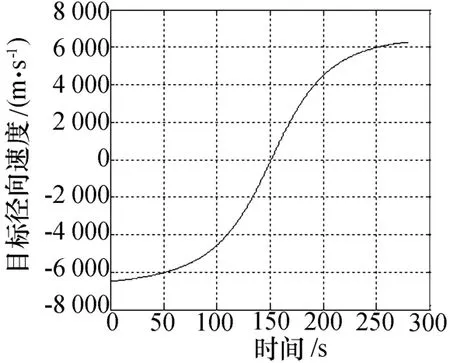
圖1 目標徑向速度隨時間變化曲線
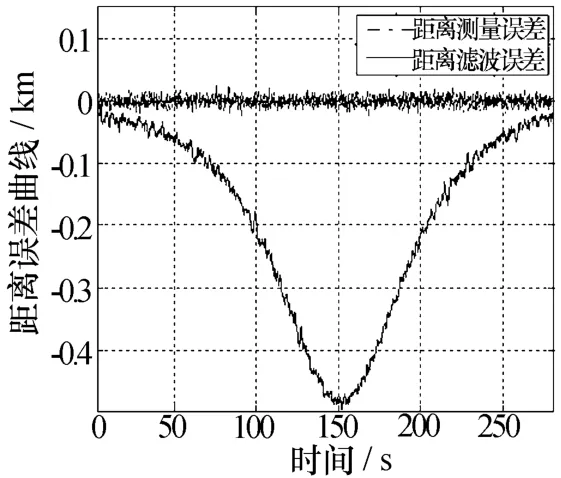
圖2 先估計后修正的距離誤差
從圖2可以看出,在目標徑向速度變化最大時(150 s)修正后的距離誤差最大,達到了近0.5 km。也就是說,對于高速目標和高耦合系數條件下,采用先估計再修正的方法已經不再適用,因此需要采用新方法來解決這個問題。
2 濾波新算法
以往的算法都是在估計出目標徑向速度后修正距離走動誤差,這對較小耦合系數和較低速度目標是適用的,但對高耦合系數和高速目標已不再適用。下面介紹本文的新方法。
2.1 極坐標濾波算法
假定目標在距離維獨立濾波。目標的運動方程如下


式中:coef為耦合系數,可參考式(2);H(k)=[1,coef,0],W(k)為具有協方差R(k)(1×1矩陣)的零均值,白色高斯量測噪聲序列。
從式(4)可以看出,其和常規量測方程唯一差別就是H矩陣中第二項是耦合系數coef,而不是零。濾波方法和常規的線性卡爾曼濾波方法相同,可以參考文獻[8]。
2.2 直角坐標EKF和UKF濾波算法
如果目標的狀態在直角坐標系下描述,就需要采用非線性濾波的方法。下面介紹基于EKF和UKF濾波的算法。目標在直角坐標系下的運動方程可以描述為
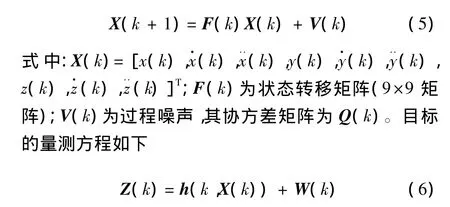
式中:Z(k)=[r(k),a(k),e(k)]T,分別為目標距離、方位和仰角。W(k)為具有協方差R(k)(3×3矩陣)的零均值,白色高斯量測噪聲序列。h(k,X(k))如下式

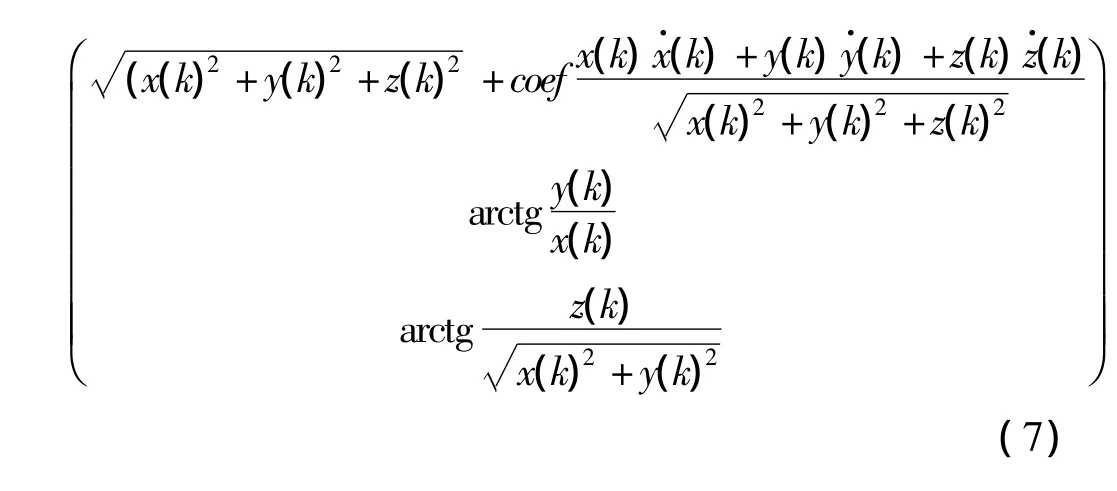
對于EKF濾波算法,其本質上就是把非線性問題線性化(泰勒展開),然后采用線性濾波的方法來進行濾波。對于本文方法的EKF濾波需要計算量測方程式(7)的3×9雅可比矩陣H,其非零元素計算如下
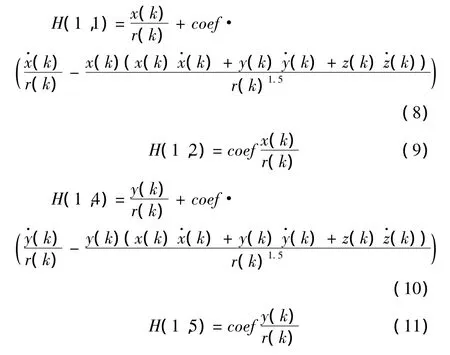
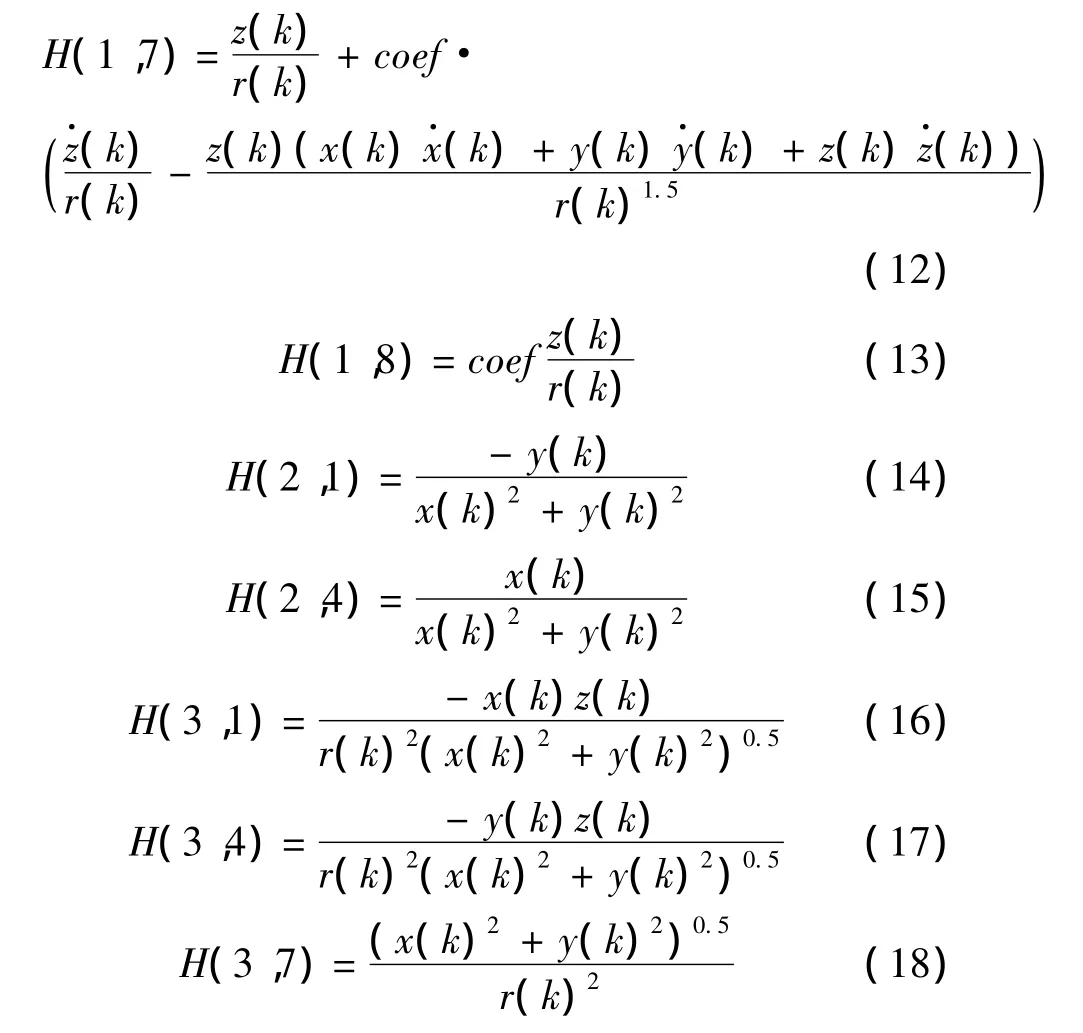
根據預測向量可以計算得到當前時刻的雅可比矩陣H,就可以套用線性濾波方法進行EKF濾波,具體方法可以參考文獻[8]。
而另外一種對付非線性濾波的方法就是UKF,UKF是在不敏變換(Unsented Transformation,UT)基礎上發展起來的,其精度相當于二階泰勒展開的精度,其運算量遠遠大于EKF的運算量。由于其在對付非線性方面的優良特性,使其也在工程中得到了廣泛應用。UKF應用于距離走動的直角坐標系濾波中,改動相對較少,只需要考慮距離量測方程中的多普勒失配帶來的距離誤差項即可(參考式(7)),具體的UKF濾波算法可以參考文獻[8]。
3 仿真分析
下面分別采用本文提出的3種方法進行仿真分析,比較3種方法的濾波精度。目標采用STK軟件產生的彈道導彈數據,其徑向速度曲線參考圖1。假定雷達的測距精度7 m,測角精度3 mrad,采樣數據率為0.1 s,距離走動系數為2,目標運動模型采用singer模型。圖3為極坐標系濾波結果,圖4為直角坐標系EKF濾波結果,圖5為直角坐標系UKF濾波結果。表2為3種濾波方法的精度對比分析結果。
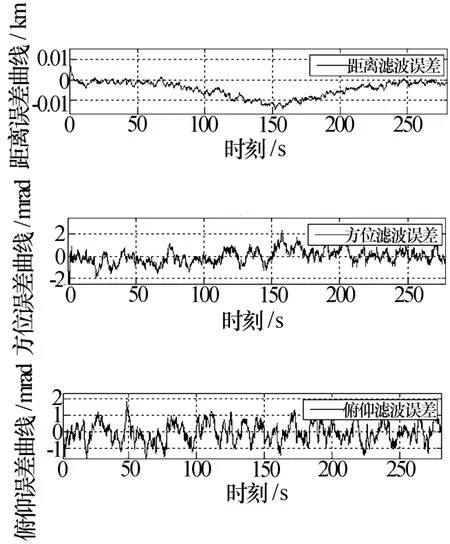
圖3 極坐標系濾波結果
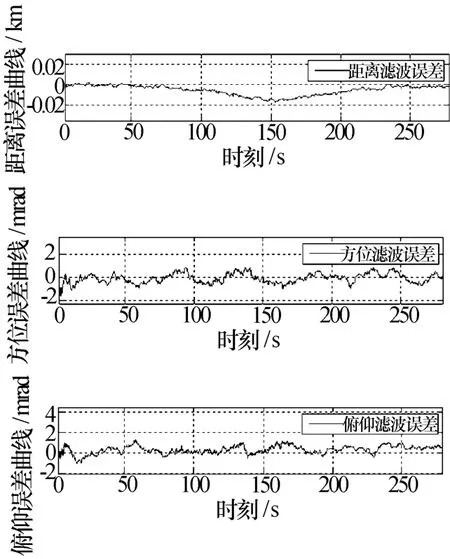
圖4 直角坐標系EKF濾波結果
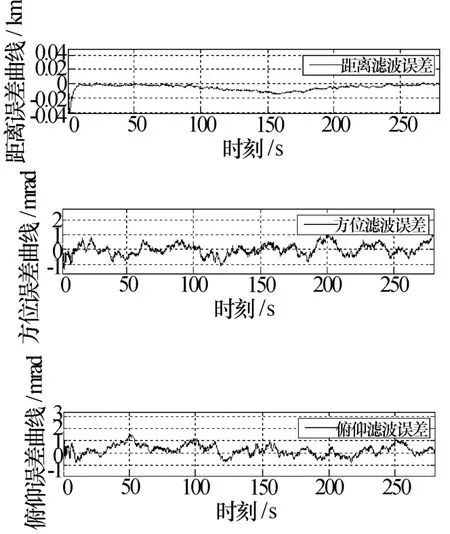
圖5 直角坐標系UKF濾波結果
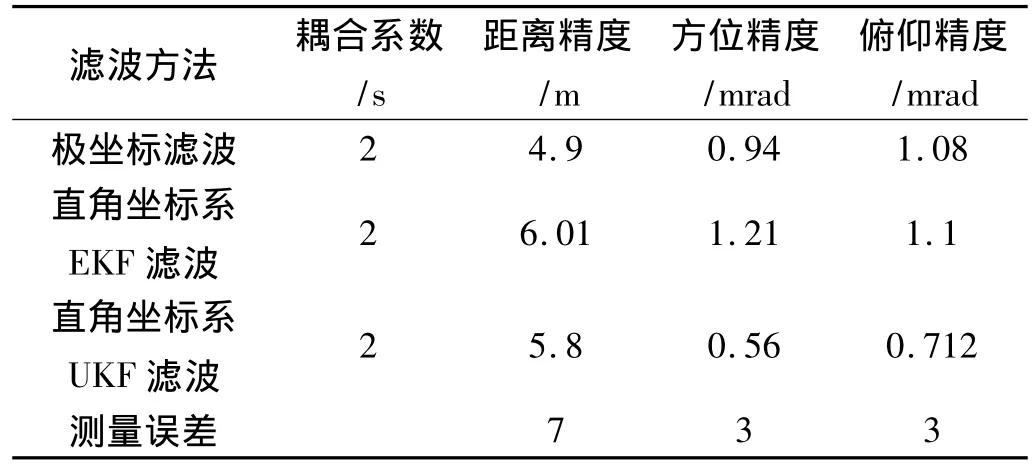
表2 不同濾波方法的濾波精度
從圖3、圖4、圖5和表2可以看出,在考慮高耦合系數條件下極坐標系濾波距離精度最高,其次為UKF,EKF最差;角精度UKF最高,其次為極坐標系三維解耦濾波,EKF最差。主要原因是距離量測方程中加入了耦合誤差項,使得非線性加強,導致了EKF濾波精度的下降,同時也說明了UKF對付非線性濾波問題的有效性。從以上分析可知,如果受限于運算資源并需要保證一定的濾波精度,可以采用極坐標系下三維解耦濾波算法;如果不受運算資源的限制,可以在工程應用中采用UKF濾波算法。
4 結束語
為了解決高頻段雷達在跟蹤高速目標過程中,由于采用線性調頻信號帶來的多普勒失配距離偏差,本文采用不改變距離量測方程,也就是不破壞量測方程的可觀測性,分別給出了極坐標系三維解耦濾波、直角坐標系EKF濾波和直角坐標系UKF濾波算法。最后通過仿真驗證了在高耦合系數條件下本文算法的有效性和相應的適用條件,同時給出了3種濾波方法的精度對比分析結果。在工程實踐中將會遇到各種各樣的問題和不同的需求,因此在工程中采用什么算法還要根據實際情況來定。本文的高耦合系數條件下的濾波算法可供應用時參考。
[1] 向敬成.雷達系統[M].北京:電子工業出版社,2001.Xiang Jingcheng.Radar systems[M].Beijing:Publishing House of Electronics Industry,2001.
[2] 趙 鋒,王雪松,肖順平.高耦合系數條件下徑向速度估計的新方法[J].電子學報,2005,9(33):1571-1575.Zhao Feng,Wang Xuesong,Xiao Shunping.A new method of radial velocity estimation for high coupling coeficient[J].Acta Electronica Sinica,2005,9(33):1571-1575.
[3] Abatzoglou T J,et al.Range,radial velocity,and acceleration MLE using radar LFM pulse train[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(4):107l-1083.
[4] 王建國,何佩琨,龍 騰.徑向速度測量在Kalman濾波中的應用[J].北京理工大學學報,2002,22(2):225-227.Wang Jianguo,He Peikun,Long Teng.Use of radial velocity measurements in Kalman filter[J].Journal of Beijing Institute of Technology,2002,22(2):225-227.
[5] 王建國,龍 騰,何佩琨.一種線性調頻波形下的目標跟蹤算法[J].現代雷達,2003,2(25):26-29.Wang Jianguo,Long Teng,He Peikun.A target tracking algorithm with LFM waveforms[J].Morden Radar,2003,2(25):26-29.
[6] Fitzgerald R J.Effect of range-Doppler coupling on chirp radar tracking accuracy[J].IEEE Transactions on Aerospace and Electronic Systems,1974,10(4):528-532.
[7] Wong W.Blair W D.Steady state tracking with LFM waveforms[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(2):701-709.
[8] 何 友,修建娟,張晶煒,等.雷達數據處理及應用[M].北京:電子工業出版社,2006.He You,Xiu Jianjuan,Zhang Jingwei,et al.Radar data processing with applications[M].Beijing:Publishing House of Electronics Industry,2006.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56