基于VxWorks的多陣面雷達控制系統的設計和實現
2014-01-01 03:18:20王益民
現代雷達 2014年8期
袁 志,王益民
(南京電子技術研究所, 南京210039)
0 引言
大型遠程警戒雷達天線由四個天線陣面組成(以下用A、B、C和D分別代表四個陣面的陣面號),每個陣面的水平掃描范圍為90°,通過不同陣面的順序切換,實現360°的全方位水平掃描[1-2],雷達控制系統只有一套控制和定時,四個陣面采用統一控制的方式,不能同時控制多個陣面實現多陣面同時工作,只能完成單一的環掃方式。
隨著雷達技術的不斷發展,新型雷達天線陣面采用了數字陣設計,數字陣具有高信雜比、快速自適應零點控制和更有效的時間、能量管理等優點。采用新體制對雷達各系統也提出了新的研制需求,其中數字陣控制系統最主要的要求是能夠對每個陣面獨立控制,可以讓多個陣面獨立工作或者某幾個陣面同時工作,實現靈活的掃描方式。獨立工作指控制單一陣面工作或者控制多陣面輪流工作(即實現多陣面環掃的功能),這種方式同一時間段內只有一個陣面在工作。同時工作指的是任意兩個或兩個以上陣面同時對外發射或接收信號,這要求每個陣面擁有獨立的定時和控制信號,且相互之間不影響,能夠形成獨立的收發波束,完成雷達不同的功能。另外,同時工作對系統的時序、中斷響應、系統控制等提出新的要求,本文闡述了雷達控制系統的設計方法以及關鍵技術的實現。
1 系統硬件組成
雷達控制系統對雷達系統多陣面工作進行控制調度,包括接收雷達任務計算機的指令,實現對雷達工作參數到天線陣面和其他系統的傳輸及對頻率源工作的控制。控制定時器產生雷達所需各種時序,傳輸給頻率源和天線陣面等雷達其他系統。雷達控制系統包括主控器、同步傳輸模塊、接口控制模塊、定時器A、定時器B、定時器C和定時器D,四塊定時器模塊對應四個陣面,系統硬件框圖如圖1所示。
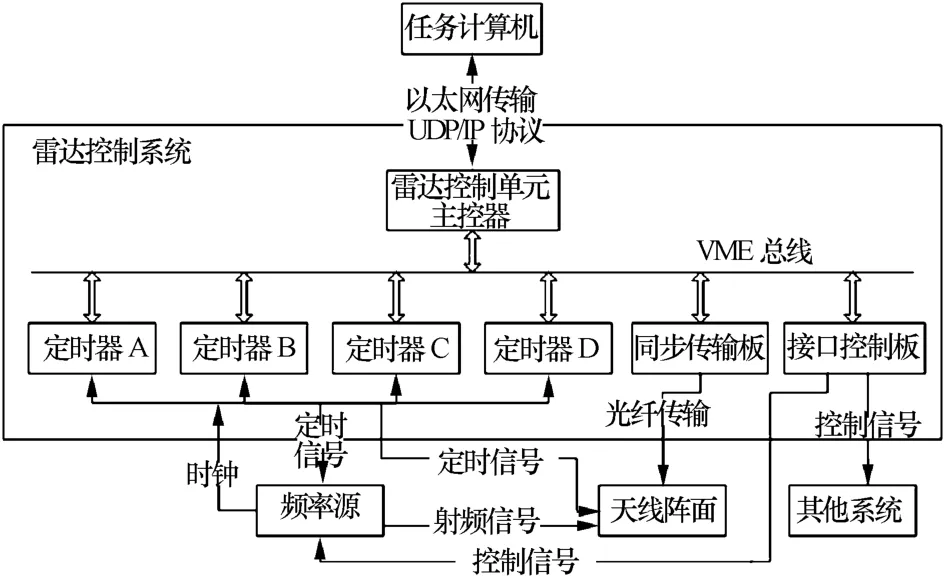
圖1 雷達控制系統組成
其中,主控器為VME總線的嵌入式計算機,用來完成和上層任務計算機的網絡通信,向系統內其他模塊發送VME命令;同步傳輸板、接口控制板、四塊定時器都采用FPGA為核心設計,同步傳輸板主要從VME總線接收主控器命令,通過FPGA的ROCKETIO高速串行模塊打包發送四個陣面的系統控制包信息[3-4],傳送給天線陣面。接口控制板接收VME命令并產生頻率源所需的各種控制信息,通過快速總線傳輸給頻率源,完成對頻率源的控制;四塊定時器主要從VME總線接收工作模式信息,分別產生對應四個陣面所需的系統定時信號,在工作周期結束時產生VME中斷信號反饋給雷達主控器,主控器收到中斷信號后觸發中斷服務任務運行,再發送下一次的VME命令,從而保證控制系統循環有序地執行。
2 系統軟件組成
2.1 VxWorks操作系統的特點
雷達控制軟件駐留在雷達控制系統的計算機上,主要功能包括:(1)上層任務計算機的網絡通信;(2)對網絡信息進行判斷,放入不同的消息隊列;(3)產生各模塊所需的控制參數;(4)響應定時器的VME硬件中斷,通過VME總線向各模塊發送工作模式命令。具體功能如圖2所示。

圖2 雷達控制單元功能圖
其工作流程是基于VxWorks實時操作系統的中斷服務任務和VME總線的多中斷為核心來實現[5-7]。VxWorks具有較好的兼容性和可移植性,具體特點有以下五點[8-10]:
(1)實時性強:最大響應時間≤10 μs。
(2)高效的任務管理:管理任務數目不限,具有256個優先級,采用基于優先級的搶占式調度策略,同時也提供了輪轉調度算法。
(3)快速靈活的任務間通信:任務間通信手段靈活,有信號量、管道、消息隊列、信號、網絡套接字和共享內存等。
(4)高效的中斷和異常事件處理:中斷服務程序在特定的空間運行,不同于其他任何任務,因此中斷處理沒有任務的上下文切換。
(5)VxWorks網絡能與許多運行其他協議的網絡進行通信,如 TCP/IP、4.3BSD、NFS、UDP、SNMP、FTP 等。
2.2 多陣面控制系統設計
單陣面工作是多陣面工作方式的基礎,實際工作中主要是多陣面同時工作,多陣面輪流工作的方式。這也使得系統的復雜度提高,新型數字陣雷達控制系統的特點如下三點:
(1)數字陣需要多陣面同時工作,所以存在四個獨立中斷服務任務,區別于以往的一個中斷服務任務。
(2)數字陣系統有四塊定時器,并且四塊定時器工作模式、脈沖個數、周期、脈寬等受控參數也不一定相同,有四個VME中斷;而以往多陣面共用一塊定時器,并且每個陣面定時信號相同,只有一個VME定時中斷。
(3)數字陣系統中不僅有陣面號控制射頻信號的開關,四個陣面定時和控制信號也是獨立的;而以往陣面切換僅僅靠陣面號去控制射頻信號的開關。
下面將具體介紹多陣面工作時雷達控制系統的運行。
2.2.1 單陣面工作
單陣面工作時只有一個中斷服務任務執行,可以看作多陣面輪流工作的一個特殊情況。工作流程如圖3所示。
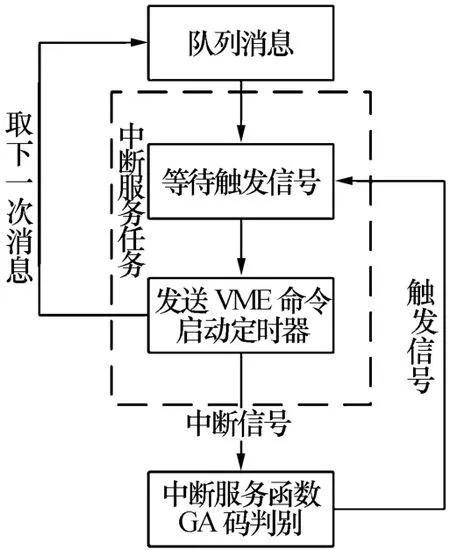
圖3 單陣面工作流程圖
單陣面工作是典型的中斷服務處理任務,任務獲取隊列消息,等待中斷觸發信號到來后執行任務,任務完成再次獲取隊列消息,循環執行。以中斷信號作為觸發保證了上一個工作周期已經結束,然后立即轉入下一工作周期任務。
2.2.2 多陣面輪流工作
多陣面輪流工作時,多個中斷服務任務輪流運行,在同一時間內只有一個中斷服務任務處理消息命令,消息命令的處理狀態如圖4所示。
工作中陣面不切換時,中斷服務任務響應的中斷信號就是對應定時器的中斷信號。陣面切換時,中斷服務任務響應的中斷信號不是對應定時器的中斷信號,而是上一個工作陣面定時器的中斷信號。舉例說明:在A陣面中斷服務任務執行時,定時器A產生中斷信號,從A陣面轉到B陣面的時候,為了保證無縫連接,B陣面的中斷服務任務執行第一個消息時的觸發中斷信號應該是A陣面定時器最后一個中斷信號;以此類推,在每個陣面切換時都如此。具體在設計中不僅要知道當前消息的陣面號,還要知道上一個消息命令的陣面號,通過兩個陣面號判斷有沒有變換陣面,在變換時就要做特別的判斷處理了,否則只以本陣面定時器中斷為觸發條件。以B陣面為例,如圖5所示。

圖4 輪流工作消息狀態圖
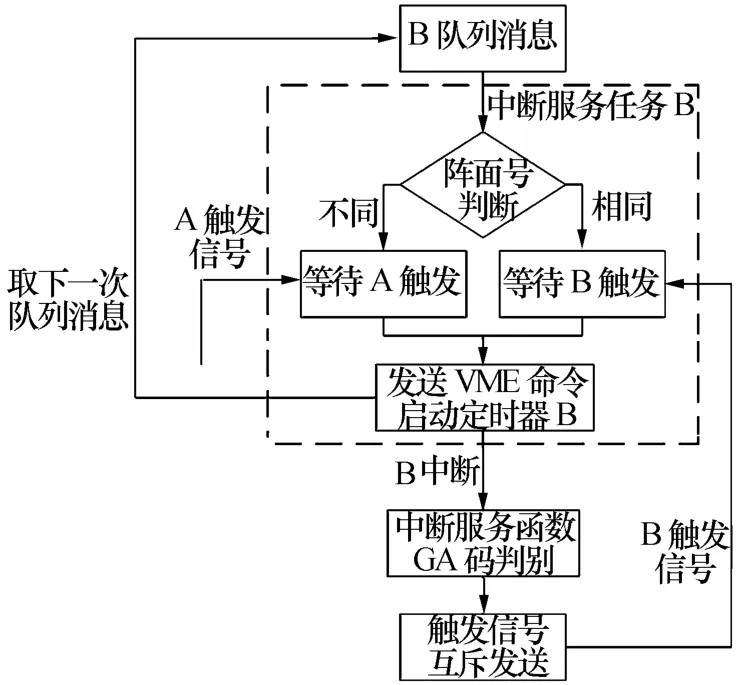
圖5 輪流工作流程圖
由圖5可以看出,通過存儲的上一次執行的中斷服務任務的陣面號和本次陣面號比較,得出陣面有沒有變換,同時也看出這種方式不僅僅可以實現多陣面環掃,理論上四個陣面可以執行類似亂序的輪流工作方式。
2.2.3 多陣面同時工作
多陣面同時工作時,網絡消息通過陣面號區別后放入不同的消息隊列,每個中斷服務任務各自執行。以下是A、B雙陣面工作時中斷服務任務處理消息命令的狀態如圖6所示。
在多陣面同時工作時,要區分每個定時器的VME中斷信號,由于定時器共用同一優先級的中斷信號,區分中斷的方法只有通過中斷向量來區分,設計中采用VME總線的 GAP,GA[0~4]信號作為中斷向量,GAP,GA[0~4]信號是由模塊在機箱物理插槽位置來決定的,這樣就可以區分不同定時器中斷信號。A、B雙陣面同時工作時流程圖如圖7所示。
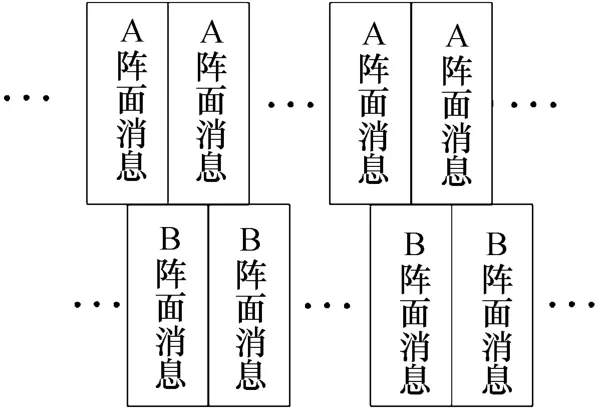
圖6 同時工作消息狀態圖
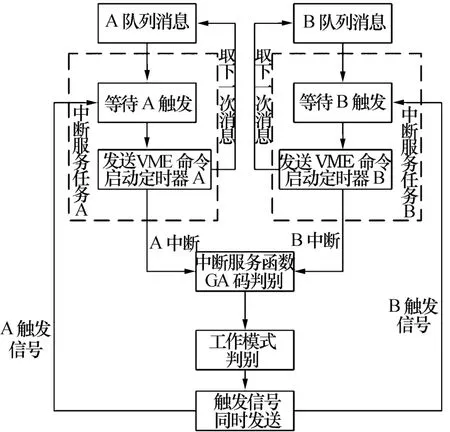
圖7 同時工作流程圖
由圖7可以看出多陣面同時工作時定時器中斷信號只會轉換為對應中斷服務任務的觸發信號。也就是有且僅有本陣面定時器中斷能觸發對應的中斷服務任務。而工作模式的判別使多陣面的多個觸發信號不再互斥,能夠同時觸發,滿足同時工作的要求。
3 結束語
本文所闡述的多陣面雷達控制系統采用基于Vx-Works操作系統設計,利用了VxWorks操作系統的多任務工作特性,高效獨立的中斷處理能力,以及網絡通信等功能,實現了雷達多陣面同時工作和多陣面輪流工作的方式,大大提高了雷達工作的多功能性和靈活性。目前該系統已經在某數字多陣面陣雷達上得到應用。
[1] 酈能敬.預警機系統導論[M].北京:國防工業出版社,1998.Li Nengjing.Introduction of airborne early warning system[M].Beijing:National Defense Industry Press,1998.
[2] 陳國海.下-代預警雷達技術[J].現代雷達,2010,32(3):1-4.Chen Guohai.Technologies for next generation airborne early warning raIdar[J].Modern Radar,2010,32(3):1-4.
[3] 林振華.基于PCI-X和RocketIO的高速數據傳輸系統設計[J].現代雷達,2011,33(6):49-52,57.Lin Zhenhua.Design and implementation of high-speed data transmission system based on PCI-X and rocketIO[J].Modern Radar,2011,33(6):49-52,57.
[4] 杜 旭,于 洋,黃 建.基于FPGA的高速串行傳輸接口的設計與實現[J].計算機工程與應用,2007,43(12):94-96.Du Xu,Yu Yang,Huang Jian.Design and implementation of high-speed serial transmission interface based on FPGA[J].Computer Engineering and Applications,2007,43(12):94-96.
[5] Wind River System S,Inc..VxWorks BSP Developer's Guide,V5.5[Z].[S.l.]:Wind River Systems,Inc.,2003.
[6] Wind River System S Inc..VxWorks OS Libraries API Reference,V5.5[Z].[S.l.]:Wind River Systems,Inc,2003.
[7] 黃銀園.VxWorks操作系統在多功能相控陣雷達中的應用[J].現代雷達,2001,23(4):46-48.Huang Yinyuan.Application of VxWorks operating system in multifunctional phased array radar[J].Modern Radar,2001,23(4):46-48.
[8] 王學龍.嵌入式VxWorks系統開發與應用[M].北京:人民郵電出版社,2003.Wang Xuelong.The development and application of embedded VxWorks system[M].Beijing:Posts and Telecommunication Press,2003.
[9] 周啟平,張 楊,吳 瓊.VxWorks開發指南與Tornado實用手冊[M].北京:中國電力出版社,2004.Zhou Qiping,Zhang Yang,Wu Qiong.Development guide of VxWorks and of Tornado[M].Beijing:China Electric Power Press,2004.
[10] 孔祥營,柏桂枝.嵌入式實時操作系統VxWorks及其開發環境 Tomado[M].北京:中國電力出版社,2001.Kong Xiangying,Bai Guizhi.Embedded real-time operation system VxWorks and development environmen Tomado[M].Beijing:China Electric Power Press,2001.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年16期)2019-01-03 11:39:20
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45