空間繞飛航天器間電磁兼容仿真分析方法
2013-12-29 15:00:34劉巖鄭偉孫犇梁克
航天器工程 2013年2期
關鍵詞:分析
劉巖 鄭偉 孫犇 梁克
(1 南京航空航天大學,南京 210016)(2 中國空間技術研究院載人航天總體部,北京 100094)
1 引言
繞飛運動在空間交會與對接、空間目標識別與偵察、在軌服務與應急情況處理等活動中均有重要的作用,是高級在軌操作的使能控制技術[1]。在繞飛過程中,追蹤航天器(即從航天器)可以通過自身攜帶的觀測儀器,來實現對目標航天器(即主航天器)的觀測,并通過航天器間的無線通信實現相對位置、相對姿態和對方工作狀態等信息的交互。繞飛過程中可能存在主、從航天器天線相互照射的情況,導致航天器間的電磁兼容問題,影響無線通信設備的正常工作,妨礙任務的順利進行。常規的航天器電磁兼容性分析主要針對航天器自兼容[2-3]、內部電路電磁兼容[4]、模塊電磁兼容[5]等方面進行研究,持續相對運動的航天器間的電磁兼容問題分析則很少涉及。
本文首先利用主、從航天器的質心相對運動信息,結合航天器表面天線的布局情況,對繞飛任務中的兩航天器進行建模,為電磁兼容分析計算進行準備;然后對電磁兼容領域的經典Friis傳輸方程進行分析[6],研究該公式在繞飛航天器電磁兼容問題上的應用,總結出空間繞飛任務中航天器間電磁兼容問題的仿真分析方法并進行驗證計算;最后由Friis傳輸方程進行拓展,得出工程應用上相關重要參數的計算方法。
2 繞飛任務中主從航天器間電磁兼容分析模型
空間繞飛任務中,常見的相對運動模型包括CW 方程、T-H 方程和幾何法相對運動模型[1],其中C-W 開環繞飛在控制精度、相對敏感器測量精度、燃料消耗[1]等方面均要求較低,在工程中實現難度較小。本文主要針對C-W 開環繞飛中主、從航天器間的電磁兼容問題進行分析。
為了描述從航天器與主航天器之間的相對運動,引入3個坐標系[7],如圖1所示。
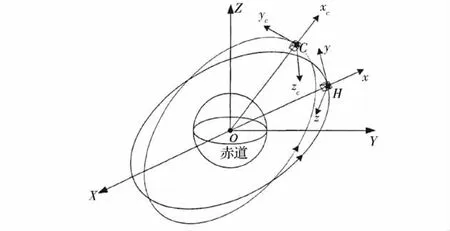
圖1 坐標系示意圖Fig.1 Sketch map of coordinate
(1)慣性坐標系N:即地心赤道慣性坐標系,其原點在地心,X軸指向春分點,Z軸垂直于赤道面指向北極,Y軸由右手法則確定。
(2)主航天器軌道坐標系H:也稱為相對運動坐標系或Hill坐標系,其原點在主航天器質心;x軸與主航天器位置矢量r重合,由地心指向主航天器;y軸在主航天器軌道面內與x軸垂直,沿運動方向為正;z軸垂直于軌道面,與x、y軸構成右手系。
(3)從航天器軌道坐標系C:其原點在從航天器質心,3個坐標軸xc、yc、xc的定義方式與坐標系H一致。
基本假設如下:地球為均質球體,完全中心引力場;將地球和航天器看作質點。
由于C-W 繞飛運動為從航天器經主動控制以主航天器為中心進行軌跡運動,所以本文中選取主航天器軌道坐標系H對主、從航天器的相對位置進行表示,假設從航天器在主航天器上方進行繞飛運動,繞飛的起點和終點為主航天器在H坐標系下的前向5.2km(y軸正常)和后向5.2km 位置(y軸負向),C-W 繞飛飛行軌跡示意如圖2所示。
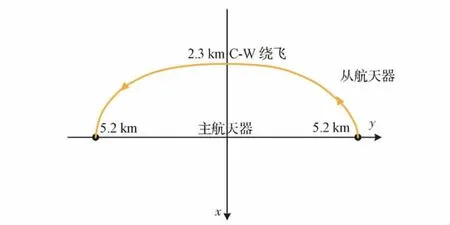
圖2 C-W 繞飛飛行軌跡示意圖Fig.2 C-W Fly-around trail
3 繞飛任務中主從航天器間電磁兼容分析方法
進行繞飛任務中主、從航天器間電磁兼容分析,需收集整理繞飛過程中,主、從航天器使用的各無線發射和接收設備的頻點、天線布局、天線方向圖、發射功率、發射機帶外抑制、發射天線最大增益、接收天線最大增益和接收機靈敏度等指標,以及繞飛過程中主、從航天器的相對姿態和相對距離等數據。
由于從航天器在主航天器上方繞飛過程中,其對地面天線可能對主航天器對天面天線進行照射,主航天器對天面天線可能對從航天器對地面天線進行照射,產生電磁干擾問題;而對于主航天器的對地面天線及從航天器的對天面天線的干擾問題,由于繞飛過程中兩航天器姿態保持穩定(三軸穩定對地),所以,對方天線的發射信號傳輸路徑將被本方艙體遮擋,經過信號繞射或艙體爬行到達艙體另一側的信號相當微弱,近似于底噪,對接收天線的影響可忽略不計,認為不會產生干擾。繞飛過程中主、從航天器之間的電磁兼容問題,僅分析兩航天器相對艙體面上天線之間的干擾問題。
根據無線電波傳輸理論,發射天線對接收天線的干擾情況可采用Friis傳輸方程的等效干擾計算公式進行估算,得到發射天線對接收天線的等效干擾信號強度。由于天線方向圖含有角度信息,不同入射角的發射/接收天線增益不同。Friis傳輸方程中,等效干擾強度與發射天線和接收天線增益成正比,出于加嚴計算的考慮,選取發射天線和接收天線的最大增益進行計算,即不考慮繞飛過程中的天線指向問題,認為整個繞飛過程中發射天線和接收天線均保持正對狀態。
等效干擾計算公式,即Friis傳輸方程如下:
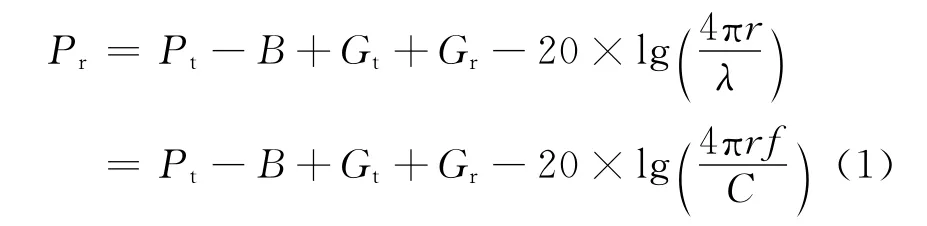
式中:Pr為等效干擾的接收功率(dBm);Pt為發射功率(dBm);B為發射機帶外抑制(dBc);Gt為發射天線最大增益(dB);Gr為接收天線最大增益(dB);r為收發天線距離(m);λ為接收頻率波長(m),λ=C/f,C為光速(m/s),f為接收天線頻率(MHz);20×為空衰(dB);Gt+Gr-20×為天線隔離度(dB)。
等效干擾信號與接收機的靈敏度比較,得出發射機與接收機之間的安全裕量(即發射機的等效干擾信號強度與接收機的靈敏度之差)。根據GJB3590-99航天系統電磁兼容性要求規定[8],繞飛過程中主、從航天器所使用的射頻設備電磁干擾危害度類別為II類(性能下降,包括任何自主操作能力的喪失),安全系數要求為6dB;出于加嚴考慮,可將設備電磁干擾危害度類別提高為I類,安全系數提高為12dB;若分析選用的發射或敏感度特性為估算值,需在安全系數上增加6dB,考慮2dB余量之后,設定本次分析的安全裕量為20dB。如果分析結果中安全裕量大于20dB,則認為可兼容工作;如果安全裕量在0~20dB之間,則認為也可以兼容工作,但是安全裕量不足,需要關注;如果安全裕量為負數,則認為發射機可能對接收機產生干擾。
4 仿真研究
4.1 計算模型
假定某主航天器A 和從航天器B執行C-W 開環繞飛試驗,航天器A 對天面安裝有2副發射天線和2副接收天線,航天器B 對地面安裝有2副發射天線和2副接收天線。給定航天器A 和航天器B發射天線和接收天線的發射功率、帶外抑制、天線增益、接收頻率等指標,如表1所示。
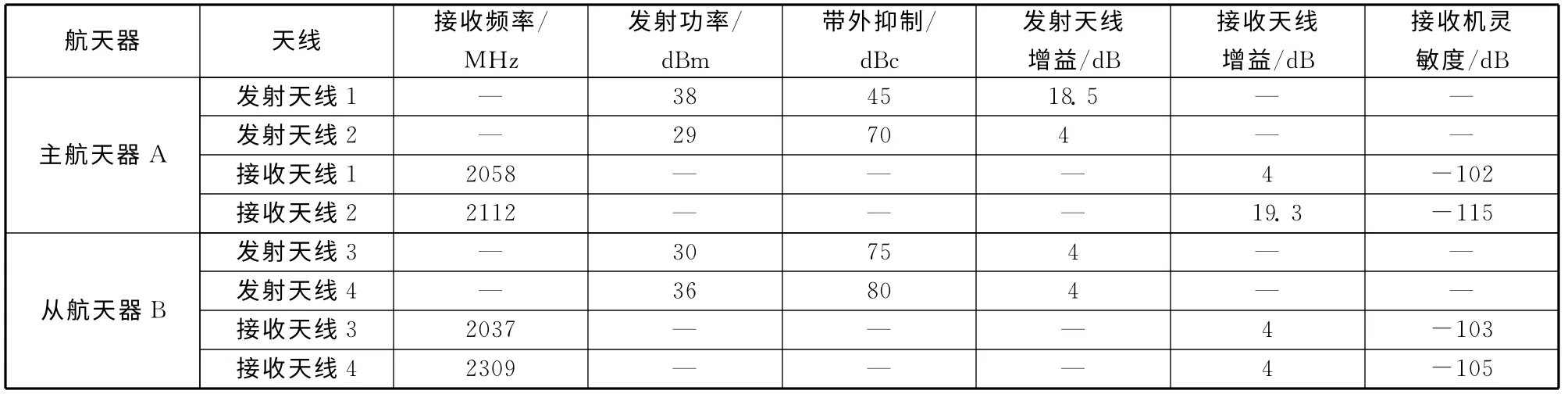
表1 主、從航天器天線指標Table 1 Parameters of main and slave spacecraft’s antenna
此外,假定主、從航天器為350km 近地軌道運行的航天器,根據C-W 相對控制方程,采用STK 軌道仿真計算軟件,得到主從航天器之間的相對距離,計算結果如圖3所示。
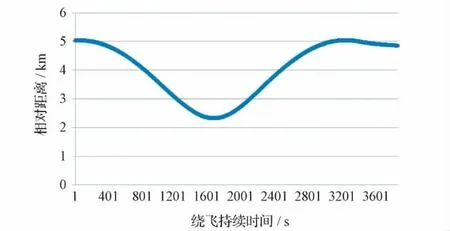
圖3 繞飛過程中主、從航天器相對距離Fig.3 Reletive interval between main and slave spacecraft
由以上主、從航天器模型、天線指標(見表1)和相對距離指標(見圖3),代入式(1),反映了主航天器A 和從航天器B之間的空衰和天線隔離度。
4.2 計算結果
圖4~圖11顯示了主、從航天器發射天線對對方接收天線可能產生的等效干擾的安全裕量。由圖4、圖5可知,主航天器A 發射天線1與從航天器B接收天線3和接收天線4之間的安全裕量小于0,可能產生電磁干擾,影響正常使用,在軌任務階段應采取合理處置措施。圖6~圖11表示主航天器A 發射天線2與從航天器B接收天線、從航天器B發射天線與主航天器A 接收天線1之間的安全裕量大于20dB,從航天器B發射天線與主航天器A 接收天線2之間的安全裕量大于0dB,但不足20dB,應重點關注。
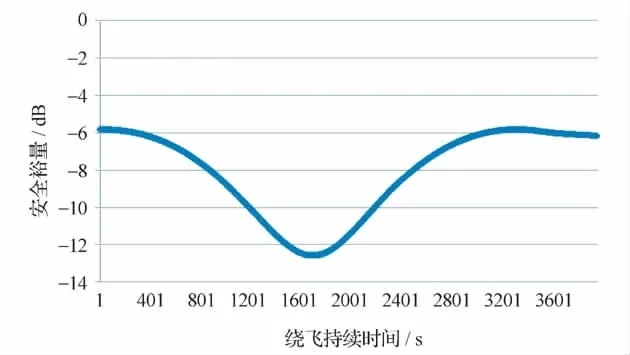
圖4 發射天線1對接收天線3安全裕量Fig.4 Allowance between transmitting antenna 1and receiving antenna 3
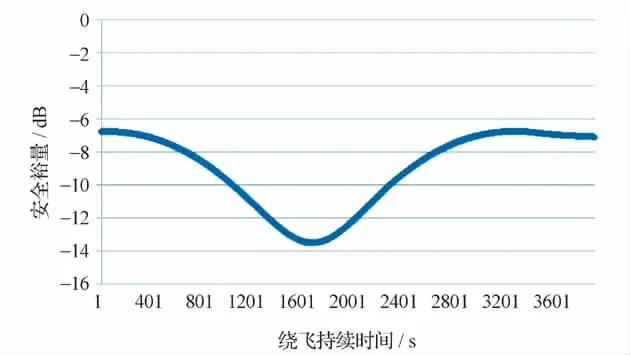
圖5 發射天線1對接收天線4安全裕量Fig.5 Allowance between transmitting antenna 1and receiving antenna 4
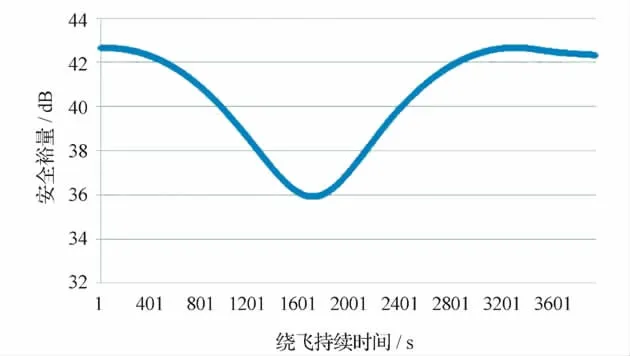
圖6 發射天線2對接收天線3安全裕量Fig.6 Allowance between transmitting antenna 2and receiving antenna 3
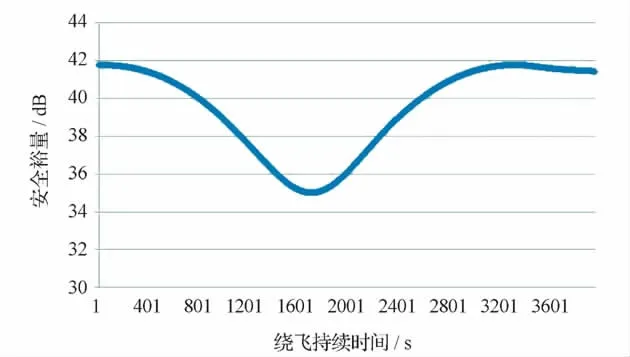
圖7 發射天線2對接收天線4安全裕量Fig.7 Allowance between transmitting antenna 2 and receiving antenna 4

圖8 發射天線3對接收天線1安全裕量Fig.8 Allowance between transmitting antenna 3and receiving antenna 1
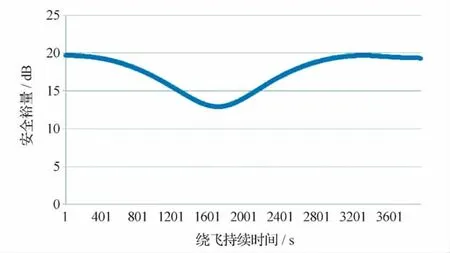
圖9 發射天線3對接收天線2安全裕量Fig.9 Allowance between transmitting antenna 3and receiving antenna 2
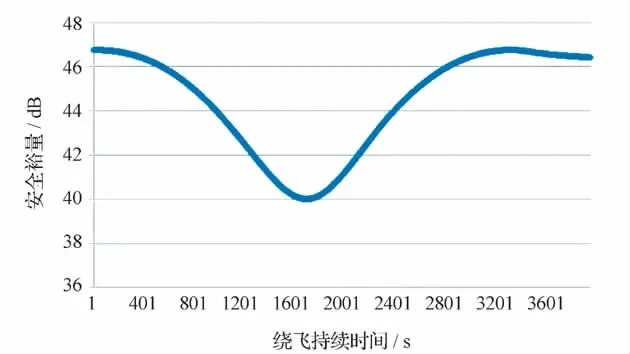
圖10 發射天線4對接收天線1安全裕量Fig.10 Allowance between transmitting antenna 4and receiving antenna 1
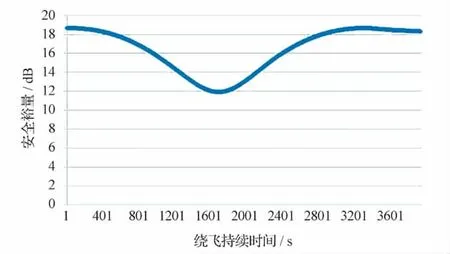
圖11 發射天線4對接收天線2安全裕量Fig.11 Allowance between transmitting antenna 4and receiving antenna 2
分析結果中安全裕量不足的工況可能由于控制精度問題導致航天器間距過小,從而引起與分析結論不一致的情況。為此,對安全裕量不足的工況通過反解Friis傳輸方程,得出航天器間極限距離,為在軌控制方式提供支持。極限距離公式如下:

式中:M為接收機靈敏度(dB)。
5 結束語
本文給出了一種基于Friis傳輸方程的空間繞飛任務中,航天器間電磁兼容問題的仿真分析方法,并結合假定模型進行了仿真計算。針對假定航天器天線模型數據,對主、從航天器之間發射天線對接收天線的電磁干擾情況進行了仿真分析。分析結果表明:本文提出的方法能夠實現繞飛任務中持續運動的航天器間電磁兼容問題的分析,可為實際任務故障預案的設計提供參考。
(References)
[1]蘭宏煒,江涌.目標監視繞飛導引方法研究[J].系統工程與電子技術,2008(9):1735-1739
Lan Hongwei,Jiang Yong.Study on flying-around guidance law for tracking space target[J].Systems Engineering and Electronics,2008(9):1735-1739 (in Chinese)
[2]彭勤素,伏川惠,陳軼博,等.TY-3火箭電氣系統電磁兼容性設計[J].固體火箭技術,2001(3):1-4
Peng Qinsu,Fu Chuanhui,Chen Yibo,et al.The electromagnetic compatibility design of electrical system for TY-3rocket[J].Journal of Solid Rocket Technology,2001(3):1-4(in Chinese)
[3]葉興彬,莊磊,高俊英.總體方案階段星載天線電磁兼容的仿真[J].安全與電磁兼容,2012(3):58-60
Ye Xingbin,Zhuang Lei,Gao Junying.Simulation analysis of EMC between spaceborne antennas in scheme phase of satellite system design[J].Safety & EMC,2012(3):58-60(in Chinese)
[4]張金祥,張佳鶯,王慶成.小衛星總體電路電磁兼容性設計[J].哈爾濱工業大學學報,2003(2):106-108
Zhang Jinxiang,Zhang Jiaying,Wang Qingcheng.Design of electromagnetic compatibility for overall circuits of small satellite[J].Journal of Harbin Institute of Technology,2003(2):106-108(in Chinese)
[5]王少寧,張俊峰.航天器DC-DC模塊電源電磁兼容設計[J].安全與電磁兼容,2007(4):62-64
Wang Shaoning,Zhang Junfeng.Design of EMC for spacecraft DC-DC module supply[J].Safety & EMC,2007(4):62-64(in Chinese)
[6]柯林R E.無線電與無線電波傳輸[M].大連海運學院出版社,譯.大連:大連海運學院出版社,1988:212-213
Collin R E.Radio and transmission of radio wave[M].Dalian Haiyun Press,translated.Dalian:Dalian Haiyun Press,1988:212-213
[7]朱彥偉.航天器近距離相對運動軌跡規劃與控制研究[D].長沙:國防科學技術大學,2009
Zhu Yanwei.Study on trajectory planning and control for spacecraft proximity relative motion[D].Changsha:Guofang University,2009(in Chinese)
[8]國防科學技術工業委員會.GJB 3509-99 航天系統電磁兼容性要求[S].北京:國防科學技術工業委員會,1999
Commission of Science,Technology and Industry for National Defence.GJB 3590-99Electromagnetic compatibility requirements for space systems[S].Beijing:Commission of Science,Technology and Industry for National Defence,1999
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
