一種數字控制三相逆變電路的局部振蕩行為分析*
2013-12-12 13:05:14雷博肖國春吳旋律
物理學報 2013年4期
雷博 肖國春 吳旋律
(西安交通大學電氣工程學院,電力設備電氣絕緣國家重點實驗室,西安 710049)
(2012年7月10日收到;2012年9月18日收到修改稿)
1 引言
隨著全球化能源危機的不斷加劇,利用風能、光伏發電等可再生能源的分布式發電系統得到了廣泛的關注.在這些分布式發電系統中,逆變電路作為可再生能源與電網之間的“連接橋梁”起到了重要的作用[1],得到了廣泛的應用.數字控制技術的發展,使得目前在實際工程應用中三相逆變電路一般工作在數字控制脈寬調制(PWM)模式下[2].同時,由于數字控制中一拍延時的引入,對系統的穩定性以及動態特性會產生較大的影響[3,4].對數字控制三相逆變電路的動力學特性進行準確的建模分析是非常必要的.
已有許多學者對單相全橋無源逆變電路的動力學特性進行了分析[5?13],同時觀測到豐富的非線性現象,如邊界碰撞分岔[5?7,11]、倍周期分岔[8?10]以及Hopf分岔[8,10,12,13].文獻[5—7]建立了一階數字控制單相全橋電路工作在DC-DC狀態下的離散迭代映射,并提出了可以提高系統穩定性的改進延時反饋策略.文獻[9]通過分析一階數字控制單相全橋逆變電路的非線性行為,提出了慢變穩定性定理.文獻[11]分析了一階數字控制單相全橋逆變電路在對稱PWM調制下的邊界碰撞分岔現象.但文獻[5—7,9]目前并沒有對與數字控制系統穩定性密切相關的一拍延時的影響進行分析.同時,文獻[5—11]在推導系統的離散迭代模型時,直接利用狀態轉移矩陣進行分析.當系統階數高于2階時,由于狀態轉移矩陣的元素與狀態變量有關并且無法解析表達,無法解析描述系統每個狀態變量與系統參數的關系.這時,通常需要借助計算機數值計算循環描點才能表示出系統參數與系統運動行為的關系[8?10].文獻[12,13]在考慮了數字控制系統延時的情況下,通過解析表達狀態轉移矩陣中各個元素,對單相全橋無源逆變器建立了數學模型,分析了LC型濾波器以及LC L型濾波器單相無源逆變電路系統中復雜行為的內在機理,得到了其參數的穩定范圍的解析表達式并準確預測了系統發生不穩定現象.這些工作加深了對單相全橋逆變電路的理解,但均集中在單相系統中.同時,上述工作中的慢尺度不穩定現象在一個工頻周期內是同時發生的.而在三相逆變系統中,系統可能會產生局部的振蕩現象.在考慮一拍數字延時以及解析表達狀態轉移矩陣中元素的前提下,對數字控制三相逆變電路利用離散迭代模型分析其局部振蕩行為的工作迄今為止未見報道.
本文針對一種數字控制三相逆變電路,通過解析表達狀態轉移矩陣中元素、考慮數字控制中的一拍計算、控制延時并考慮到三相電路中的不平衡因素,建立了系統的離散迭代模型.利用本文提出的離散迭代模型,系統參數與系統運動行為之間的關系可以得到直觀的解析描述.進一步,本文提出了系統發生Hopf分岔、倍周期分岔以及鞍階分岔的解析判別式.利用本文提出的離散迭代模型及不穩定行為判別式,準確預測了本文研究系統的不穩定現象及穩定邊界.同時,對系統產生的局部振蕩現象進行了分析,得出了這種現象產生的物理機理及產生條件.最后,通過Simulink仿真以及電路實驗驗證了理論分析的正確性.
利用離散迭代模型,本文建立了數字控制三相逆變電路中系統參數以及系統運動行為之間解析聯系,揭示了三相逆變系統的耦合關系,發現了局部振蕩現象,指出了局部振蕩的產生條件,準確預測了系統參數和局部振蕩起始點之間的關系,同時簡化了利用離散迭代模型對系統不穩定行為預測的過程,有利于實際工程應用.
2 電路工作原理及離散迭代模型建立
數字控制三相逆變電路的主要功能是對逆變電流的穩定控制,保證逆變電流符合設計要求.逆變電路以固定的開關頻率 fs運行,逆變電流頻率為f,角頻率為ω.電路由主電路部分以及數字控制部分組成,系統結構如圖1所示.主電路部分由直流側電壓源E、三相逆變逆變器和三相阻感負載Ra,Rb,Rc及La,Lb,Lc構成.數字控制部分由采樣環節、三相靜止坐標系到兩相同步坐標系的正變換及反變換環節、數字控制器、歸一化環節、限幅器及數字PWM發生器組成.系統采取了兩相旋轉坐標系下的逆變電流反饋環的控制方式,其中電流環采取的是比例(P)控制器.圖1中,CM環節代表電流采樣環節;θs是給定逆變相位;idref和iqref是兩相旋轉坐標系下的給定值,是一個直流信號;ia,ib,ic分別為三相逆變電流;ia,ib,ic結合θs通過三相靜止坐標系到兩相旋轉坐標系變換公式(DQ變換)得到兩相同步旋轉坐標系下的逆變電流id,iq;kpd,kpq分別為d軸與q軸下的比例系數;d軸以及q軸的輸出信號分別為vdx以及vqx;vdx,vqx結合θs通過兩相旋轉坐標系到三相靜止坐標系變換公式(DQ反變換),進行歸一化及限幅環節得到三相的控制信號vax,vbx,vcx;其中ksat為歸一化系數,其大小為1/(2E).在每個開關周期的起始階段,系統通過采樣、計算各個電氣量,利用數字PWM發生器產生占空比信號以驅動S1—S6運行.

圖1 數字控制三相逆變電路系統
本文采用的數字控制雙極性正弦脈沖調制(SPWM)策略如圖2所示.上下兩個橋臂工作在互補狀態,即若上管導通則下管關閉,反之亦然.各個橋臂的開關狀態分別由控制信號vax,vbx,vcx與三角載波的大小關系決定.由于數字控制中的采樣計算延時[3,4],第n個開關周期的占空比狀態dan,dbn和dcn由第(n?1)個開關周期的控制信號vax(n?1),vbx(n?1),vcx(n?1)決定,占空比信號的值為0或者1.當dna=1時代表S1開通S4關閉,dna=0時代表S1關閉S4開通;當dnb=1時代表S3開通S6關閉,dna=0時代表S3關閉S6開通;當dnc=1時代表S5開通S2關閉,dnc=0時代表S5關閉S2開通.

圖2 數字SPWM調制策略示意圖
2.1 控制電路離散迭代模型描述
根據兩相旋轉坐標系到三相靜止坐標系變換關系,vax,vbx,vcx三相控制信號之和為0,所以三個占空比信號也只有兩個自由度.本文中選取a相及b相占空比作為狀態變量.由于逆變電流是正弦信號,系統是一個周期時變系統.但由于 fs遠大于 f,同時系統采用數字控制,在一個開關周期內只進行一次電氣量的采樣、計算及占空比信號的載入,通過準靜態分析[14],可以認為在一個開關周期內三相逆變電流是恒值.由于數字系統中的采樣保持過程,根據系統的控制原理可以直接得出系統控制部分的離散迭代方程.
設iden,iqen和vdxn,vqxn分別是第n個開關周期d軸和q軸下誤差信號以及控制器輸出信號;kdp,kqp分別是d軸和q軸下的比例控制參數;設ian,ibn,icn,θsn分別代表第nTs時刻三相逆變電流和旋轉坐標同步角的采樣值.得出da和db的離散迭代方程為

根據三相關系,得到dcn與dan,dbn的關系為

通過(1)式可以得到系統占空比的迭代方程,具體推導過程見附錄1.
2.2 主電路離散迭代模型描述
根據基爾霍夫電流定律,三相電流之和為0,三相電流只有兩個自由度.選取其中兩相逆變電流i=[iaib]T作為狀態變量.設AT,BET,(T=000,111,100,110,101,010,011,001)是系統在不同拓撲下的狀態矩陣.從圖3中可以看出,當系統的開關狀態發生變化時,只有直流側電壓的狀態發生改變,令AT=A.A和BET的具體表達式見附錄2.同時,為了方便描述,定義θa=0,θb=?2π/3和θb=2π/3.
系統主電路部分在各個拓撲狀態下的狀態方程為

在系統第n個開關周期的運行過程中,根據dan,dbn和dcn的大小關系,結合圖2和圖3,系統將會演化出6種不同的拓撲序列結構,如圖4所示.
由于系統采用的是對稱SPWM調制策略,系統可能的拓撲序列為T000→Tα→Tβ→T111→Tβ→Tα→T000.其中[α,β]有[100,110],[100,101],[010,110],[010,011],[001,101]和[001,011]6種可能性.
結合(2)式,對拓撲序列進行分段積分.積分結果表明,系統在這六種可能拓撲序列中的離散迭代方程是相同的,可以表示為

其中

系統離散迭代模型的推導過程及BEa,BEb和BEc的具體表達形式見附錄3.

圖3 三相逆變器拓撲狀態示意圖 (a)T000;(b)T100;(c)T010;(d)T001;(e)T111;(f)T011(g)T101;(h)T110
根據(1)和(3)式可以得出系統的離散迭代方程,其中數字控制部分由于一拍延時作用,得到的是各相獨立的“標量化”離散迭代方程,但是主電路迭代模型(3)式直接使用狀態轉移矩陣進行分析,無法得出各相逆變電流之間、逆變電流與系統參數、逆變電流與各相占空比之間的解析關系.利用矩陣A的特征值和特征向量,可以描述狀態轉移矩陣[15],同時利用文獻[12,13]中提出的方法,對此離散迭代方程進行標量化描述.
設λA1,λA2為矩陣A的特征值,數字控制三相逆變器主電路中a,b兩相的標量化離散迭代方程為

同時,根據三相之間的關系,得到c相的表達式為

(4)式的推導過程以及函數 δ,Γχ1χ2χ3(χ1,χ2,χ3=1,2,3)及 φvsy1y2(y1,y2=a,b)的定義詳見附錄4.

圖4 第n個開關周期系統可能的拓撲情況 (a)dan>dbn>dcn;(b)dbn>dan>dcn;(c)dcn>dan>dbn;(d)dan>dcn>dbn;(e)dbn>dcn>dan;(c)dcn>dbn>dan
結合(1a),(1b),(4a)和(4b)式,可以得出在兩相同步旋轉坐標系下采用P控制、各相為阻感負載時的數字控制三相逆變電路的標量化離散迭代模型.系統共含有4個獨立的狀態變量,ia,ib,da,db.在下一節將通過分析系統在平衡點處的雅克比矩陣特征值來對系統的運動行為以及穩定特性進行分析.
3 系統穩定性分析
3.1 系統的穩定特性
通過準靜態分析[14],結合(1)和(4)式,令dbn可以求出系統的平衡點.根據系統開關頻率和工頻頻率之間的關系,系統共有 fs/f個平衡點.需要注意的是,求解平衡點的方程是超越方程,需要利用牛頓下山法等數值算法進行求解.系統的平衡點分別設為,,和(0<l≤fs/f),設l為系統平衡點序列的序號.
系統在第l個平衡點的雅克比矩陣可以寫為

根據(5)式,得出了系統在第l個平衡點的特征方程為

其中,F0—F3具有解析的表達式,其具體參數表達式詳見附錄5.同時,根據根與系數的關系,設λJ1—λJ4為(6)式的根,系統的特征方程同樣可以描述為

隨著系統控制參數的增大變化,系統的特征根會穿出單位圓,系統會發生不穩定行為.當系統中有一對共軛虛根穿出單位圓,而余下的特征根在單位圓內,系統會發生Hopf分岔[14];當有一個特征值等于1,而其他特征值在單位圓內,系統會發生鞍結分岔;當一個特征根等于?1,而其他特征值在單位圓內,系統會發生倍周期分岔[16?19].

根據系統控制規律,kdp和kqp均大于0.在表1所示的系統參數下,在系統的每個平衡點處,以系統控制kdp和kqp為變量,可以對(8)式所代表的三個邊界曲線bH,bS和bP在第一象限繪制出一組曲線.通過三條曲線之間的關系,可以預測出系統將會發生的不穩定現象,以及各種不穩定現象發生時的邊界控制參數.
根據表1中參數定義,依據準靜態分析,在一個工頻周期內,系統共含有300個平衡點.在系統的300個平衡點上,根據(8)式代表的三種分岔行為判別式,分別繪制三種邊界曲線.根據三種邊界曲線之間的穩定性關系,可以發現,在這個數字控制三相逆變器系統中,系統只會發生Hopf分岔,而不會發生其他的分岔類型.

表1 系統參數表
3.2 局部振蕩行為分析
對比(9)式中各個等式,當kqp與kdp相等時,等于0,同時也是與系統平衡點序號l的無關量.但是,當kqp與kdp不相等時,會隨著系統平衡點序列號l(0<l≤fs/f)而做周期性的變化,顯然,其變化周期為工頻周期的兩倍.由此,預測系統在kdp不等于kqp的情況下,在一個工頻周期內,系統的穩定性不一致,會出現局部不穩定現象.根據之前分析,由于此系統在表1所示參數下,只會發生Hopf分岔,所以此時系統將會出現局部振蕩現象;而當kdp=kqp的情況下,系統在一個工頻周期內的穩定性一致,系統不穩定時,將會產生的是全局振蕩現象.下面就kdp與kqp的不同關系對系統的穩定性進行分析.
根據控制器參數定義,kdp和kqp均大于0.根據3.1分析結果,在表1所示參數下,系統在300個平衡點上均只會發生Hopf分岔.同時考慮計算方法原理[20],為了避免數值計算誤差,以ksatkdp為橫坐標,以ksatkqp為縱坐標,從第15個平衡點開始每隔15個平衡點,畫出此時系統第一象限中的bH曲線組,如圖5所示.
如圖5所示,由于系統的特征方程(6),及相應的Hopf分岔邊界條件(8a)中與平衡點序列號l相關,所以不同的平衡點的穩定范圍有所不同.同時系統的穩定特性具有對稱性,對稱周期為工頻周期的一半.對于某一特定的控制參數,在系統一部分平衡點處系統穩定,而在其他平衡點處系統不穩定,系統就會產生局部振蕩現象.
根據圖5所示,當控制參數ksatkdp=0.5(kdp=100),ksatkqp=0.95(kqp=190)時,將會在第45—90平衡點處及195—240平衡點附近出現振蕩現象,而在工頻周期的其他部分,系統是穩定的.
根據 (9)式中各式定義,當 kdp=kqp時,和平衡點序列號 l無關,則系統的特征方程(6)及系統穩定邊界條件(8)中各式與系統平衡點無關.此時,若系統發生不穩定現象,那么這種不穩定運動將在一個工頻周期內的所有平衡點同時發生.定義此時求取穩定邊界的方程為


此時,系統只有一個控制參數ksatkdp,同樣從第15個平衡點開始,以15為步進,給出(10)式的根的分布情況如圖6所示.從圖6上可以看出,不同平衡點對應(10)式的根相同,與之前推論符合.
根據參數定義,(10)式在正半軸最小的實根即為使系統穩定的最大控制參數取值.通過精確的計算,此系統在kdp=kqp的條件下的穩定邊界為

對比圖5,圖中所有的穩定邊界交匯于一點,這點坐標下的控制參數是0.7390395(kdp=dqp=147.8079),滿足于(11)式關于kdp=kqp情況下穩定邊界的判斷.當系統控制參數不滿足(11)式時,系統將會在整個工頻周期內同時發生不穩定振蕩現象.
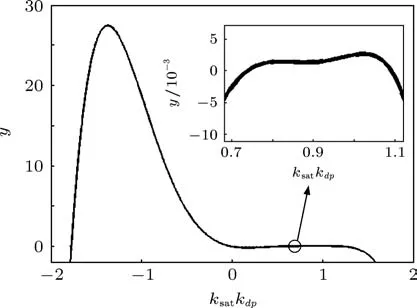
圖6 kd p=kq p時,穩定邊界方程根的分布情況
4 仿真和實驗
根據圖1,給出系統相應的Simulink仿真電路圖如圖7所示.整個仿真系統采用連續仿真,同時利用比較模塊以及延時模塊模擬了數字控制系統的采樣保持、計算延時過程.
假設3認為,對于成長期企業,碳信息披露會顯著緩解企業的融資約束。為了檢驗假設3,對處于成長期的288個樣本數據進行多元回歸。表5的假設3部分列示了碳信息披露對成長期企業融資約束影響的估計結果。結果顯示:(1)CFAt-1的系數在1%的水平下顯著為正 (系數為0.0013,t值為2.79),表明成長期的重污染企業普遍面臨較強的融資約束;(2) CFAt-1×CDI的系數在1%的水平下顯著為負 (系數為-0.2435,t值為-2.91),表明碳信息披露對成長期企業融資約束的緩解效應顯著。假設3檢驗通過。
代入控制參數kdp=100,kqp=190,仿真結果如圖8所示.圖8中出現了局部振蕩現象,局部振蕩周期為工頻周期一半,振蕩起始、終止點與理論分析一致,證明了理論分析的有效性及精確性.
代入控制參數kdp=kqp=150,系統的仿真結果如圖9所示.圖9中出現了全局振蕩現象,證明了理論分析的有效性及精確性.

圖7 數字控制三相逆變系統仿真電路圖

圖8 kd p=100,kq p=190時系統仿真結果
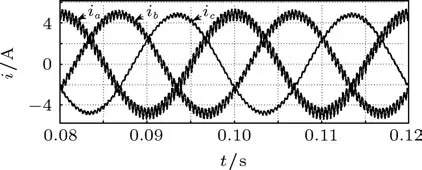
圖9 kd p=kq p=150時系統仿真結果
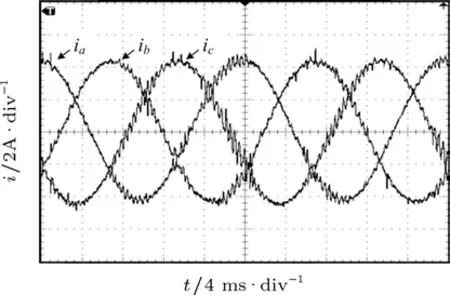
圖10 kd p=100,kq p=190時試驗波形

圖11 kd p=kq p=150時試驗波形
對三相系統的運動行為進行試驗研究,以驗證理論分析的正確性.實驗電路拓撲結構與圖3相同,系統參數選取如表1所示.分別選取控制參數kdp=100,kqp=190;kdp=kqp=150,進行試驗,實驗結果如圖10及圖11所示.實驗結果與Simulink仿真結果相似.由于沒有考慮逆變器死區作用以及開關管的損耗等,實驗產生了一定的誤差.
5 結論
本文針對數字控制三相逆變電路系統,對其在同步旋轉坐標系比例控制下的一種局部振蕩行為進行了分析.通過解析表達狀態轉移矩陣中元素,建立了系統各個狀態變量離散迭代方程,從而得到了三相逆變電流之間和逆變電流與各相占空比、系統參數之間的內在物理聯系.進一步,本文針對高階系統,提出了一種運動行為解析判別式,揭示了三相逆變系統的耦合關系以及運動行為的內在物理機理,準確預測了系統的穩定范圍以及不穩定現象.
以往針對全橋逆變器,利用非線性理論進行建模分析的工作主要集中在單相領域,同時它們的不穩定現象在一個工頻周期內是同時發生的.通過本文對三相系統的研究,發現系統會發生有別于單相系統的局部的振蕩現象.本文針對這種局部振蕩現象,進行了理論分析,得出當D軸比例系數與Q軸比例系數超出一定范圍且兩者不相等時,就會發生這種局部振蕩現象.本文得到了控制參數與局部振蕩點關系的解析表達式,并準確預測了產生局部振蕩的起始、結束點.最后,通過Simulink仿真以及電路實驗證明了理論分析的正確性及有效性.
附錄A1
根據三相靜止坐標系到兩相旋轉坐標系轉化公式:

通過由此得到系統的誤差信號,設為iden和iqen,可以表達為


根據兩相旋轉坐標系到三相靜止坐標系變換公式及圖1所示控制框圖,得到vyxn(y=a,b,c)三相控制信號為

由于三相控制信號由DQ反變換得來,則三相控制信號之和為0.
結合圖3,可以得到dyn(y=a,b,c)的表達式為

結合(A7)和(A8)式,可以分別得出三相系統控制部分的離散迭代方程表達式.
附錄A2
A和BET在8種拓撲狀態下的表達式為

其中α1,α2和α3可以表達為

其中:

附錄A3
對(2)式進行積分,設積分起始時間為ton,結束時間為toff,拓撲結構為Tt,積分結果為
如圖7所示,系統可能的拓撲序列為T000→Tα→Tβ→T111→ Tβ→ Tα→T000.其中 [α,β]有 [100,110],[100,101],[010,110],[010,011],[001,101]和[001,011]六種可能性.在第n個開關周期內,設占空比最大相為g相,最小相為s相,另一相為m相,通過代入相應參數對(C1)進行迭加,得到:

其中φEg,φEm和φEs為

可以分六種情況討論(C3)和(C4)的表達式變化,在此以[α,β]=[100,110]時為例進行分析.此時占空比最大的為a相,最小的為c相,則

對于其他5種情況,均可以寫出相應的BEa,BEa和BEa表達式.根據附錄1中定義,發現在六種情況下BEa,BEa和BEa的表達式相同,于是重新定義BEa,BEb和BEc:
附錄A4
根據文獻[12,13]中的方法,同樣定義κ,ρ為系統矩陣A的特征向量矩陣及其逆矩陣,并可描述為
定義λAχ1,λAχ2為矩陣A的特征值.
定義函數ε(χ1,χ2,χ3):

其中χ1,χ2和χ3定位了矩陣κ,ρ元素的位置.
設 ξ 為任意常數,定義 δξχ2χ3:

其中r定位了向量δr(N,ξ)的位置.
則 eξA可以表述為

定義 ?1,?2和 ?3

定義函數Γrlq:

附錄A5
根據參數定義,同時考慮系統的開關頻率相對工頻頻率較高,設可以得出在第 l個平衡點的表達式為
同樣可以得出:

將(1)式對ia,ib分別求偏導,可以得出1,2)在第l個平衡點的表達式為

根據系統在第l個平衡點的雅克比矩陣(5),可以得出F3—F0的表達式為
[1]Barbosa P G,Braga H A C,Rodrigues M C B,Teixeira E C 2006 IEEE Trans.Power Electron.21 1116
[2]Twining E,Holmes D G 2003 IEEE Trans.Power Electron.18 888
[3]Hyosung K,Seung K S 2005 IEEE Trans.Power Electron.20 1169
[4]Escobar G,Valdez A A 2003 IEEE Trans.Ind.Electron.54 504
[5]Robert B,Robert C 2002 Int.J.Contr.75 1356
[6]Iu H H C,Robert B 2003 IEEE Trans.Circ.Syst.I 50 1125
[7]Robert B,Iu H H C,Feki M 2004 Int.J.Circ.Syst.Comp.I 50 1125
[8]Li M,Dai D,Ma X K 2008 Circuits Syst.Signal Processing 27 811
[9]Wang X M,Zhang B,Qiu D Y 2009 Acta Phys.Sin.58 2248(in Chinese)[王學梅,張波,丘東元2009物理學報58 2248]
[10]Aroudi A E,Rodriguez E,Orabi M,Alarcon E 2010 Int.J.Circ.Theor.Appl.10 627
[11]Hiroyuki A,Takuji K 2010 Int.J.Circ.Theor.Appl.21 985
[12]Lei B,Xiao G C,Wu X L,Qi Y R 2011 Acta Phys.Sin.60 090501(in Chinese)[雷博,肖國春,吳旋律,齊元瑞2011物理學報60 090501]
[13]Lei B,Xiao GC,Wu X L 2012 Acta Phys.Sin.61 090501(in Chinese)[雷博,肖國春,吳旋律2012物理學報61 090501]
[14]Tse C 2003 Complex Behavior in Switching Power Converters(Boca Raton,CRC)p59
[15]Moler C,Loans C V 1978 Siam.Rev.20 801
[16]Wang F Q,Zhang H,Ma X K 2010 IEEE Trans.Circ.Syst.I 57 405
[17]Wang F Q,Zhang H,Ma X K 2008 Acta Phys.Sin.57 1522(in Chinese)[王發強,張浩,馬西奎2008物理學報57 1522]
[18]Zhang X T,Ma X K,Zhang H 2008 Acta Phys.Sin.57 6174(in Chinese)[張笑天,馬西奎,張浩2008物理學報57 6174]
[19]Zhang Y,Zhang H,Ma X K 2010 Acta Phys.Sin.59 8432(in Chinese)[張源,張浩,馬西奎2010物理學報59 8432]
[20]Viecelli J A 1971 J.Comput.Phys.8 119
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44