機械行波傳動器理論建模與實驗研究
2013-12-05 06:57:12宋瑞銀蔡炳清張向陽周敏瓏
中國機械工程 2013年23期
宋瑞銀 蔡炳清,2 張向陽,2 周敏瓏,2
1.浙江大學寧波理工學院,寧波,315100 2.太原科技大學,太原,030024
0 引言
行波是一種質點上下振動同時波形又向固定方向移動的一種波形,其驅動機理在很多文獻中已有闡述,其應用主要集中于超聲波電機中[1-3]。本文提出一種全新原理的傳動機構,它利用機械驅動激波發生器產生行波,利用行波驅動從動機構運動的原理實現傳動,其結構相對簡單,可靠性強,可用于大傳動比、微機電系統等一些特殊要求的場合。本文建立了該行波傳動器的理論模型,并進行了初步實驗分析。
1 行波傳動器的結構原理

圖1 行波傳動機構結構原理圖

圖2 激波發生器斷面圖
機械行波傳動器的結構原理如圖1所示,主要包含輸入軸、輸出軸、激波發生器等,核心在于由彈性應變層5和由周期性間隔的滾柱4構成的激波發生器。激波發生器斷面如圖2所示,為圓環狀,也可設計為圓錐狀或圓柱狀。應變層與輸入軸滾柱的接觸面光滑,而輸出軸內圈涂有一層摩擦材料,以保證彈性應變層與輸出軸接觸面間有較大的摩擦因數。輸入軸轉動時,將帶動滾柱轉動,圓環狀的彈性應變層在受到滾柱徑向擠壓后,彈性體將向滾柱兩側變形(圖3a),當滾柱離開彈性體接觸點后,彈性體將回彈(圖3b),從而使彈性體內部質點沿著環面形成拉伸-壓縮-拉伸的周期性往復運動并使環面質點沿徑向振動。同時考慮沿著周向連續的轉動,振動形成行波,則在彈性體內的質點將形成橢圓狀的質點運動,進而驅動輸出軸運動。

圖3 激波發生器行波形成機理
將傳動機構彈性體的中性層沿圓周展開,形狀如圖4所示,它反映了彈性應變層產生行波的形狀和彈性應變層質點的運動軌跡,和輸出軸接觸的一系列質點運動軌跡呈橢圓狀[4-7]。圖4中,假設行波右行,質點的橢圓運動軌跡為逆時針。彈性應變層質點在行波驅動下會產生橢圓振動,設圖中質點處于行波波峰點即橢圓振動最高點時,其波動速度水平向左,在一定的預緊力條件下,彈性應變層質點的水平運動將對輸出軸產生摩擦驅動力,由此帶動輸出軸向左運動,反之亦然。

圖4 彈性體表面質點的橢圓運動軌跡
2 行波傳動機構的理論建模
如圖4所示,將彈性體沿圓周方向展開后,接觸模型就變為平面二維問題。P0、P分別為彎曲變形前后的點,彎曲變形后的彎曲角為θ,則從P0到P沿厚度方向的橫向振動位移為u。設彈性體厚度為h,輸入軸滾柱數目為 N,輸入軸轉速為n(r/min),在彈性體中性層上建立坐標系xz,則根據彈性體中性面的彎曲行波理論[5,8]可得P0到P的縱向振動位移w(x,t),其數學模型為


這里不考慮彈性層和輸出軸轉子間的滑動,則輸出軸轉子速度等于彎曲波波峰處質點的振動速度。對式(1)求偏導,得到彈性體質點縱向振動速度為

其中,h0=h/2,表示彈性體表面處的質點位置為橢圓運動軌跡最高點。式(2)中負號表示彈性層表面質點運動到波峰處時的運動方向正好與行波方向相反。



圖5 轉子的速度波形圖
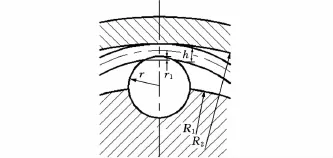
圖6 傳動器部分零件尺寸
由圖3可知,滾子對彈性體的最大擠壓變形量即為彈性體的振幅,即r1=A。將輸入軸的轉速換為彈性體中性層的線速度vi,有

設輸入軸和輸出軸之間的預緊力為F,則單個滾子所受的法向預緊力為Fc=F/N。
彈性體受到剛體滾子擠壓的變形量為r1(r1=A),設彈性體的彈性模量為E,圓柱滾子長度為B(也為彈性層有效接觸寬度),則擠壓接觸面積為

將式(5)代入應力計算公式,并考慮到擠壓變形量較小,加以化簡后可得到接觸層受的應力為

在一個波長周期內,接觸層的應變可近似表示為[9-10]

式中,2L為輸入輸出軸在一個波長內的接觸長度。
取應變在正半周期的平均值,得到在有效推動時的應變平均值為

由應力應變的關系式σc=Eεc,并考慮到振動幅值r1值相對r較小,將該式(7)化簡(求解時去掉四次方的未知量),得到擠壓變形量和法向預緊力間的關系為

將式(8)代入總傳動比公式,化簡得到:

可見,傳動器總傳動比與彈性層厚度、彈性體材料、預緊力、輸入軸(輸出軸)半徑、滾柱數目、滾子半徑、振幅等均有關系。
3 測試模型及平臺搭建
在前述的機械行波傳動理論模型基礎上設計了一套機械行波傳動測試裝置,如圖7所示。測試裝置中,由驅動電機驅動輸入軸轉動,轉速由轉速傳感器測量,輸入軸轉動帶動機械激波發生器轉動,進而使彈性應變層產生機械行波。為便于觀察和測試,這里將原設計的輸出軸用直線移動尺代替。彈性層產生機械行波后,直線移動尺將產生位移,位移通過位移傳感器測量得到。預緊力調節器為絲桿螺母副,通過旋轉螺母可調節直線移動尺和彈性層間的預緊力。

圖7 機械行波傳動測試裝置
4 實驗測試與分析
由理論模型可知,傳動器總傳動比與彈性層厚度、彈性體材料、預緊力、輸入軸及輸出軸半徑、滾柱數目、滾子半徑、振幅等均有關系。由于參數較多,實驗中,把彈性體材料、輸入軸及輸出軸半徑、滾柱數目、滾子半徑設為不變量,把彈性層厚度、預緊力作為可調變量進行實驗測試。為減小外界摩擦對位移的影響,這里采用了鋁質滑臺,與PP材料做的直線移動尺直接接觸。傳動測試裝置中,輸入軸半徑為20mm,滾珠數量為11個,均布在彈性層內圈,滾子半徑為1.8mm,滾子寬度為9mm,輸入軸轉速為136r/min,彈性應變層中性層的直徑為48.16mm。
4.1 彈性層厚度對傳動比影響測試
彈性層是機械行波產生的核心部件,這里加工了厚度分別為3mm、5mm、7mm和9mm的幾種彈性層。通過調節精密滾珠絲桿上的螺母來改變滑塊和彈性層間的預緊力。在實際測試中,調節絲桿高度,使彈性層與直線位移尺的接觸變形量在0.5mm,起始位置設定為零,每間隔30s記錄一次直線位移尺移動的距離s,測試中循環4次,取平均值,4種輸出位移曲線如圖8所示。由圖8可以看出,在彈性層厚度和預緊力確定后,直線移動尺移動速度基本保持恒定,減速比在401.7左右,這表明機械行波驅動器具有較大的傳動比。其次,從彈性層厚度對傳動比的影響來看,隨著彈性層厚度的增加,在210s內直線位移s從189mm降至150mm,這表明彈性層厚度對傳動比有一定的影響,但影響效果不明顯。
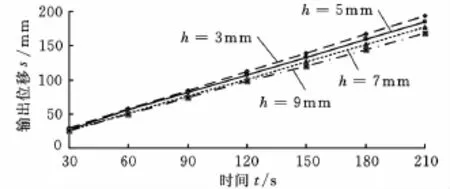
圖8 不同彈性層厚度時鋁塊的位移量
4.2 預緊力對傳動比的影響測試
通過調節絲桿上的螺母來調節直線位移尺和彈性層間的預緊力,設置每次的調節距離為0.5mm,選擇了3mm和5mm兩種厚度的彈性層作為實驗,得到傳動比i和彈性層變形量Δ的變化曲線,如圖9所示。

圖9 彈性層變形量與傳動比的關系
從圖9可以看出,隨著預緊力的增加(即彈性層變形量的增大),機構傳動比值呈下降趨勢;同時,隨著彈性層厚度的增加,傳動比呈下降趨勢,這與理論模型相符合。
5 結論
本文提出了一種新型的行波傳動機構,并在機構設計的基礎上進行了理論建模。借鑒國內外現有超聲波電機的研究理論和基礎,初步建立了總傳動比、輸出力矩、輸出功率等數學模型。在初步設計的基礎上設計并加工了測試用行波傳動機構。通過對傳動機構的測試,得到了行波傳動機構具有如下特點:可得到較大的傳動比,且結構相對簡單。實驗結果也初步證明了理論模型的正確性。
傳動器總傳動比與彈性層、預緊力、輸入軸(輸出軸)半徑、滾柱數目與半徑等多個參數有關,尤其是彈性層及摩擦層的材料等參數對傳動機構的機械性能影響較大。彈性層及摩擦層間存在較大功率損耗,這也導致傳動效率較低。為了得到總體的傳動機理等理論模型,主要從宏觀方面進行了假設和近似取值,更精確的理論模型有待從行波傳動的摩擦傳動的微觀摩擦機理進行進一步的研究。
[1]朱美玲,金龍,趙淳生.行波超聲馬達傳動機理的研究(一)——運動傳遞機理及定子中存在彎曲行波的條件[J].振動、測試與診斷,1996,16(4):7-14.Zhu Meiling,Jin Long,Zhao Chunsheng.Research on Transmission Mechanism of Piezoelectric Traveling Wave Ultrasonic Motors Part I:Mechanism of Motion Transmission and Conditions for the Existence of a Bending Traveling Wave in the Stator[J].Journal of Vibration,Measurement& Diagnosis,1996,16(4):7-14.
[2]Ueha S,Tomikawa Y.Ultrasonic Motors Theory and Applications[M].Oxford:Oxford Science Publication,1993.
[3]LeMoal P,Cudsin P.Optimization of Traveling Wave Ultrasonic Motors Using a Three-dimension Analysis of the Contact Mechanism at the Stator Rotor Interface[J].Eur.J.Mech.A/solids,1999,18:1061-1084.
[4]石斌.環形行波型超聲馬達的研究[D].南京:東南大學,2001.
[5]劉錦波.超聲波電機的數學模型及其驅動系統的研究[D].杭州:浙江大學,1998.
[6]胡敏強,金龍,顧菊平.超聲波電機原理與設計[M].北京:科學出版社,2005.
[7]Hagood N W,Mcfarland A J.Modeling of a Piezoelectric Rotary Ultrasonic Motor[J].IEEE LJFFC,1995,42(2):210-224.
[8]劉錦波,陳永校.超聲波電機定轉子接觸的摩擦傳動模型及實驗研究[J].中國電機工程學報,2000,20(4):59-63.Liu Jinbo,Chen Yongxiao.Investigation on Contact Model of Ultrasonic Motor and Its Experiments[J].Proceedings of the CSEE,2000,20(4):59-63.
[9]Maneo T,Tsukimoto T,Miyake A.Finite Element A-nalysis of the Motor/stator Contact in a Ring-type Ultrasonic Motor[J].IEEE Trans.on UFFC,1992,39(6):668-674.
[10]賀紅林,曾勁松,龍玉繁,等.行波超聲電機的運轉特性及其電學建模研究[J].中國機械工程,2011,22(14):1639-1644.He Honglin,Zeng Jinsong,Long Yufan,et al.Modeling of Operating Characteristics of Ultrasonic Motor Using Equivalent Circuit[J].China Mechanical Engineering,2011,22(14):1639-1644.
