基于領域知識的海上編隊線型隊形識別
2013-12-02 06:07:20冷畫屏關慶云吳曉鋒
艦船科學技術 2013年2期
冷畫屏,關慶云,吳曉鋒
( 海軍兵種指揮學院,廣東 廣州510430)
0 引 言
海上編隊在執行作戰任務時,通常采用一定的編隊隊形,如防空隊形、反潛隊形、護航隊形、掃雷隊形等,因此編隊隊形和目標機動類型[1-2]一樣,也是能揭示目標戰術意圖[3]的一種重要特征。目前國內外文獻已經有多種目標隊形識別算法,如基于Hough 變換的識別算法[4-5]、基于空間方向相似性的識別算法[6]、基于BP 神經網絡的識別算法[7]等,上述各種算法均取得了一定的識別效果,但均將編隊隊形作為一般的計算機圖形來進行處理,算法相對比較復雜。實際上,目標編隊隊形具有豐富的領域知識特征,本文將在充分分析這些領域特征的基礎上,提出一種簡易識別算法,用于計算機對目標線型隊形的自動識別。
1 海上目標基本隊形及其隊列要素
常用的海上目標線性隊形有單縱隊、單橫隊、雙縱隊、雙橫隊、方位隊、人字隊、楔形隊等,圖1 列出了海上目標的基本隊形。
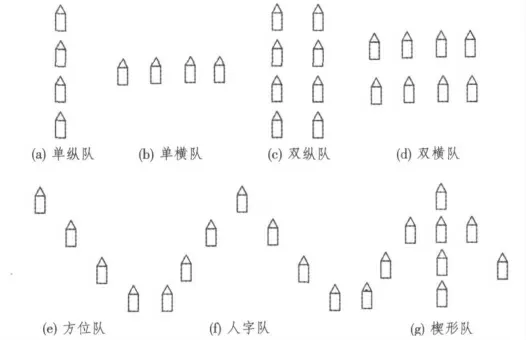
圖1 海上目標的基本隊形Fig.1 The basic formation of naval fleet
由圖1所示,編隊隊形的主要隊列要素包括:基準目標及其位置、隊形航向、隊列線數目、隊列方位。
1.1 隊形航向
所有線型隊形目標均有相同的航向和航速,這是海上目標線型隊形組成的圖像區別于其他幾何圖像的本質特征之一,同時,隊形航向也是其他線型隊形特征計算的基準之一。隊形航向可用FormTC表示。
1.2 基準目標
所有線性隊形均有1 至多個基準目標,該基準目標處于隊形航向之首,基準目標是隊形中其他目標保持其隊形位置的基準。
1.3 隊列線數目與隊列方位
隊列線是由基準目標開始,聯結隊列中各目標中心位置所在點形成的直線。海上目標線型隊形有1 條或數條隊列線,如圖1所示,單縱隊、單橫隊、方位隊有1 條隊列線,雙縱隊、雙橫隊、人字隊有2 條隊列線,楔形隊有3 條隊列線。隊列線數目可用表示。隊列方位是指隊列線與真北之間的夾角,按順時針從0° ~360°計算,可用FormTB表示。
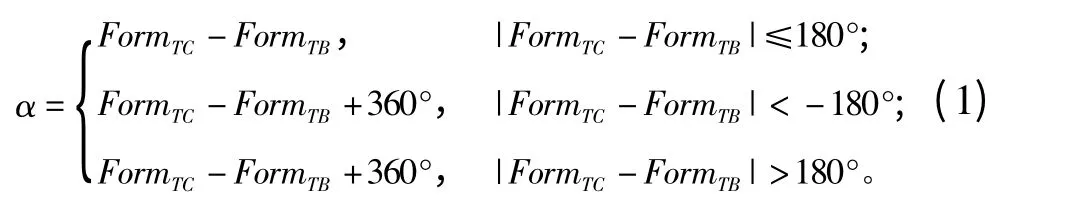
1.4 隊列角
隊列線與編隊航向之間的夾角,以基準目標向右(左)舷0° ~180°計算,有右、左舷別之分,用α 表示隊列角,則隊列角與隊形航向、隊列方位的關系為
2 海上目標隊形的特征及模板表示
由圖1所示隊形及其隊列要素可分析得出,海上編隊基本隊形的特征包括:①由1 條或多條隊列線組成,隊列線以基準目標為基準,基準目標位于以隊形航向之首或左側;②隊列線數目及各隊列角共同決定了隊形的類型。因此其隊形模板可用如下二元組表示:

其中:n 為隊列線的條數;αi為隊列角的大小。由此,可將圖1所示編隊基本隊形用隊形模板表示如下:單縱隊:{1,(180°)};單橫隊:{1,(90°)};方位隊:{1,{(α)},‖α|-γ| >5°;雙縱隊:{2,(180°,180°)};雙橫隊:{2,(90°,90°)};人字隊:{2,(α1,α2)},α1=α2,‖α1|-γ| >5°;楔形隊:{3,(α1,90°,α2)},α1=α3,‖α1|-γ| >5°;以上各模板表達中,γ=90°或180°。
3 海上目標隊形識別的主要計算模型和算法
在對隊形庫中的所有隊形按照式(2)所示模板進行編碼后,便可對實際觀測隊形進行模板匹配了。根據模板的特征,識別算法的關鍵是獲取觀測隊形的隊列線條數和各隊列角的大小,而隊列線條數和隊列角大小與隊形中基準目標個數、隊形航向及其他目標與基準目標的方位有關,下面詳述識別中的主要數學模型和識別算法。
3.1 坐標變換
隊列基準目標是隊形中其他各目標保持隊形的基準,行進過程中,其他各目標均向基準目標看齊,通常位于以編隊航向為基準的最前側或左側位置。作戰中目標坐標常以正北為y 軸,正東為x 軸,為了確定隊形中目標以編隊航向為基準的前、后、左、右的位置,需將坐標系旋轉到以編隊航向為y 軸,以其垂直方向為x 軸的新坐標系,然后根據其變換后坐標大小進行判斷。
令隊形中任一目標在作戰坐標系的坐標為(x,y),則其在以編隊航向FormTC為y 軸的新坐標系(本文稱模板坐標系)中的坐標為:

以下討論均在坐標變換后的模板坐標系中進行。
3.2 基準目標的選取和個數確定
由圖1 可分析得出,隊形基準點的個數和位置有2 種情況。一類是隊形中存在單個基準點,該基準點通常居于隊首,其他目標以其為基準,分布的各隊列線上,根據隊列線條數和隊列角的大小可識別出相應的隊形。第二類存在2 個或多個基準點和2 個或多個基準點為基準的隊列線。
通過比較隊形中目標各點軸坐標或值大小可區分以上2 類情況。
如圖2所示,當隊形中目標點(x1,y1),(x2,y2),滿足

時,可認為2 點位于平行于X 軸的直線或位于平行于Y 軸的直線上,其中δ 是設定的1 個較小的值,其大小與隊列中目標與基準點看齊時的角誤差有關,若用雷達看齊,設雷達最大測角誤差為Δ,則δ=tgΔ。通過以下步驟可區分隊形存在多個基準點的情況。
1)搜索首個基準點坐標(x0,y0),其中y0=min(y1,y2,…,yn);
2)統計其他目標點坐標與基準點之間符合式(4)或式(5)的目標點個數,分別為p1,p2,若p1≥1 且p1≥p2則為橫隊,其中p2=0 時為單橫隊,p2=1 時為雙橫隊,否則稱p2+1 列橫隊,若p2>1 且p1<p2為縱隊,隊形名稱與以上類似。若p1=0,則屬于存在單個基準點的情況。
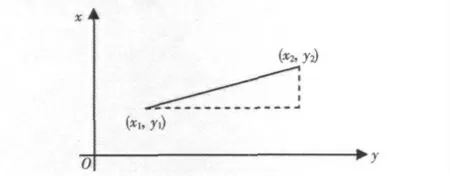
圖2 隊形中兩目標點關系的判斷Fig.2 The judgment of relation between two target′s points in the formation
3.3 隊形中其他目標點相對基準點的隊列方位計算
設隊形中基準點坐標(x0,y0),隊形中其他目標坐標為(xi,yi),令Dx=xi-x0,Dy=yi-y0,若Dy≠0,令

式中:當Dy>0 時,s=1;否則,s=-1。則目標相對基準點的方位
若Dy=0,則

上述目標方位單位為(°)。
3.4 目標是否位于同一隊列線的判斷
確定基準點后,若有多于或等于2 個目標點與基準點位于同一方位線上,則這些目標點與基準點共一條隊列線,因此,只要多個目標點相對基準點的方位差值較小,則可判斷此多目標點與基準點位于同一隊列線。
2 方位角TBi,TBj之間的差值計算為
3.5 隊形識別算法
步驟1:按3.1 所述進行坐標變換,下述步驟均在模板坐標系中進行;
步驟2:按3.2 所述選取基準點目標,確定基準點個數,按3.2 所述識別橫隊和縱隊。若識別為橫隊或縱隊,則隊形識別結束,否則轉步驟3。
步驟3:根據式(6)、式(7)和式(8)計算其他目標相對基準點的方位TB1,TB2,…,TBm-1,其中m 為目標個數;
步驟4:對TBi,i=1,2,…,m-1 進行聚類分析,2 方位角TBi,TBj之間的相似性度量值d(TBi,TBj)按式(9)計算。聚類分析[8]步驟如下:
①取TB1為第1 個聚類中心;
②選取TBj,TBj與TB1距離最大,即d (TB1,TBj)=max[d (TB1,TBk)],i=2,…,m-1;若d(TB1,TBj)<δ,δ 為雷達最大測角誤差,則所有目標在同一隊列線上,聚類結束,轉⑤,否則將TBj作為第2 個聚類中心,轉③;
③按式(9)計算除聚類中心外每個方位值至多個聚類中心的距離值,在每個方位值至多個聚類中心的距離值中,取其中較小者,令其為Dxi,得到最小距離值序列{Dxi};
④從{Dxi}中挑出最大值,若該值大于δ,則增加其為聚類中心,轉③,若不滿足該條件,則聚類結束。
⑤聚類中心個數即隊列線條數,按式(1)計算每條隊列線的隊列角。
步驟5:根據隊列線條數和隊列角大小進行模板匹配,識別隊形。
4 結 語
目標隊形是指揮員指揮決策中對目標進行戰術意圖識別的重要依據之一,將上述目標隊形的識別算法編制成計算機程序,并對實際隊形進行識別仿真,發現文中所列隊形均能進行正確識別。然而,本文所列算法僅能對線型隊形進行識別,對非線型隊形的識別將在下一步工作中進一步探討。
[1]冷畫屏,吳曉鋒,余永權.水面目標機動類型的識別研究[J].艦船科學技術,2007,29(4):52-54.
LENG Hua-ping,WU Xiao-feng,YU Yong-quan.Study on surface ship maneuvering type recognition[J].Ship Science and Technology,2007,29(4):52-54.
[2]冷畫屏,吳曉鋒,王慕鴻.空中目標戰術機動類型的實時識別[J].火力與指揮控制,2011,36(1):64-66.
LENG Hua-ping,WU Xiao-feng,WANG Mu-hong.Realtime recognition of air target t tactical maneuver type[J].Fire Control & Command Control,2011,36(1):64-66.
[3]冷畫屏,吳曉鋒,胡劍光.海上目標戰術意圖序貫識別技術[J].系統工程與電子技術,2008,30(3):29-31.
LENG Hua-ping,WU Xiao-feng,YU Yong-quan.Study on sequential recognition technique of marine targets′ tactical intentions[J].Systems Engineering and Electronics,2008,30(3):29-31.
[4]CARLOTTO M J.MTI data clustering and formation recognition[J].IEEE Transactions on Aerospace and Electronic Systems,1996,37(2):524-537.
[5]蔡益曹,張維明,賀玲,等.一種基于Hough 變換的線型群體隊形識別方法[J].國防科技大學學報,2006,28(2):124-129.
CAI Yi-chao,ZHANG Wei-ming,HE Ling,et al.Formation recognition based on hough transform[J].Journal of National University of Defense Technology,2006,28(2):124-129.
[6]董受全,宋偉.基于空間方向相似性的編隊隊形識別算法[J].火力與指揮控制,2010,35(11):167-169.
DONG Shou-quan,SONG Wei.Identification algorithm of combat warship formation based on similarity between spatial directions[J].Fire Control & Command Control,2010,35(11):167-169.
[7]樊延平,薛長松.基于BP 神經網絡的坦克分隊戰斗隊形識別研究[A].第七屆全國仿真器會議論文集[C],2010.226-229.
FAN Yan-ping,XUE Chang-song.Research on the Identification Model of Tank Element Battle Order Based on BP Neural Network[A].The Seventh National Conference on Simulator[C],2010.226-229.
[8]余旭初.模式識別與圖像分類[M].北京:解放軍出版社,2003.
YU Xu-chu.Pattern Recognition and Image Classification[M].Beijing:Chinese People′s Liberation Army Publishing House,2003.