自由擺平板系統(tǒng)高精控制設(shè)計(jì)
2013-12-01 10:08:52侯濤趙賀
自動化儀表 2013年1期
關(guān)鍵詞:檢測設(shè)計(jì)
侯濤趙賀
(蘭州交通大學(xué)自動化與電氣工程學(xué)院,甘肅 蘭州 730070)
0 引言
本文以2011年全國大學(xué)生電子設(shè)計(jì)競賽題目為背景,設(shè)計(jì)并制作了一個(gè)自由擺平板控制系統(tǒng)。其結(jié)構(gòu)是將擺桿的一端通過轉(zhuǎn)軸固定在一支架上;另一端固定安裝一臺電機(jī),并將平板固定在電機(jī)轉(zhuǎn)軸上。當(dāng)擺桿擺動時(shí),驅(qū)動電機(jī)可以控制平板自由轉(zhuǎn)動。
系統(tǒng)的基本要求是:通過控制電機(jī),使平板可以隨著擺桿的擺動而旋轉(zhuǎn)3~5個(gè)周期;擺桿擺動一個(gè)周期平板旋轉(zhuǎn)一周,偏差絕對值不大于45°;用手推動擺桿至30°~60°之間的角度θ,在平板中心穩(wěn)定放置1枚或8枚1元硬幣,啟動后放開擺桿讓其自由擺動;在擺桿擺動過程中,要求硬幣不從平板上滑落。
在平板上固定一激光筆,光斑照射在距擺桿150 cm距離處垂直放置的靶子上。當(dāng)擺桿垂直靜止且平板處于水平時(shí),調(diào)節(jié)靶子高度,使光斑照射在靶紙的某一條線上,標(biāo)志此線為中心線。手動推動擺桿至30°~60°之間的角度θ,啟動后,系統(tǒng)應(yīng)在15 s內(nèi)控制平板并盡量使激光筆照射在中心線上,完成后以LED指示。
1 系統(tǒng)整體方案設(shè)計(jì)
充分利用各模塊的優(yōu)勢,最終設(shè)計(jì)的系統(tǒng)結(jié)構(gòu)框圖如圖1所示。

圖1 系統(tǒng)結(jié)構(gòu)框圖Fig.1 Structure of the control system
該自由擺平板控制系統(tǒng)由數(shù)據(jù)采集模塊、調(diào)理電路模塊、步進(jìn)電機(jī)驅(qū)動模塊和LED顯示模塊等部分構(gòu)成。系統(tǒng)通過光電編碼器的檢測獲得自由擺的轉(zhuǎn)角[2-5],通過算法程序換算得到平板應(yīng)該轉(zhuǎn)動的方向與角度,并產(chǎn)生相應(yīng)的控制量;通過驅(qū)動模塊使步進(jìn)電機(jī)轉(zhuǎn)動[6-7],從而帶動平板轉(zhuǎn)動,達(dá)到平板的平衡狀態(tài)。然而,此處的控制是開環(huán)控制,無法獲知電機(jī)轉(zhuǎn)動是否達(dá)到期望角度,因此,需增加另一路檢測。在此,采用角度傳感器[8]檢測轉(zhuǎn)動后的實(shí)時(shí)角度,再將該角度值反饋到控制器進(jìn)行比較,形成閉環(huán)控制。
2 伺服閉環(huán)控制設(shè)計(jì)
2.1 基本部分建模與設(shè)計(jì)
伺服閉環(huán)控制基本部分的設(shè)計(jì)要求是在擺桿自由擺動過程中,控制平板保持平衡狀態(tài),使硬幣不從平板上滑落。
由自由擺系統(tǒng)原理可知,控制平板狀態(tài)要保持平衡,即擺桿擺動多少角度,平板就需要轉(zhuǎn)動相應(yīng)角度。平板平衡示意圖如圖2所示。光電編碼器作為檢測裝置安裝在與擺桿固定點(diǎn)同軸方向,用于檢測擺桿轉(zhuǎn)動的角度。
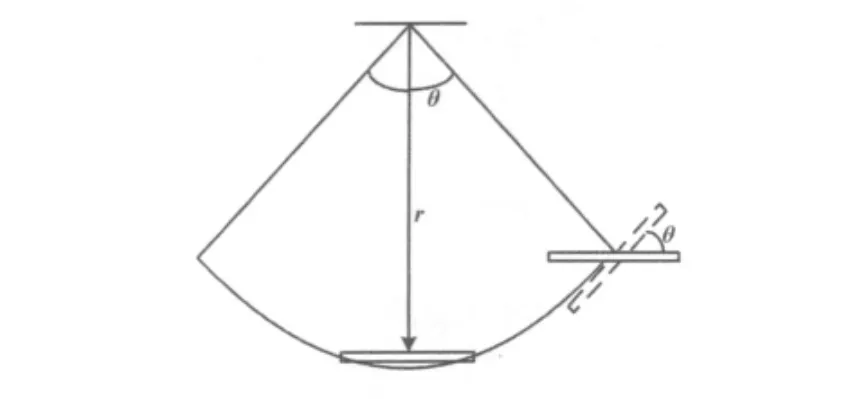
圖2 平板平衡示意圖Fig.2 Schematic of the balancing of flat panel
為了提高控制精度,還需設(shè)計(jì)另一路角度傳感器檢測,用于檢測平板實(shí)時(shí)轉(zhuǎn)動的角度。角度傳感器與平板平行安裝,并可隨平板一起轉(zhuǎn)動,將檢測角度反饋到控制器進(jìn)行比較,從而形成伺服閉環(huán)的高精度角度控制[9]。
角度傳感器的原理是根據(jù)角度的變化輸出相應(yīng)的電壓變化(0~5 V),其平衡位置值為1650 mV,得到輸出電壓與角度的關(guān)系式為:

式中:Vout為速度傳感器的電壓輸出值;k為近似的線性對應(yīng)系數(shù);θ為傾斜角度。
因此,傾斜角度可以通過下式計(jì)算得到:

通過分析角度傳感器的輸出電壓值可知,當(dāng)θ在-60°~+60°的范圍內(nèi)變化時(shí),其輸出電壓變化范圍為930~2330 mV,可計(jì)算得到k=800。
2.2 發(fā)揮部分建模與設(shè)計(jì)
伺服閉環(huán)控制的發(fā)揮部分要求是激光筆在擺桿自由擺動的過程中,照射在靶子上的光斑始終位于靶子的中心線上。根據(jù)自由擺擺動時(shí)平板運(yùn)動的狀態(tài),可得到激光筆定位模型圖,其示意圖如圖3所示。
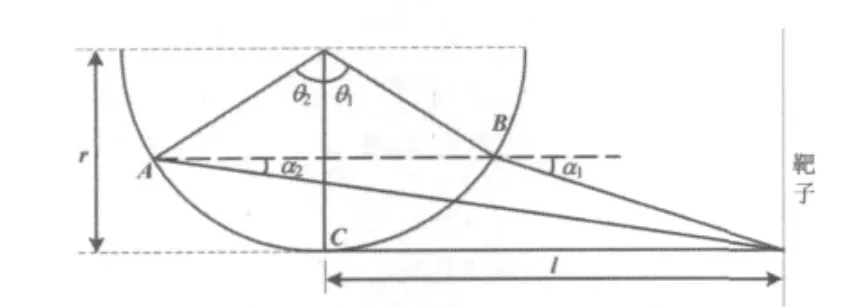
圖3 激光筆定位模型圖Fig.3 The positioning model of laser pen
通過分析擺桿擺動的角度和平板相對水平方向的轉(zhuǎn)動角度,建立數(shù)學(xué)方程式;然后通過算法實(shí)現(xiàn)擺桿運(yùn)動過程中步進(jìn)電機(jī)的精確控制[10]。
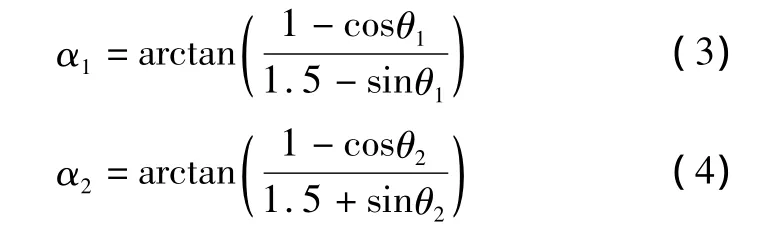
已知參數(shù) r=1 m、l=1.5 m,可得 α1、α2,具體的計(jì)算方法如式(3)、式(4)所示:
2.3 伺服閉環(huán)控制實(shí)現(xiàn)
根據(jù)上文分析可知,若想提高控制精度,需采用雙傳感器技術(shù)。其中,光電編碼器用來檢測自由擺的擺角,角度傳感器用來檢測平板的轉(zhuǎn)角,且轉(zhuǎn)角控制采用伺服閉環(huán)控制,其控制框圖如圖4所示。
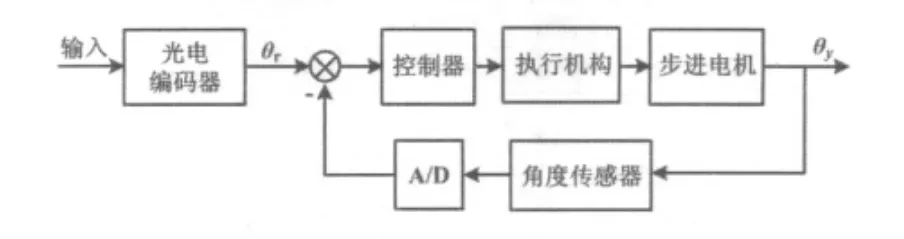
圖4 平板角度閉環(huán)控制框圖Fig.4 Block diagram of the closed-loop control for flat panel angle
具體控制程序流程圖如圖5所示。
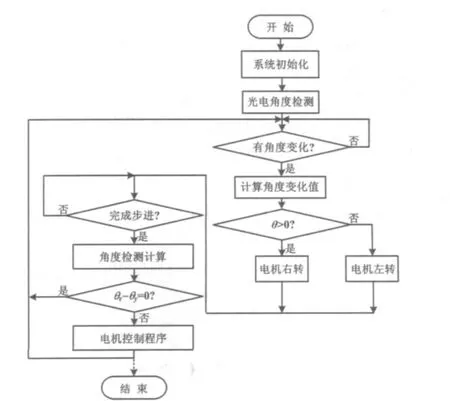
圖5 控制程序流程圖Fig.5 Flowchart of the control program
3 測試結(jié)果與分析
3.1 測試結(jié)果
平板旋轉(zhuǎn)角度控制與放置1枚硬幣平板的平衡狀態(tài)控制較簡單,測試結(jié)果較理想,與單一傳感器控制(最早按單一角度傳感器設(shè)計(jì))沒有明顯區(qū)別。但對于放置8枚硬幣平板的平衡狀態(tài)控制,雙傳感器優(yōu)勢明顯,單雙傳感器對比測試結(jié)果如表1所示。
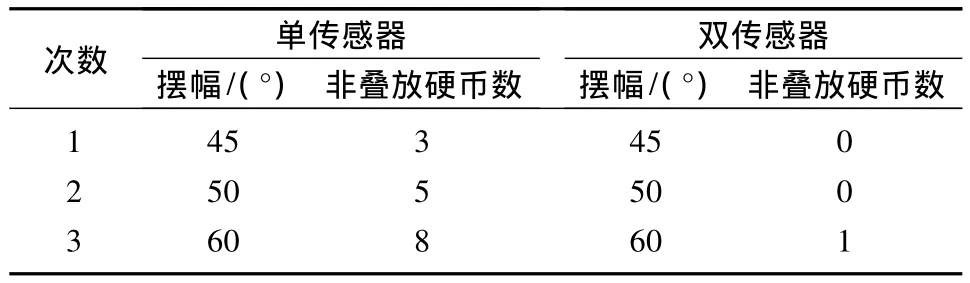
表1 基本部分測試對比表Tab.1 Intercomparison of tests for essential part
發(fā)揮部分啟動后平板的平衡狀態(tài)對比測試結(jié)果如表2所示。
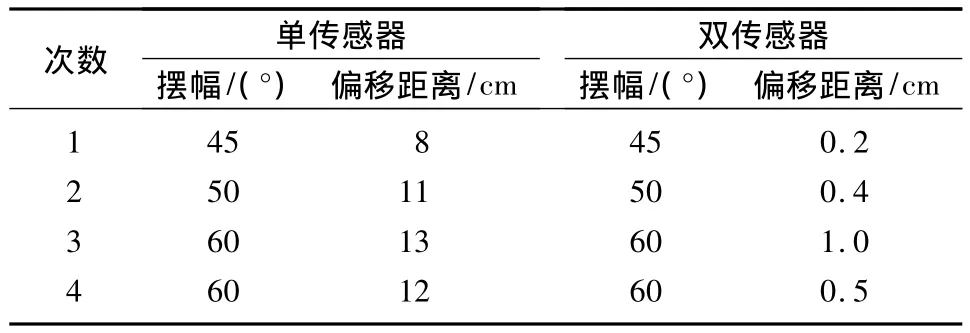
表2 發(fā)揮部分測試對比表Tab.2 Intercomparison of tests for exerted part
3.2 測試分析
根據(jù)測試結(jié)果可知,單傳感器測試的誤差較大,雙傳感器設(shè)計(jì)具有很高的精度。究其原因是由于單傳感器是開環(huán)控制,而雙傳感器是伺服閉環(huán)控制,所以精度高。但在測試過程中,步進(jìn)電機(jī)偶爾會發(fā)生抖動,硬幣容易滑落。大量分析表明,步進(jìn)電機(jī)執(zhí)行過程中產(chǎn)生的擾動容易造成傳感器輸出不穩(wěn)定。其解決方法是把傳感器安裝在離電機(jī)較遠(yuǎn)而又能保持與平板平行的位置,即在擺桿的中上部水平安裝。測試結(jié)果表明,該方法較好地滿足了設(shè)計(jì)要求。
4 結(jié)束語
根據(jù)控制要求,設(shè)計(jì)了雙傳感器伺服閉環(huán)控制方法。該方法實(shí)現(xiàn)了高精度控制。由于步進(jìn)電機(jī)偶爾會發(fā)生抖動,雖然進(jìn)行了分析處理,但精度和準(zhǔn)確度仍有待進(jìn)一步提高。下一步工作將用直流電機(jī)代替步進(jìn)電機(jī)進(jìn)行設(shè)計(jì)研究。
[1]朱秀梅.基于Cortex-M3+ARM的自由擺平衡控制系統(tǒng)的研究[D].南京:東南大學(xué),2010.
[2]李擁軍,楊文淑.光電編碼器測速算法的IP核設(shè)計(jì)[J].長春理工大學(xué)學(xué)報(bào):自然科學(xué)版,2008,31(3):35-37.
[3]侯濤,范多旺.基于增量式光電編碼器的高精數(shù)字測速應(yīng)用研究[J].自動化與儀器儀表,2010(6):9-10,14.
[4]肖本賢.一種提高轉(zhuǎn)速測量范圍與精度的新方法[J].自動化儀表,1997,18(11):21-23.
[5]谷海濤,顏湘武,曲偉.正交解碼電路和捕獲單元在轉(zhuǎn)角和轉(zhuǎn)速測量中的應(yīng)用[J].電氣應(yīng)用,2005,24(1):113-115.
[6]牛宏俠,侯濤.一種提高智能賽車速度和平穩(wěn)性的方法[J].兵工自動化,2011,30(3):72,85.
[7]牛宏俠.基于拉格朗日方程的小車蹺蹺板狀態(tài)反饋控制研究[J].蘭州交通大學(xué)學(xué)報(bào):自然科學(xué)版,2008,27(4):99-101.
[8]吳秀芹,高國偉,李倩蕓,等.傾角傳感器自動標(biāo)定系統(tǒng)的研究[J].傳感器與微系統(tǒng),2009,28(4):54-55.
[9]張莉,朱海洋.混合模糊控制器在伺服控制系統(tǒng)中的應(yīng)用[J].自動化儀表,2010,31(6):21-23.
[10]原立家,祝連慶,董明利.高精度的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)[J].北京機(jī)械工業(yè)學(xué)院學(xué)報(bào),2006,21(1):47-48,57.
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16