可變形翼戰術導彈LPV增益調度控制
2013-11-04 03:05:58張公平段朝陽廖志忠
飛行力學 2013年6期
關鍵詞:模型
張公平, 段朝陽, 廖志忠
(中國空空導彈研究院 制導控制系統研究所, 河南 洛陽 471000)
可變形翼戰術導彈LPV增益調度控制
張公平, 段朝陽, 廖志忠
(中國空空導彈研究院 制導控制系統研究所, 河南 洛陽 471000)
在導彈飛行過程中,彈翼變形會導致快變氣動與多體運動耦合。為了精確描述導彈變翼飛行的時變特性,基于質點系動量及動量矩理論,建立了變翼導彈非線性多體動態模型,并通過狀態變換法,將其轉換為線性參變動力學模型。利用改進的D-K迭代算法,設計了軸對稱變翼導彈的LPV增益調度控制器。通過非線性聯合仿真,驗證了LPV魯棒控制器對組合變翼擾動具有良好的控制品質及魯棒性,能勝任較大空域的變翼穩定與控制。
變形翼; 戰術導彈; 多體動力學; 增益調度控制
0 引言
為充分發揮導彈遠程威懾與靈活作戰的能力,在新的戰場形勢下,軍方對攻擊機動目標導彈的射程及機動性提出了新的、更高的要求,從而促使導彈研究領域的專家們不斷推陳出新。
國內外學者曾提出并開展了多項概念新穎的可變外形導彈的研究。例如,英國Cranfield大學的偏轉彈頭研究,證實了由彈頭偏轉引起的非對稱布局可以大幅度提高導彈的機動性[1]。美國Raytheon公司的新概念導彈通過對稱變翼展提高了“戰斧”巡航導彈的最大射程[2]。2008年,Matthew等通過實驗研究了一種機載斜置翼導彈的氣動特性,驗證了彈翼適當斜置有利于減小阻力、增加射程;實驗結果還表明,機彈分離時,該斜置翼導彈在較大的機翼后掠角范圍內具有良好的靜穩定性[3]。2008年,Matthew將導彈的結構動力學方程與N-S方程相結合,采用重疊網格生成技術,對彈翼斜置時的氣動彈性效應進行了高可靠度的數值模擬[4]。在飛行力學與控制領域,Jae-Sung Bae等的研究表明,非對稱變翼展具有很強的橫滾控制能力,可取代傳統控制面用于橫向控制[5]。近年來,有關變翼導彈的研究逐步深入,開始轉向變翼飛行控制問題的解決。如Sigler等將巡航導彈的可反對稱變翼展視為新型操縱面,通過擬合求導獲得氣動導數,并采用將滑模與反饋線性化相結合的方法設計了非線性控制器[6]。在國內,中國空空導彈研究院也開展了系統、深入的研究,為彈翼可變形的遠程空空導彈設計了線性魯棒控制器[7]。此外,西北工業大學針對變翼導彈的小擾動線化模型,分別設計了線性的PID和變結構控制器[8-9]。事實上,目前有關變翼導彈的控制器設計多是針對單剛體線性動態模型,將變翼擾動簡單地建模為一個固化的不確定參數,無法細致刻畫變翼擾動的可預測性及時變特性,最終導致設計出的控制器性能受限。
本文將充分考慮連續變翼對彈體動態特性的影響,采用狀態變換法構造變翼飛行的準線性化模型,并通過一類擴展功能的D-K迭代算法,對準線化模型的線性分式變換形式進行魯棒控制器設計與優化,以應對導彈高速、高機動飛行中快速變翼對飛行控制系統的復雜擾動。
1 變翼導彈線性參變動力學建模
定義彈翼固連坐標系如圖1所示。
圖中,Ciξi軸與翼根弦平行,指向彈頭為正;Ciζi與翼平面后緣線平行,向外指向為正。此外,坐標系Oξitηitζit為彈翼質心固連系Ciξiηiζi的平移坐標系,Ci為第i號可動彈翼的質心,χ為脊線后掠角,l為彈翼質心到根弦最大厚度點S的距離,點S在彈體縱軸上的投影點為C,其距彈頭尖端的距離為LC,彈體質心為Cb,距彈頭尖端的距離為Lb。若Xw,Zw分別為彈翼質心在彈體系下的位置,mw為單片彈翼的
質量,根據瞬時單剛體原理,多剛體運動的任意瞬時其質心運動方程與固定翼導彈類似[10-11],則由動量矩定理可得變翼導彈的轉動動態模型為:

考慮到彈體及變翼的軸對稱特性,通過縱向與側向運動分離,可得變翼導彈的縱向動力學模型為:


式中,Cz為附加轉動慣量。
令狀態變量為α和ωz,控制輸入為δz,則整理可得狀態方程為:
可見,變翼導彈的轉動動力學模型與固定翼導彈有所不同,主要表現為彈翼運動引起的附加慣性及隱含的快變氣動特性。為得到便于魯棒控制器設計的動態模型,可采用狀態變換法的基本思想將非線性系統狀態沿著一條平衡軌跡進行數學變換。進一步建立變翼導彈縱向短周期運動的LPV形式:
若采用過載控制,則定義輸出方程為:
事實上,只要簡化得當,且控制量維數與狀態變量x1的維數一致,則多變量運動模型的LPV建模就適用狀態變換法。
2 變翼導彈LPV模型的LFT實現
盡管變翼導彈LPV系統的系數矩陣是時變的,但通過LFT變換,可將其不確定性明確分離出來,如下式的標準LPV形式:


非零矩陣元素以線性分時變換的形式給出:
A22=Fu(MA,ΔA),B1=Fu(MB1,ΔB1)
B2=Fu(MB2,ΔB2),C1=Fu(MC,ΔC)
則LPV系統的LFT連接關系如圖2所示。
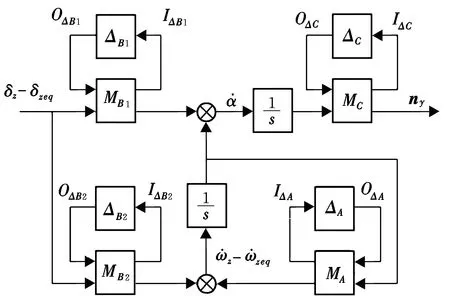
圖2 導彈LPV系統的LFT結構圖Fig.2 LFT structure of missile LPV system
圖中,不確定塊為ΔA,ΔB1,ΔB2,ΔC;確定性塊為MA,MB1,MB2,MC,進一步可得標稱系統的狀態空間形式為:
不確定性矩陣為:
可見,變翼導彈動態模型的時變部分可以通過不確定性Δ的形式從其標稱部分中分離出來,以便滿足魯棒控制器設計對動態模型形式的要求。
3變翼導彈LPV/μ綜合增益調度
控制
為實現變翼過程中導彈控制系統的增益自調度,可采用控制器與不確定性直連的結構,即Fl(K,Δ)為廣義控制器,可隨不確定參數Δ而變化,其等效的控制結構如圖3所示。
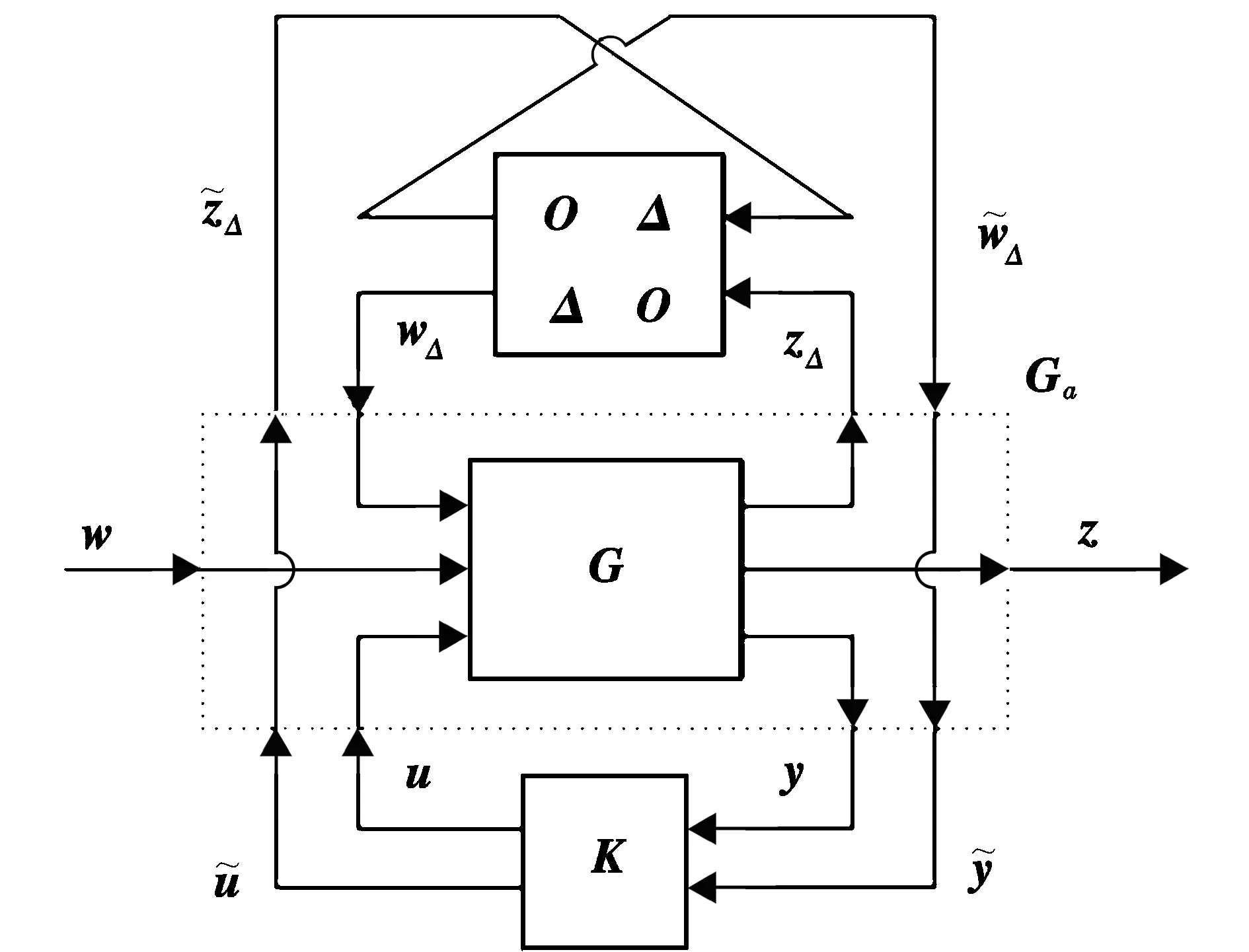
圖3 LPV增益調度控制結構圖Fig.3 Structure of LPV gain-scheduling control
則由w到z的閉環傳遞函數矩陣簡記為:
Τ(G,K,Δ)=Fl(Fu(G,Δ),Fl(K,Δ))
對變翼導彈而言,由于Δ包含的后掠角、翼展、迎角均可在線獲取,故由小增益定理可知,最終的控制問題就是求解矩陣K,使其對于滿足ΔTΔ<γ-2的所有變參數Δ,閉環系統內穩定,而且滿足條件
max‖T(G,K,Δ)‖∞<γ。
對變翼導彈所具有的快時變不確定特性Δ?Δ(重復不確定塊),需要先將其標度在有界實引理的適用范圍內。定義變翼導彈LPV系統的不確定塊對應的標度陣集合為:
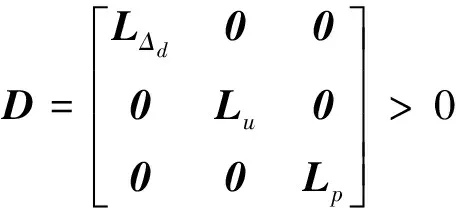
LΔd∈LΔ?Δ,Lu∈LΔu,Lp∈LΔp
則采用改進的D-K迭代算法可求得控制器K:
(1)初始化標度矩陣D=I;
(2)構造一個被標度的廣義被控對象:
(3)將被控對象轉化為GEVP要求的標準形式,并解得時變不確定塊LΔd;

(6)固定K及LΔd,重新構造一個凸優化問題:
minμ=
在每一個頻率點處求得使μ極小化的標量ld與矩陣Mu及Mp。
(7)在各頻率點處用ld標一化Mu及Mp,并根據標一化Mu及Mp各元素的增益特性擬合出Lu
和Lp。
(8)固定Lu和Lp,并再次更新標度陣D;
(9)重復步驟(2)~(8),直至μ不再減小。
4 非線性聯合仿真
仿真方法為基于氣動工程計算方法的有控飛行力學聯合仿真,該軟件可用于快速求解連續變翼過程中導彈的氣動特性與多體運動耦合問題,系統結構如圖4所示。
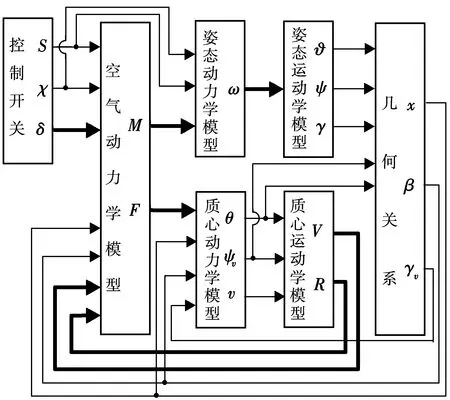
圖4 變翼導彈飛行動力學聯合仿真系統Fig.4 Collaborative simulation system of flight dynamics of morphing missile
圖中的控制關系與空氣動力學等模塊均不同于傳統導彈。控制關系模塊用于輸出變翼控制量至姿態動力學模塊,以耦合彈體旋轉角速度模擬慣性附加力矩,而輸入空氣動力學模塊的變翼控制量則主要用于在線計算全彈氣動特性。
仿真對象為美國的AMRAAM地空型導彈。變翼展速度為180 mm/s,變后掠速度為45 (°)/s,舵偏限幅為20°,限速為200 (°)/s。
分別取1~3號彈道點:(1 493.3 m,556.1 m/s),(5 298.5 m,629.8 m/s),(8 122 m,700.4 m/s),彈體在兩種變翼擾動作用下對方波加速度指令的跟蹤效果見圖5~圖7。
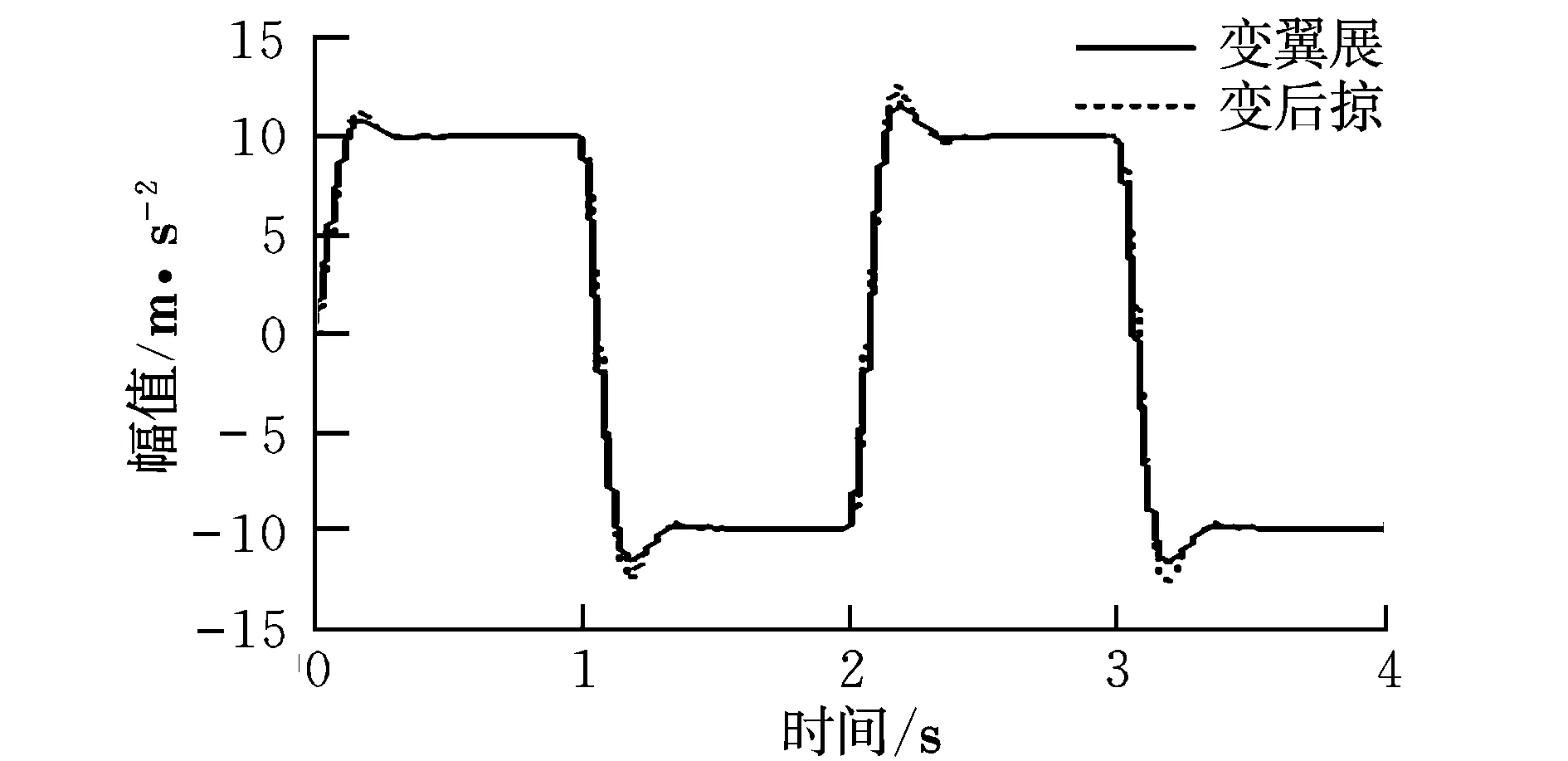
圖5 彈道點1的方波響應Fig.5 Missile response to square wave at ballistic point No.1
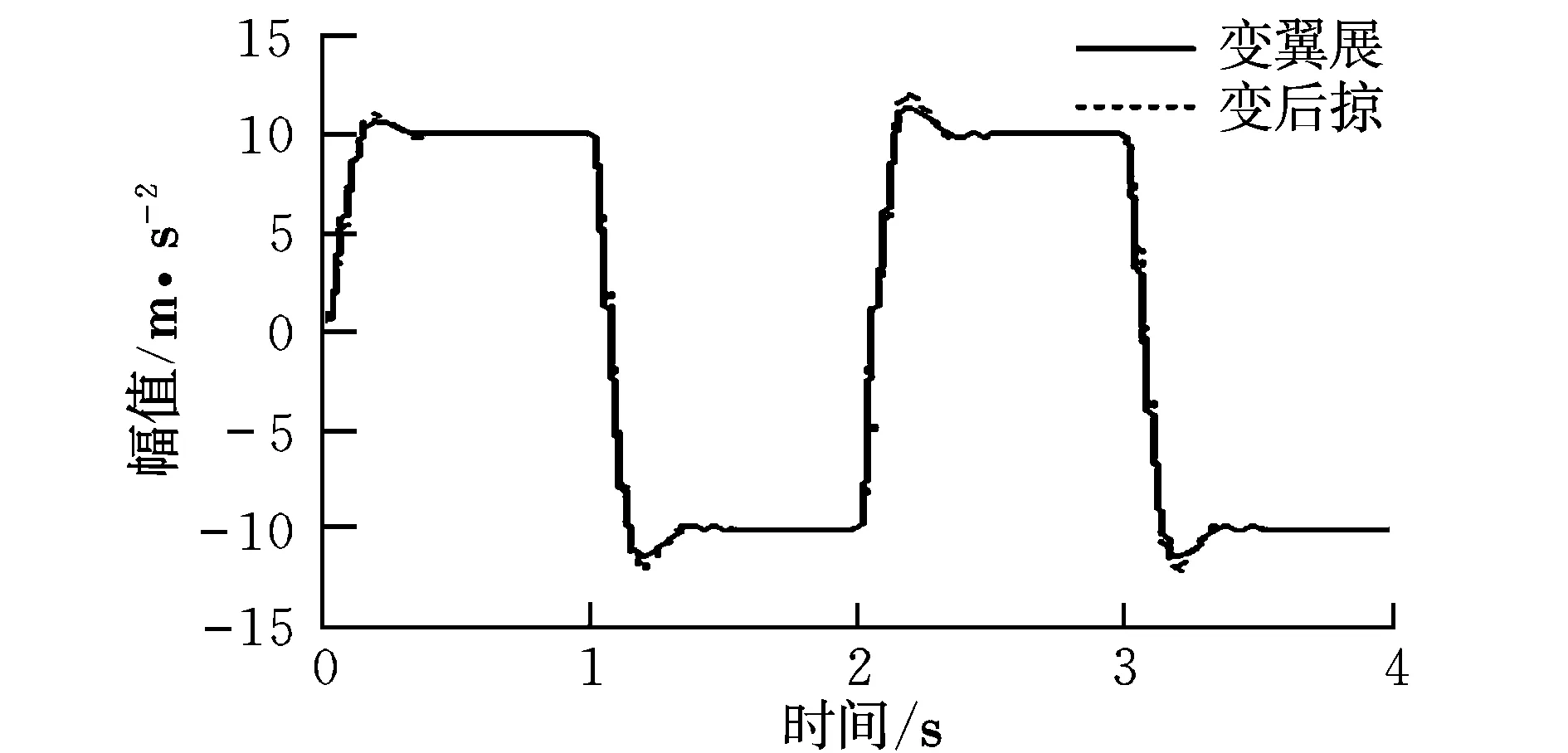
圖6 彈道點2的方波響應Fig.6 Missile response to square wave at ballistic point No.2
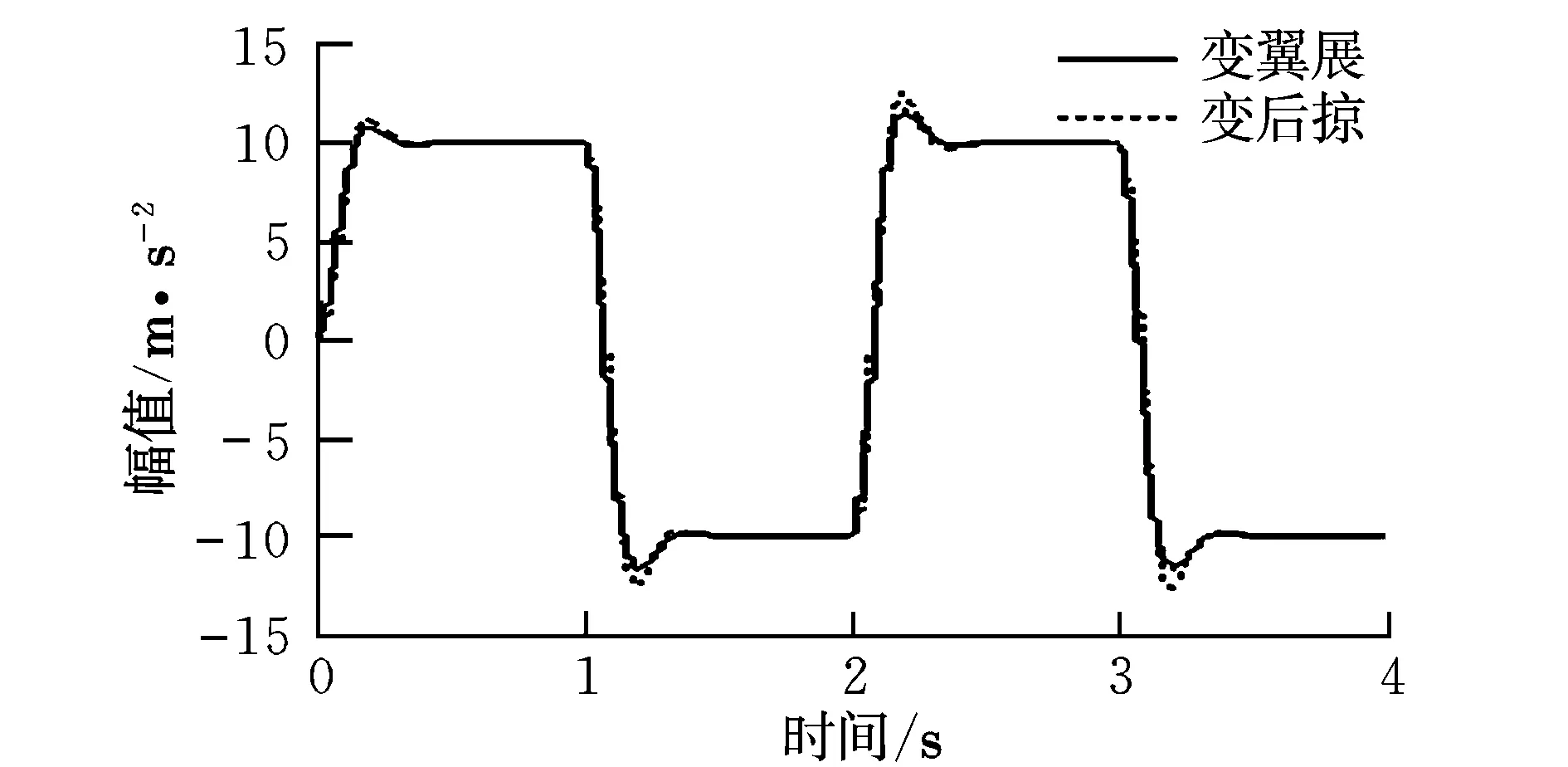
圖7 彈道點3的方波響應Fig.7 Missile response to square wave at ballistic point No.3
經測算,3個彈道點的方波響應時間均小于0.45 s,超調量在10%以內,穩態誤差為0。可見,通過LPV控制,變翼展及變后掠引起的擾動能得到有效抑制。LPV控制器能適用更廣的飛行包線,因為LPV控制器是可以隨對象動態時變的,具有自適應擾動和外界不確定的增益調度功能。相比之下,LPV控制器對變后掠的控制品質略低于變翼展形式,原因是彈翼變后掠時,后掠角與翼展是同時變化的,相應慣性和氣動特性變化幅度均較大,其對彈體擾動要強于變翼展。
5 結論
(1)采用狀態變換法能夠對變翼導彈的非線性模型進行準線性化,從而得到較精確的線性參變模型,其形式滿足LPV魯棒控制的要求,能夠充分體現變翼誘發的時變慣性及氣動不確定性。
(2)將變翼導彈LPV模型中變翼誘發的擾動建模為標稱系統的時變不確定性是可行的,所設計的自增益調度非線性控制器對快速變翼具有很強的魯棒性,能在更大的飛行包線內有效抑制復雜擾動,并實現對過載指令快速而穩定的跟蹤。
(3)針對導彈變翼連續氣動計算與動態模型的交叉求解難題,提出了一種非線性動力學聯合仿真方法,通過對不同變翼方式的操縱響應仿真,驗證了其有效性,能夠用于變翼導彈,甚至擴展用于其它類型變形飛行器的動力學與控制仿真。
[1] Meurnier M.Viscous CFD analysis of a deflected nose axisymmetric projectile at high speeds [D].Cranfield:Cranfield University,2005.
[2] Takahashi T T,Spall R J,Turner D C.A multi-disciplinary survey of advanced subsonic tactical cruise missile configurations[R].AIAA-2005-0709,2005.
[3] Matthew J Dillsaver,Milton E Franke.Wind tunnel study of oblique wing missile model [R].AIAA-2008-318,2008.
[4] Moti Karpel,Evgeny Selitrennik.Computational aeroelastic simulation of rapid morphing wing-body configuration [R].AIAA-2008-1898,2008.
[5] Bae Jae-Sung,Seigler T Michael,Inman Daniel J.Aerodynamic and aeroelastic considerations of a variable-span morphing wing[R].AIAA-2004-1726,2004.
[6] Seigler T Michael,Bae Jae-Sung,Inman Daniel J.Flight control of a variable span cruise missile [R].IMECE-2004-61961,2004.
[7] Duan Chao-yang,Guo Jian-guo,Zhou Jun.Autopilot design for missile with morphing wings [J].Advanced Computer Theory and Engineering,2010,6(1):520-523.
[8] 叢延.智能可變外形導彈的氣動外形總體設計研究[D].西安:西北工業大學,2007.
[9] 王旭剛,周軍.變后掠翼戰術巡航導彈動力學控制及仿真[J].計算機仿真,2008,25 (6):62-65.
[10] 錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2003:36-39.
[11] 張公平,段朝陽,廖志忠,等.可變形翼戰術導彈多體動力學特性[J].彈箭與制導學報,2011,6 (31):149-152.
LPVgain-schedulingcontroloftacticalmissilewithmorphingwings
ZHANG Gong-ping, DUAN Chao-yang, LIAO Zhi-zhong
(Guidance and Control System Department, China Airborne Missile Academy, Luoyang 471000, China)
In missile flight, changing wing’s shape will induce tight coupling of fast-varying aerodynamics and multi-body kinematics. Based on the theorem of momentum and angular momentum of particles system, a set of nonlinear multi-body dynamical model is developed to account for the time-varying characteristics of flight dynamics of morphing missile. The following linear parameter-variable form is deduced by means of states transformation. The improvedD-Kiterative algorithms are used to design LPV gain-scheduling controller for a typical axisymmetric missile with morphing wings. The nonlinear collaborative simulation demonstrates that the robust LPV controller has an excellent control quality and robustness and can be used to stabilize and control flight of morphing missile in large airspace.
morphing wing; tactical missile; multi-body dynamics; gain-scheduling control
TJ765
A
1002-0853(2013)06-0535-05
2013-03-18;
2013-06-18; < class="emphasis_bold">網絡出版時間
時間:2013-10-22 14:14
航空科學基金重點資助(2008ZA12001)
張公平(1982-),男,河南洛陽人,工程師,博士,研究方向為飛行動力學與控制。
(編輯:姚妙慧)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
