電液速度控制系統的自適應控制
2013-10-29 10:21:54王青林黃曼霞
湖北工程學院學報 2013年3期
王青林,黃曼霞
(1.商丘技師學院,河南 商丘476000;2.商丘職業技術學院,河南 商丘476000)
電液速度控制系統在實際工程控制系統中應用非常廣泛[1-3],如雷達天線控制系統、六自由度轉臺速度控制系統、火炮速度控制系統以及用穩定平臺速度控制系統等較大功率的控制系統中都采用電液控制系統[4]。速度控制系統的控制對象是系統的輸出速度。在電液速度控制系統中,通過速度傳感器,將系統的輸出速度反饋到系統輸入端,構成速度控制回路,如圖1所示。
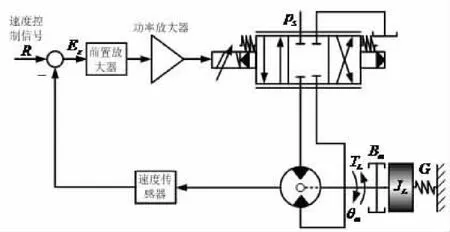
圖1 電液速度控制系統原理圖
液壓速度控制系統通常有液壓缸輸出速度控制系統和液壓馬達轉速控制系統,就液壓馬達轉速控制系統而言,電液速度控制系統的控制方式主要有閥控液壓馬達速度控制系統、泵控液壓馬達開環速度控制系統、泵控液壓馬達閉環速度控制系統和位置開環泵控液壓馬達閉環速度控制系統等典型的電液速度控制系統[5-7],其開環傳遞函數為:

由上式可知,該系統為零型有差系統,輸出速度偏差隨速度的增大而增大,這說明不能由位置系統簡單地用速度反饋來實現速度控制,會導致速度偏差的問題,甚至使系統變為不穩定或穩定裕量較小。
1 電液速度控制系統與希望模型
設某典型的電液速度控制系統,它的開環傳遞函數如式(1)所示。式(1)中:K0=20,ωh=165,ζh=0.1。
取滿足希望動態性能指標的希望模型的閉環傳遞函數為:


式中:Km=1,ωm=173.2,ζm=1.8764。
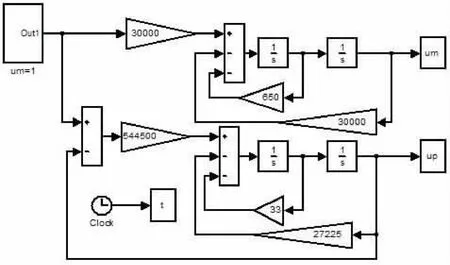
圖2 液壓速度控制系統及希望模型SIMULINK仿真模型
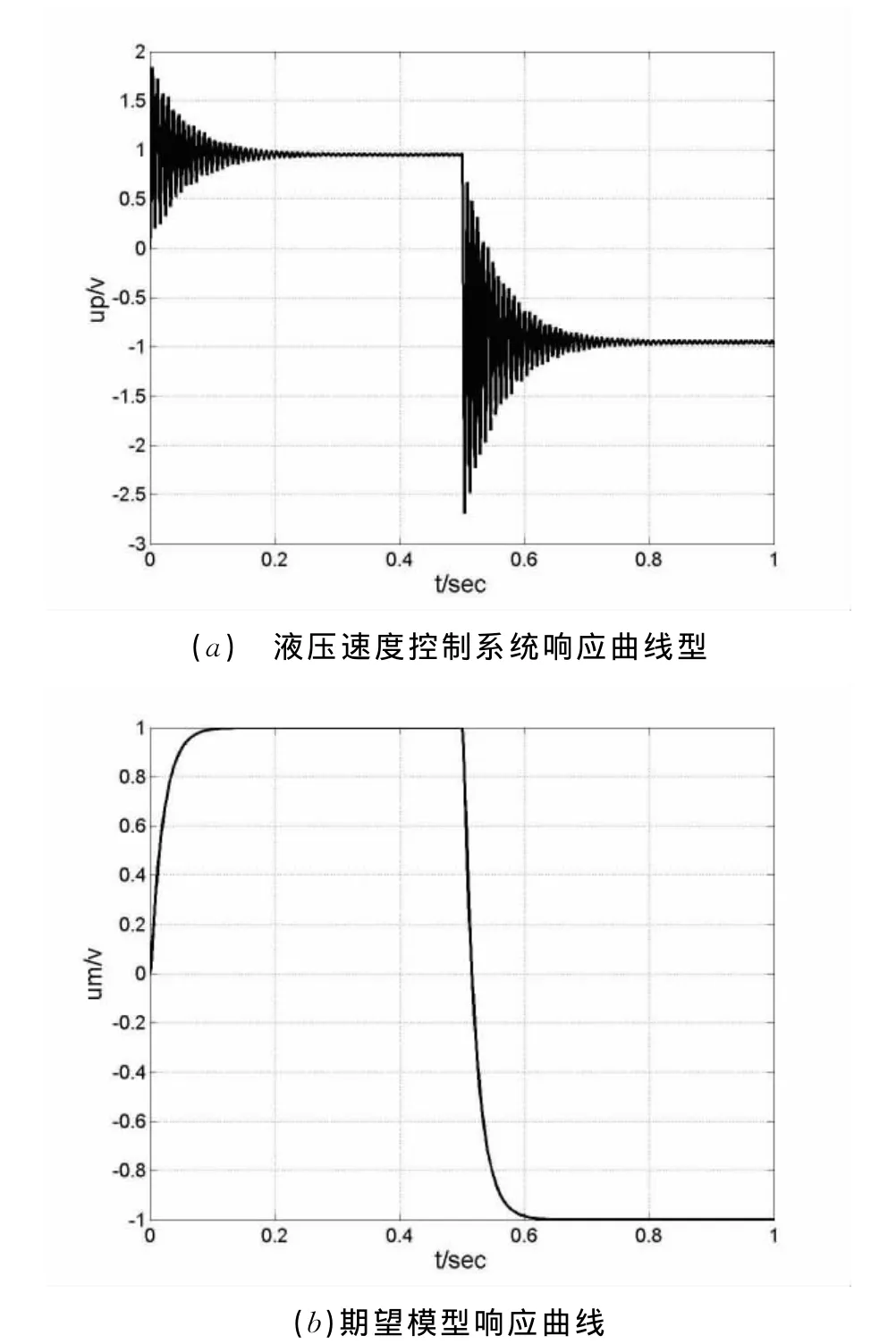
圖3 液壓速度控制系統及期望模型SIMULINK仿真模型
閉環后的電液速度控制系統及希望模型SIMULINK仿真模型如圖2所示。在方波信號作用下,其輸出響應如圖3所示。
由圖3仿真曲線可知,速度控制系統盡管穩定,但其穩定性很差,穩定裕度很小,系統的階躍響應曲線在初階段產生激烈的振蕩,過渡過程時間較長,并且系統存在一定的輸出速度誤差。
2 自適應控制器的設計

取自適應廣義誤差為:

被控系統的控制輸入為:

參數調節規律為:

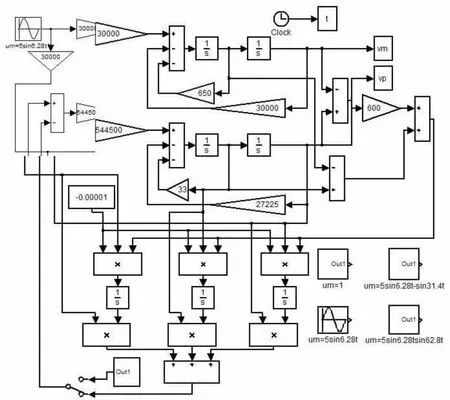
圖4 電液速度自適應控制系統SIMULINK仿真模型
3 電液速度自適應控制系統的仿真試驗研究
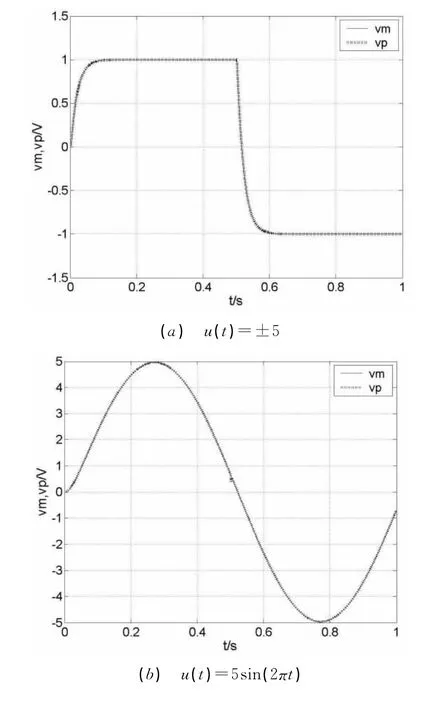
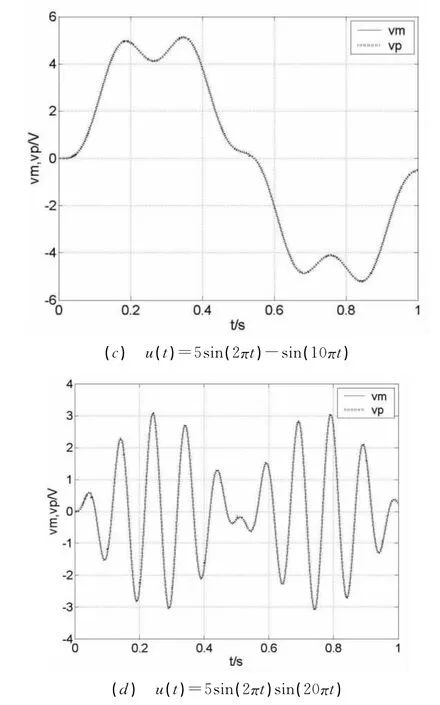
圖5 電液速度自適應控制系統在不同信號作用下的輸出響應曲線
根據上述電液速度自適應控制器的設計,可以作出電液速度自適應控制系統的SIMULINK仿真模型,如圖4所示。該電液速度自適應控制系統在不同輸入信號作用下的輸出響應如圖5所示,系統動態特性得到極大的改善。
4 結論
1)由于電液速度控制系統是零型有差系統,輸出速度偏差隨速度的增大而增大,這說明不能由位置系統簡單地用速度反饋來實現速度控制,這不但存在速度偏差的問題,還可能使系統變為不穩定或穩定裕量較小。
2)本文根據誤差方程多項式代數法設計自適應控制器,構成電液速度自適應控制系統,控制算法簡單,有利于在線控制。
3)通過輸入不同控制信號進行仿真研究,可知該電液速度自適應控制系統控制效果良好,被控系統一致地收斂希望模型的輸出,使之滿足系統要求的動態性能。
[1]Katsuhiko Ogata.現代控制工程[M].3版.盧伯英,于海勛,譯.北京:電子工業出版社,2000.
[2]王積偉,陸一心.現代控制理論與工程[M].北京:高等教育出版社,2003.
[3]吳振順.變結構自適應控制器及其在液壓伺服系統中的應用[J].機械工程學報,2000,36(5):107-110.
[4]熊漢文,付忠輝等.單片機控制的智能PID控制器在液壓系統中的應用[J].機床與液壓,2001,170(2):42-43.
[5]韓俊偉.機電液控制系統仿真與CAD[M].哈爾濱:哈爾濱工業大學出版社,2006.
[6]張鍵成.控制理論基礎與應用[M].哈爾濱:哈爾濱工業大學出版社,2007.
[7]吳振順.液壓控制系統[M].北京:高等教育出版社,2008.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19