基于環形BP神經網絡的指紋匹配算法
2013-10-26 09:05:52車永剛中海油田服務股份有限公司船舶事業部北京101149
長江大學學報(自科版) 2013年1期
車永剛 (中海油田服務股份有限公司船舶事業部,北京 101149)
肖春雨 (龍鳳熱電廠,黑龍江 大慶 163711)
雷 聲 (中國石油天然氣管道局天津設計院,天津 300457)
孫 巍 (哈爾濱工程大學船舶工程學院,黑龍江 哈爾濱 150001)
基于環形BP神經網絡的指紋匹配算法
車永剛 (中海油田服務股份有限公司船舶事業部,北京 101149)
肖春雨 (龍鳳熱電廠,黑龍江 大慶 163711)
雷 聲 (中國石油天然氣管道局天津設計院,天津 300457)
孫 巍 (哈爾濱工程大學船舶工程學院,黑龍江 哈爾濱 150001)
針對傳統BP神經網絡算法收斂慢、抗旋轉畸變效果差的問題,設計了一種多輸入、單輸出的三層前饋神經網絡,該網絡的輸入層呈n層環狀結構,隱層中的第n個神經元接受輸入層第n環所有神經元的數據,對于每個輸入層的神經元,僅采用一個權值連接至對應的隱層神經元;輸出層的唯一一個神經元接受隱層中所有神經元的數據,對于每個隱層神經元,僅采用一個權值連接至輸出層神經元。試驗結果表明,單權值連接方式提高了網絡的收斂速度,環狀結構的設計具有較好的抗旋轉畸變的性能,使得匹配速度和匹配精度均有所提高。
指紋匹配;圖像處理;BP神經網絡
1 BP神經網絡分析
目前的基于神經網絡的指紋匹配算法,主要的思想是在整幅指紋圖像的灰度數據基礎上,以灰度差的絕對平均值(MAD)[1]作為匹配準則。對于2幅指紋圖像來說,設待識指紋圖像A的大小為M×N,那么對于同樣大小的模板指紋圖像B,2幅圖像間的偏移量為:
(1)
式(1)中d的極小值即為匹配成功的特征點。由式(1)可見,如果待識指紋在二維空間內產生了旋轉畸變,則d值會增大。這個特點說明了在指紋識別的應用中,傳統BP神經網絡只具有平移不變性,并不具備旋轉不變性,在處理旋轉畸變較嚴重的圖像時,會出現較大的誤差;另外,傳統BP神經網絡在輸入層中的節點和隱層中的節點通常采用2個以上的權值連接[2],這種結構的神經網絡只有當每個輸入空間都恰好包圍各自的樣本時,輸出層的輸出數據才能接近期望數值,如果樣本中的噪聲影響比較嚴重,容易造成權值的誤差調整值不穩定,使系統不能很快收斂甚至收斂失敗。樣本訓練中由于迭代次數較多,使得收斂速度慢,學習效率低。
2 環形BP神經網絡結構
根據傳統人工神經網絡算法的缺陷,筆者設計了一種多輸入、單輸出的三層前饋神經網絡,該網絡的輸入層呈n層環狀結構,隱層中的第n個神經元接受輸入層第n環所有神經元的數據,對于每個輸入層的神經元,僅采用一個權值連接至對應的隱層神經元;輸出層的唯一一個神經元接受隱層中所有神經元的數據,對于每個隱層神經元,僅采用一個權值連接至輸出層神經元。輸入層的環形結構劃分規則為:根據圖像尺寸選定大小為N×K窗口,以指紋中心點為中心的N×K的矩形區域為第1環,3N×3K大小的矩形區域為第2環,5N×5K大小的矩形區域為第3環,依此類推。圖1給出了在3×3大小的模板下神經網絡的結構圖。
對于一個n環網絡,則需要具有n環的輸入層和n個隱層神經元,其方程可表示為:
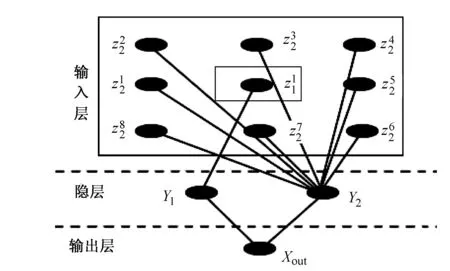
圖1 改進的BP神經網絡示意圖

由于外環比內環的數據量更多,所以噪聲對數據的影響也不同,所以隱層中激勵函數的參數ai可以不同,i值較大的情況下則可以選擇較大的ai值。輸入層到隱層之間,以及隱層到輸出層之間僅采用一個權值連接,權值為1或0,這樣可以減少算法的計算量,使計算速度提高。以指紋的中心點為匹配中心,將待識指紋的分叉點特征模板在數據庫中已有的指紋模板中滑動,滑動路線即為搜索線路,計算每次滑動得到的待識特征點的匹配結果,最優解即為待識圖像的目標點。從而將匹配搜索問題轉化為函數的優化問題。輸入層的數據提取中,以指紋中心點為圓心,將指紋圖像分割為多個環形區域,每個環形區域內的特征點數據采用多對一映射的方式傳遞至隱層進行處理,在每一環的數據進行加權平均后,可以對噪聲影響進行一定程度的平滑處理,由于環形結構的設計,使得算法具有很好的抗旋轉畸變的性能。
3 環形BP神經網絡實現流程
根據指紋圖像的頻率場得出指紋紋線的平均寬度,特征點坐標取為模板圖像的中心點坐標,選取大小為M×L的模板圖像,滑動窗的大小為N×K。滑動窗中參與匹配運算的區域為Ω(n,k),n∈[2,N-1],k∈[2,K-1],由模板大小確定。
將指紋圖像模板在滑動窗中的待匹配區域內的所有分叉點數據看成以該窗中心點為圓心的隱層神經元的輸出數據,并將其輸入到輸入層的神經元中,得到的結果為該滑動窗中心點的匹配值。匹配中心點定為在匹配結果中選取匹配值最大的點。算法流程如下:
步1 將神經網絡的輸入層、隱層、輸出層的節點數輸入;輸入模板圖像的分叉點數據;
步2 計算模板的θ1,θ2,θ3,θ4;
步3 以指紋中心點作為滑動窗的初始目標中心,計算y1,y2,y3,y4,xout;
步4 滑動窗移至下一目標中心,重復步2和步3,直至遍歷所有目標中心;
步5 遍歷結束后,將求得的xout進行加和并設定閾值,大于該閾值則認為匹配成功,小于該閾值則判為匹配失敗。
4 試驗結果及分析
筆者改進的算法實際上是一個3層前饋神經網絡,輸入層分為n環,第n(n=1,2,3,…)環中的所有神經元與隱層中第n個神經元之間采用一個權值連接,權值為0或1;隱層中的所有神經元與輸出層的唯一一個神經元之間采用一個權值連接,權值為0或1,是簡化了的3層前饋神經網絡,可以使收斂速度提高,減少樣本訓練的時間。
為了測試改進的BP神經網絡的收斂速度,筆者使用文獻[3]中所使用的傳統BP神經網絡和筆者的改進BP神經網絡進行了對比測試。網絡訓練中提取了來自國際指紋競賽數據庫(FVC2000)[4]中的100枚指紋對文中所述的改進BP神經網絡進行了訓練,使用的BP網絡輸入層含有25個神經元,隱層含有3個神經元,輸出層含有1個神經元,精度要求為10-6,訓練結果如圖2所示。
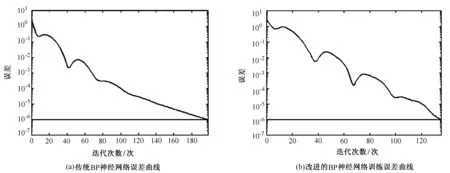
圖2 算法收斂速度比較
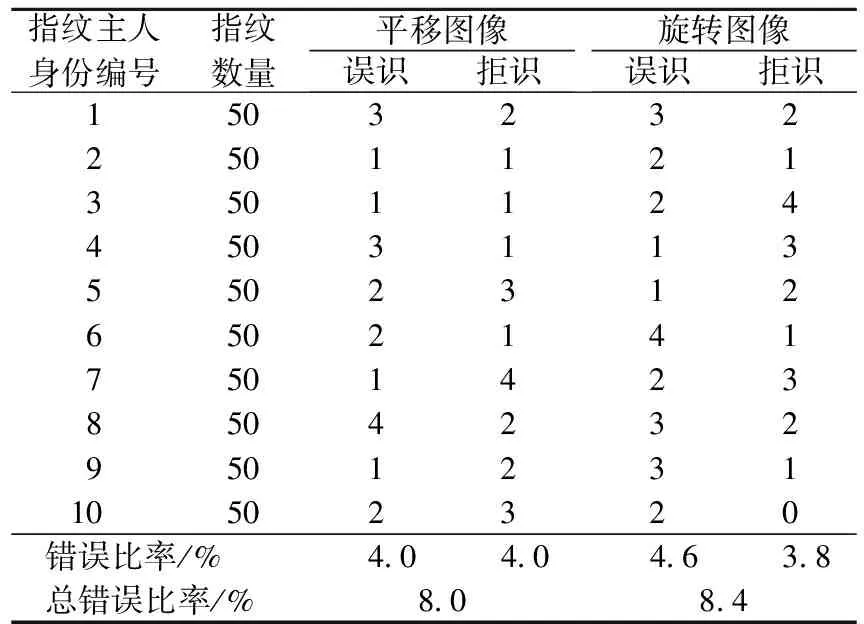
表1 算法提取分叉點的結果
由圖2(a)和圖2(b)的比較可得,傳統的BP神經網絡的訓練次數為198次,改進后的BP神經網絡的訓練次數為135次,在調整權值后,收斂速率得到了較大提升。

5 結 語
針對傳統BP神經網絡匹配算法訓練時間長,抗旋轉畸變效果差的不足,在網絡結構和權值上進行了改進,改進后的BP神經網絡輸入層采用了環狀結構,權值的連接方式也被簡化,這種算法在訓練時收斂速度較快,而且可以極大的降低指紋圖像旋轉造成的影響,能夠進一步有效地降低誤識率。試驗結果驗證了算法的有效性。
[1]毛雁明,楊慧玲.一種新的立體匹配算法[J].計算機技術與發展,2011,21(3):105-108,104.
[2] Lin H,Wang Y,Jain A K. Fingerprint Image Enhancement:Algorithms and Performance Evaluation [J].IEEE Trans Pattern Analysis and Machine Intelligence,1998,20(8):777-789.
[3]尹義龍,寧新寶.改進的指紋細節特征提取算法 [J].中國圖像圖形學報,2002,7(12):1302-1306.
[4]何正友,錢清泉.BP神經網絡結構及其學習算法[J].西南交通大學學報,1999,34(4):436-440.
2012-10-26
車永剛(1963-),男,高級工程師,現主要從事自動控制系統設計及應用方面的研究工作。
TP183
A
1673-1409(2013)01-0022-03
[編輯] 洪云飛