基于模糊神經網絡PID算法的電阻爐溫控系統
2013-10-20 08:36:20董愛華李夢瑤
微型電腦應用 2013年12期
關鍵詞:系統
董愛華,李夢瑤
0 引言
電阻爐不僅在工業生產中非常廣泛的應用于冶金、機械、建材等行業[1][2],而且在科研、教學中也有應用,它的溫度控制的優劣直接影響產品的品質[3]。
現階段,對電阻爐采用的主要控制方法是PID控制[4],還有一些采用模糊控制和神經網絡控制。PID控制的控制參數一旦確定,便無法改變,對電阻爐這種時變的控制對象控制效果不是很好。當采用模糊算法時,模糊系統學習能力較差,模糊規則的建立和隸屬度函數的生成和調整較困難,模糊控制消除靜態誤差的能力較差,難以達到較高的控制精度[5]。當采用神經網絡控制時,不能利用現有的知識,無法引入人工經驗,不能依據已有的控制經驗來解決控制問題。
本文把三個控制算法融合起來,形成模糊神經網絡PID算法,兼有三種控制算法的優點,經仿真表明,該算法對電阻爐溫度的控制動靜態性能較好。
1 電阻爐模型
電阻爐溫控系統的簡圖如圖1所示:
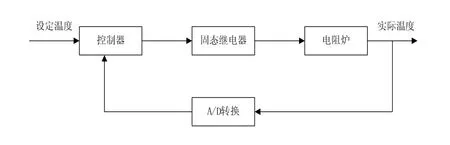
圖1 電阻爐溫控系統簡圖
通過改變一個周期內晶閘管的通斷時間,改變電阻爐的電壓,從而改變電阻爐的功率,使實際溫度跟隨設定溫度的變化而改變。
2 電阻爐模型
理論分析和實驗結果證明,電阻爐在階躍輸入影響下,具有非振蕩特性和自平衡能力,可用比例環節、一階慣性環節和一個延遲壞節來近似。其傳遞函數可以近似地表示成:

其中K—靜態增益,τ—純滯后時間,T—慣性時間常數。
3 模糊神經網絡PID控制器的設計
當|e(k)|> ε,(ε的大小決定著控制精度,ε越小,控制精度越高,程序越復雜;反之,ε越大,控制精度越低,程序越簡單)說明誤差較大,控制器按最大或最小輸出,具體到電阻爐溫度控制,即溫度誤差較大, 控制器以最大或最小輸出,電阻爐全功率或功率為零,也就是控制電阻爐電壓為最大或零。當|e(k)|<ε,系統采用模糊神經網絡PID控制。在實際應用中,根據不同控制精度的要求,多次調試,選擇合適的ε。
本文提出的模糊神經網絡PID控制器的結構,如圖2所示:
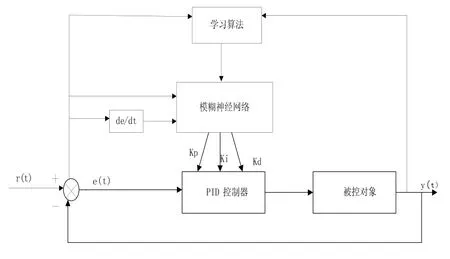
圖2 模糊神經網絡PID控制器的結構圖
模糊神經網絡PID主要有兩個部分組成(1)傳統的PID控制器。這是控制器的核心,PID控制器對被控對象直接進行閉環控制,模糊神經網絡主要作用是實時調節PID控制器的參數,從而達到最好的控制效果。它的最大特點是控制參數Kp、Ki、Kd是實時改變的。(2)模糊神經網絡FNN,根據系統的實時運行狀態,即根據誤差和誤差變化率來調節PID控制器的參數,使控制指標達到最優[6]。
本文中的PID控制并不是簡單的比例、微分和積分的“線性組合”關系[7],若想取得較好的控制效果,必須使比例、積分和微分3種控制作用達到最佳的組合。模糊神經網絡的主要任務就是利用模糊神經網絡理論建立誤差e(k)、誤差變化率ec(k)和PID控制器的3個參數Kp、Ki、Kd的關系。
如公式(2)

e(t)—t時刻的采樣誤差;y(t)—被控對象t時刻的實際輸出:r(t)—t時刻的設定輸出:t—采樣時間。
3.1 PID控制原理
控制器采用的最多的是PID控制,PID控制是一種線性控制方法,原理框圖如圖3所示。其位置式控制規律,如圖3所示:
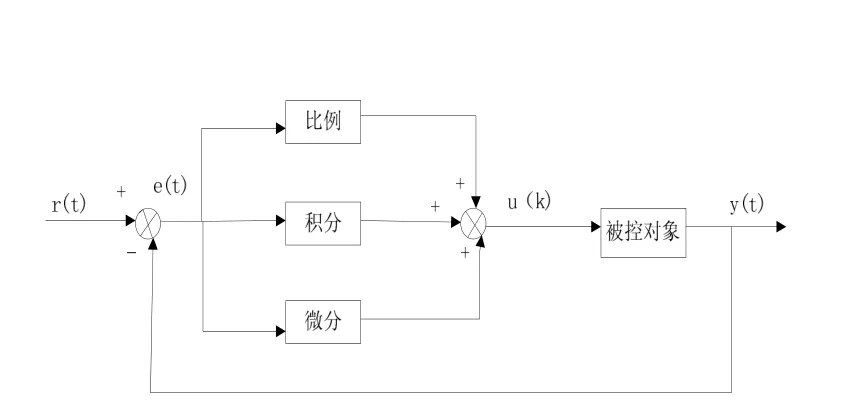
圖3 PID控制系統原理框圖
如公式(3)

其中u(k)—第k次采樣時刻控制器輸出的控制量;Kp—比例系數;Ti—積分時間常數;Td—微分時間常數;T采樣周期;Ki=Kp/Ti為積分系數,Kd=KpTd為微分系數,e(k)和e(k-1)分別是第k和k-1次采樣時刻輸入誤差值。
3.2 模糊神經網絡的結構和設計
模糊神經網絡(FNN)將神經網絡的學習能力引入到模糊系統中,將模糊系統的模糊化處理、模糊推理通過神經網絡來表示[8],一般分為四層:1 輸入層;2 模糊化層;3 模糊推理層;4 輸出層。它的結構圖,如圖4所示:
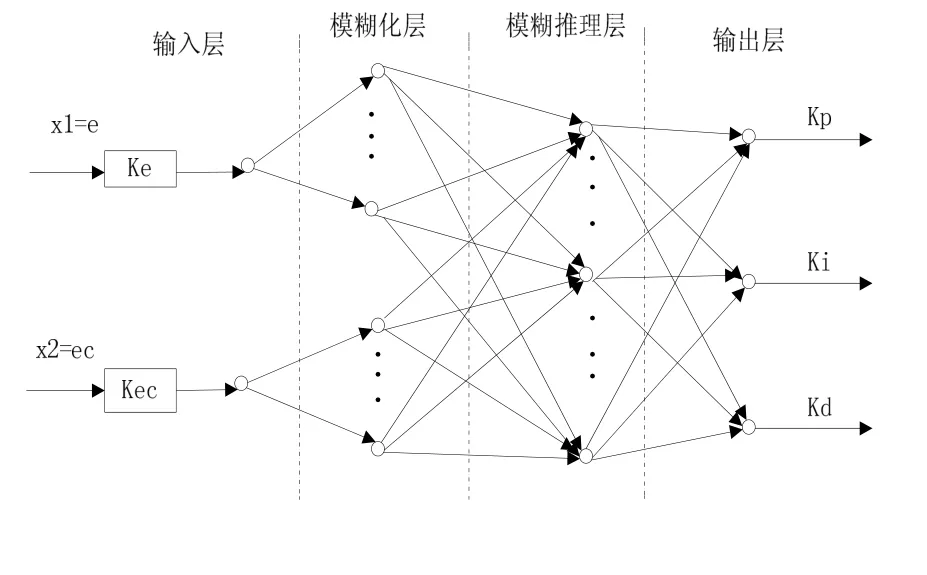
圖4 模糊神經網絡結構圖
輸入層與模糊化層、模糊化層與模糊推理層之間的連接權值均為l,只有模糊推理層與輸出層之間的權值需要調整。
本文中的模糊神經網絡是2-6-9-3結構,兩個輸入神經元,3個輸出神經元分別對應PID控制器的3個參數Kp、Ki、Kd。
模糊神經網絡各層的輸入輸出關系如下:
第1層(輸入層):作用將輸入量導入網絡,如公式(4)
第2層(模糊化層):將輸入變量模糊化,計算輸出各輸入變量屬于各語言變量的隸屬度函數。本層有6個節點,分別對應誤差和誤差變化率的語言變量:B(大),M(中),S(小)。語言變量的個數的選擇和系統的復雜程度和控制精度的要求有關。控制精度要求高,系統復雜,選擇的語言變量個數就要多,如公式(5)

模糊化層采用高斯型函數作為隸屬函數,cij和bij分別是隸屬函數的中心值和寬度。
第3層(模糊推理層):
由輸入變量個數N=2,每個變量的模糊子集數為M=7,根據y=MN,可得此層的節點數m=9[9]。

第4層(輸出層):

ωij是模糊推理層與輸出層之間的權值。三個輸出神經元的輸出為PID控制器的三個參數Kp、Ki、Kd。

3.3 模糊神經網絡的學習算法
系統的目標函數:
tk第k個神經元的期望輸出, pk第k個神經元的實際輸出。
模糊神經網絡的高斯函數的中心cij和寬度cij,及模糊推理層與輸出層之間的權值ωij采用BP的梯度下降法。
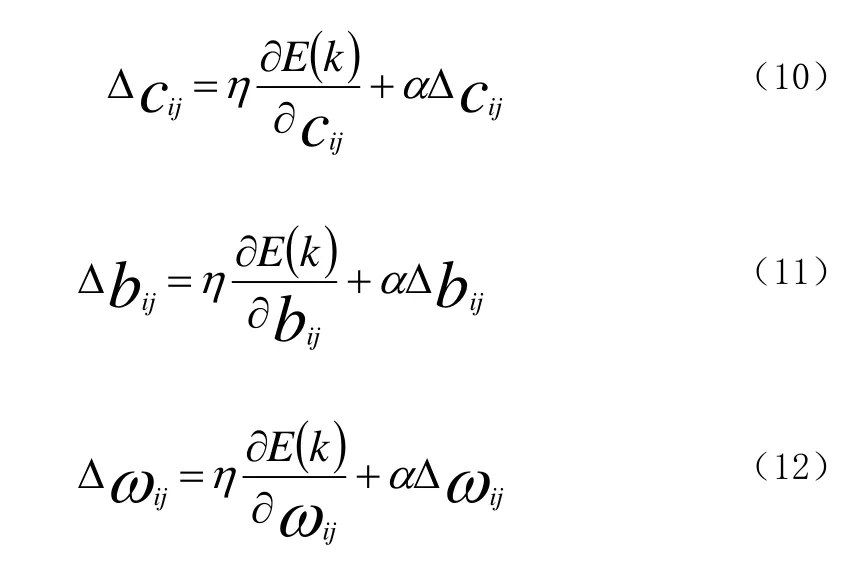
η為學習速率,α為慣性系數。
4 仿真結果與分析
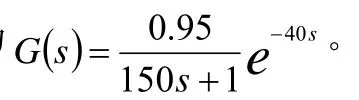
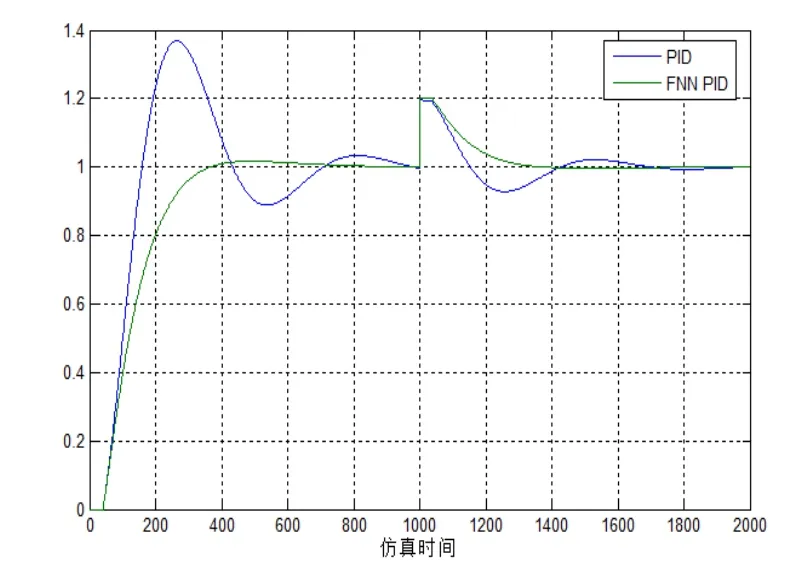
圖5 仿真曲線圖
從仿真曲線可知,模糊神經網絡PID(FNN PID)和PID比較:模糊神經網絡PID上升速度快,超調量基本為零,在加入外部擾動時,能快速的調節到穩定。
[1]邢偉.電阻爐智能模糊控制系統的研制[D].杭州: 浙江理工大學,2008.
[2]謝錚輝,馬有良,鄧琥等.基于PID的電阻爐爐溫控制系統[J].化工自動化及儀表,2011,38(8):931-933
[3]孫凱,李元科.電阻爐溫度控制系統[J].傳感器技術,2003,22(2):50-52.
[4]馬雪峰,田躍輝,李玲莉.一種改進PID控制算法在電阻爐溫度控制系統中的應用[J].船海工程,2009,38(2):68-70.
[5]李英順 ,倫淑嫻.模糊PID溫度測控儀[J].儀表技術與傳感器,2003,(1):20-22
[6]張妤.基于知識的模糊神經網絡PID控制器的研究[D].哈爾濱:哈爾濱理工大學,2006.
[7]王彥,鄧勇,王超.基于改進粒子群算法的模糊神經網絡PID控制器設計[J].控制工程,2012,19(5):761-764.
[8]劉敏,馬軍爽.模糊RBF 神經網絡在鍋爐水位控制中的應用[J].微計算機信息, 2006 ,22 ,(9-1 ):56-58.
[9]劉莉,張彥敏.基于改進遺傳算法的FNN PID控制器在溫度控制系統中的應用[J].工業控制計算機,2009,22(3):63-65.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
