無(wú)人機(jī)的魯棒控制方法研究
2013-10-19 10:14:36杜燕軍
河南科技 2013年11期
關(guān)鍵詞:功能
杜燕軍
(中國(guó)人民解放軍96626部隊(duì),北京 10010)
從應(yīng)用科技角度分析,無(wú)人機(jī)是多種高科技理論應(yīng)用的集成體,采用了無(wú)線電遙控設(shè)備和自動(dòng)程序控制裝置,在無(wú)人操控條件下自動(dòng)完成指令任務(wù)。魯棒控制法是無(wú)人機(jī)研制的新型科技,其結(jié)合魯棒控制理論對(duì)無(wú)人機(jī)實(shí)施自主調(diào)控,保證了無(wú)人駕駛飛機(jī)的穩(wěn)定運(yùn)行。本次分析了無(wú)人機(jī)的魯棒控制方法,對(duì)實(shí)際控制操作提出了相關(guān)建議。
一 魯棒控制的概述
1.魯棒性
工業(yè)科技發(fā)展使得人們更加依賴(lài)于自動(dòng)控制技術(shù)的應(yīng)用,實(shí)際作業(yè)條件下也出現(xiàn)了不同的異常狀態(tài),進(jìn)而影響到了自動(dòng)控制性能的發(fā)揮。“魯棒性”是在異常狀況下提出的控制概念,主要是指某一設(shè)備能否在故障狀態(tài)下維持正常的運(yùn)作功能,這便是控制系統(tǒng)的魯棒性,如圖1。舉一實(shí)例,計(jì)算機(jī)控制系統(tǒng)是自動(dòng)控制技術(shù)應(yīng)用的典范,軟硬件設(shè)施受到外界環(huán)境干擾時(shí)易發(fā)生程序錯(cuò)誤、指令失控、裝置過(guò)載等問(wèn)題。若此時(shí)軟硬件系統(tǒng)執(zhí)行自動(dòng)化處理模塊,維持了計(jì)算機(jī)設(shè)備的正常運(yùn)轉(zhuǎn),實(shí)際操作功能未受到任何影響,這便是計(jì)算機(jī)魯棒性的表現(xiàn)。
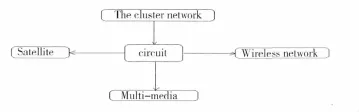
圖1 魯棒性
2.魯棒控制
自動(dòng)控制技術(shù)是現(xiàn)代科技創(chuàng)新的先進(jìn)成果,自動(dòng)控制系統(tǒng)借助各種功能性裝置而實(shí)現(xiàn)了多元化控制模式,用自動(dòng)控制器取代了人工操作模式,顯著提升了機(jī)械、電氣等設(shè)備的可調(diào)度性。基于魯棒性特點(diǎn)下,科技研究領(lǐng)域提出了魯棒控制方法,這種系統(tǒng)是對(duì)原始自動(dòng)控制模式的優(yōu)化改進(jìn)。魯棒控制是指針對(duì)工業(yè)自動(dòng)化控制實(shí)施的改造方案,采用了數(shù)字化運(yùn)算模型為支撐平臺(tái),對(duì)控制模型的不確定性給予調(diào)控,從而實(shí)現(xiàn)了自動(dòng)控制功能的升級(jí)。魯棒控制是基于魯棒性理論的一種新方法,通過(guò)設(shè)置高性能的控制器為輔助,按照被控制對(duì)象的操作要求調(diào)控。并且當(dāng)控制系統(tǒng)的功能、結(jié)構(gòu)、外形等參數(shù)發(fā)生異常變化時(shí),依舊能維持設(shè)備或元件應(yīng)有的功能狀態(tài),此種方法則是“魯棒控制”。
二 無(wú)人機(jī)魯棒控制的特點(diǎn)
隨著科學(xué)技術(shù)的快速發(fā)展,我國(guó)對(duì)于無(wú)人機(jī)研究的進(jìn)程不斷加快,并且在現(xiàn)有技術(shù)條件下研發(fā)了更多的配套設(shè)施,保障了無(wú)人機(jī)裝置功能的有效的發(fā)揮。相比于傳統(tǒng)飛機(jī)駕駛模式,采用魯棒控制方法之后,無(wú)人機(jī)的應(yīng)用功能進(jìn)一步提升。
1.自動(dòng)性。自動(dòng)控制系統(tǒng)是無(wú)人機(jī)最基本的應(yīng)用特點(diǎn),配備了無(wú)線電遙控裝置、自動(dòng)控制程序等核心結(jié)構(gòu),對(duì)飛機(jī)駕駛操作實(shí)施自動(dòng)化調(diào)度。魯棒控制理論指導(dǎo)下,無(wú)人機(jī)研制的控制系統(tǒng)更加先進(jìn),不僅滿(mǎn)足了自動(dòng)控制操作的要求,也能對(duì)遙控器進(jìn)行更全面的改造。
2.安全性。從實(shí)際應(yīng)用情況看,無(wú)人機(jī)常用于執(zhí)行危險(xiǎn)性的任務(wù),特別是在軍事偵察、勘測(cè)等方面的應(yīng)用更多。相比于載人飛機(jī),無(wú)人機(jī)的安全系數(shù)更高,執(zhí)行任務(wù)時(shí)不會(huì)造成人員方面的傷亡。無(wú)線通信是無(wú)人機(jī)的主要技術(shù)合成,GPS技術(shù)融入新型無(wú)人機(jī)研制方案中,擴(kuò)大了飛機(jī)的通信傳輸面域,方便了遙控信號(hào)的定位傳輸。
3.高效性。近年來(lái),無(wú)人機(jī)的魯棒控制技術(shù)日趨成熟,顯著降低了無(wú)人機(jī)的故障率,維護(hù)了飛機(jī)內(nèi)外部裝置的持久應(yīng)用,這些都為無(wú)人機(jī)循環(huán)利用提供了有利的條件,提升了資源的實(shí)用性。例如,魯棒控制方法應(yīng)用無(wú)線電遙控,可對(duì)無(wú)人機(jī)實(shí)施跟蹤、定位、遙控、監(jiān)測(cè)等多方面的安全控制。
三 Matlab下無(wú)人機(jī)的建模與仿真
對(duì)無(wú)人機(jī)的魯棒性進(jìn)行模擬仿真,需要借助先進(jìn)的模擬軟件才能實(shí)現(xiàn),這是保證模擬結(jié)果準(zhǔn)確性的前提。Matlab是一款比較實(shí)用的商業(yè)數(shù)學(xué)軟件,用其作為無(wú)人機(jī)模擬控制器,可以加快對(duì)無(wú)人機(jī)性能的綜合調(diào)度,客觀地反映出無(wú)人機(jī)工作狀態(tài)。此數(shù)學(xué)軟件能夠?qū)o(wú)人機(jī)魯棒性實(shí)施自動(dòng)化運(yùn)算,結(jié)合所得數(shù)據(jù)判斷出無(wú)人機(jī)所處的功能狀況,這涉及到了算法優(yōu)化、數(shù)據(jù)分析、語(yǔ)言交換等應(yīng)用。本次Matlab下無(wú)人機(jī)仿真建模的技術(shù)應(yīng)用。
1.C MEX S-Function下的模擬
C MEX S-Function是計(jì)算機(jī)C語(yǔ)言下編制成的S函數(shù),每一種函數(shù)都有不同的使用功能。從功能角度劃分,主要涉及到七大結(jié)構(gòu),第一部分是宏觀定義區(qū),Matlab模擬仿真中涉及到的頭文件、源文件等,都是此技術(shù)定義的范圍。其余6個(gè)結(jié)構(gòu),則交由S-Function函數(shù)執(zhí)行,模擬流程如圖2。
2.Simulink下的模擬
結(jié)合無(wú)人機(jī)控制模擬,其主要包括氣動(dòng)數(shù)據(jù)解算、狀態(tài)/運(yùn)動(dòng)方程解算等。前者有發(fā)動(dòng)機(jī)推力、阻力系數(shù)、側(cè)力系數(shù)、升力系數(shù)等,后者主要分為計(jì)算無(wú)人機(jī)狀態(tài)、計(jì)算無(wú)人機(jī)運(yùn)動(dòng)方程等模塊。設(shè)定Simulink模型庫(kù),能夠掌握各個(gè)模塊的使用功能,并且結(jié)合Matlab軟件加快數(shù)據(jù)的自動(dòng)化處理。操作使用中可按照建模情況,對(duì)系統(tǒng)擴(kuò)展能力及時(shí)地調(diào)整,確保無(wú)人機(jī)在相對(duì)穩(wěn)定的狀態(tài)下運(yùn)行。
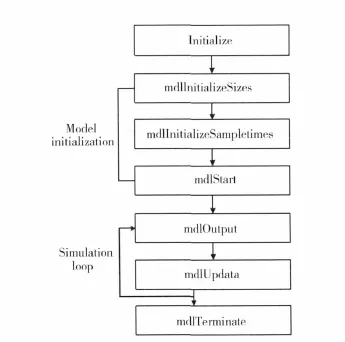
圖2 C語(yǔ)言編程下的S函數(shù)
3.基于Matlab的模擬
參照12維的狀態(tài)及運(yùn)動(dòng)方程,結(jié)合無(wú)人機(jī)模型的結(jié)算流程,便可以正式執(zhí)行無(wú)人機(jī)模擬動(dòng)態(tài)。本次基于Matlab的Simulink模擬中,實(shí)現(xiàn)過(guò)程與解算流程:氣動(dòng)數(shù)據(jù)解算模塊按照飛控部分輸出的舵機(jī)狀態(tài),對(duì)參數(shù)與信息流程實(shí)施控制,借助氣動(dòng)數(shù)據(jù)的差值算法對(duì)力矩系數(shù)進(jìn)行計(jì)算。對(duì)于模擬計(jì)算所得的結(jié)果,交由無(wú)線網(wǎng)絡(luò)傳輸機(jī)傳感器實(shí)施對(duì)點(diǎn)傳遞,為無(wú)人機(jī)控制提供了指導(dǎo)。
四 基于Matlab仿真的魯棒控制
自動(dòng)控制是無(wú)人機(jī)研制的主要科技之一,控制系統(tǒng)按照無(wú)人機(jī)內(nèi)裝置結(jié)構(gòu)及控制單元進(jìn)行編排,擬定了與無(wú)人機(jī)相配套的自動(dòng)化控制平臺(tái),維持了飛機(jī)原有的功能特性。魯棒控制理論應(yīng)用于無(wú)人機(jī)操控指導(dǎo),顯著提升了機(jī)載裝置控制的效率,加快了新型戰(zhàn)機(jī)應(yīng)用模式的改革速度。本次結(jié)合無(wú)人機(jī)作業(yè)的具體情況,對(duì)魯棒控制方法的應(yīng)用進(jìn)行闡述,具體如下:
1.無(wú)線傳輸。無(wú)線圖像傳輸作為一個(gè)特殊使用方式也逐漸應(yīng)用于無(wú)人機(jī)控制,這是魯棒控制方法的常見(jiàn)形式。無(wú)人機(jī)本質(zhì)上是一種遠(yuǎn)程遙控式的不載人飛機(jī),通過(guò)無(wú)線網(wǎng)絡(luò)傳輸以執(zhí)行控制指令。無(wú)線傳輸網(wǎng)的魯棒性相對(duì)穩(wěn)定,不會(huì)因?yàn)闊o(wú)線網(wǎng)絡(luò)變動(dòng)而失去了原有的控制性能。無(wú)線傳輸網(wǎng)具有安裝方便、靈活性強(qiáng)、性?xún)r(jià)比高等特性,使得更多行業(yè)的監(jiān)控系統(tǒng)采用無(wú)線傳輸方式,建立被監(jiān)控點(diǎn)和監(jiān)控中心之間的連接。
2.遠(yuǎn)程協(xié)助。遙控人員在異地通過(guò)計(jì)算機(jī)網(wǎng)絡(luò)異地?fù)芴?hào)或雙方都接入Internet等手段,聯(lián)通需被控制的計(jì)算機(jī)對(duì)無(wú)人機(jī)性能進(jìn)行維護(hù),遇到突發(fā)情況可以保證飛機(jī)及其裝置的穩(wěn)定性。魯棒控制法中將被控?zé)o人機(jī)的工作狀態(tài)顯示到主控計(jì)算機(jī)之上,通過(guò)本地計(jì)算機(jī)對(duì)遠(yuǎn)方計(jì)算機(jī)進(jìn)行配置、軟件安裝程序、修改等工作。遠(yuǎn)程協(xié)助控制時(shí)通過(guò)局域網(wǎng)絡(luò)實(shí)現(xiàn)遠(yuǎn)程開(kāi)機(jī),加快了無(wú)人機(jī)在故障狀態(tài)下的恢復(fù)進(jìn)程。

圖3 遠(yuǎn)程控制
3.故障診斷。應(yīng)用魯棒控制方法對(duì)無(wú)人機(jī)進(jìn)行檢測(cè),不僅提高了地面對(duì)空中飛行軌跡的控制引導(dǎo),也實(shí)現(xiàn)了無(wú)人機(jī)監(jiān)控操作的高效性。以飛行速度監(jiān)控為例,系統(tǒng)故障診斷是對(duì)系統(tǒng)運(yùn)行狀態(tài)和異常情況作出判斷,并根據(jù)診斷作出判斷為系統(tǒng)故障恢復(fù)提供依據(jù)。要對(duì)魯棒控制系統(tǒng)進(jìn)行故障診斷,首先必須對(duì)其進(jìn)行檢測(cè),在發(fā)生系統(tǒng)故障時(shí),對(duì)故障類(lèi)型、故障部位及原因進(jìn)行診斷,最終給出解決方案,實(shí)現(xiàn)故障恢復(fù)。
4.智能控制。隨著無(wú)人機(jī)使用范圍的擴(kuò)大化,對(duì)魯棒控制系統(tǒng)研究的層次更加深入。軍事工程不僅要靈活地應(yīng)用魯棒控制方法,還要對(duì)其中存在的控制問(wèn)題及時(shí)防范,提高無(wú)人機(jī)裝置的可調(diào)度性能。自動(dòng)控制器是借助魯棒控制理論研制而成的,智能操作是一類(lèi)無(wú)需人的干預(yù)就能夠自主地驅(qū)動(dòng)機(jī)器實(shí)現(xiàn)其目標(biāo)的自動(dòng)控制,也是用計(jì)算機(jī)模擬人類(lèi)智能的一個(gè)重要領(lǐng)域。
五 結(jié)論
無(wú)人機(jī)在我國(guó)軍事工程中得到了普及應(yīng)用,其能夠按照人工操作要求執(zhí)行各種危險(xiǎn)性的任務(wù),并且完全受控于地面指揮中心。無(wú)人機(jī)采用了無(wú)線電遙控設(shè)備和自動(dòng)控制程序,實(shí)現(xiàn)了超遠(yuǎn)程的人機(jī)控制一體化。魯棒控制是無(wú)人機(jī)自動(dòng)控制技術(shù)的必備形式,其能夠在自動(dòng)控制故障狀態(tài)下,使機(jī)載裝置維持原有的功能,降低了無(wú)人機(jī)事故的發(fā)生率,是現(xiàn)代無(wú)人機(jī)研制的重要控制技術(shù)。
[1]黃賦光,謝運(yùn)祥,楊蘋(píng);新型Boost逆變器的積分滑模控制[J];電力電子技術(shù);2004年01期;
[2]朱榮剛,姜長(zhǎng)生,鄒慶元,蔡世龍;新一代殲擊機(jī)超機(jī)動(dòng)飛行的動(dòng)態(tài)逆控制[J];航空學(xué)報(bào);2003年03期;
[3]陳謀;姜長(zhǎng)生;吳慶憲;;基于多模型方法的全包絡(luò)魯棒飛行控制器設(shè)計(jì)[J];航空學(xué)報(bào);2006年03期;
[4]吳德偉,高曉光,陳軍;戰(zhàn)術(shù)數(shù)據(jù)鏈的建設(shè)與發(fā)展[J];火力與指揮控制;2004年01期;
[5]陳謀,姜長(zhǎng)生,吳慶憲,曹邦武;基于RBF神經(jīng)網(wǎng)絡(luò)的一類(lèi)不確定非線性系統(tǒng)自適應(yīng)H_∞控制[J];控制理論與應(yīng)用;2003年01期;
[6]唐功友;呂杉杉;董瑞;;具有控制時(shí)滯的離散系統(tǒng)的無(wú)抖振滑模控制[J];控制理論與應(yīng)用;2008年06期;
[7]施陽(yáng),慕春棣;基于線性參數(shù)神經(jīng)網(wǎng)絡(luò)的非線性系統(tǒng)穩(wěn)定自適應(yīng)控制[J];控制與決策;2000年04期。
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩(shī)詞(2022年6期)2022-12-31 06:41:24
當(dāng)代陜西(2021年21期)2022-01-19 02:00:26
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2020年1期)2020-02-20 13:23:44
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年11期)2019-01-14 03:07:20
中國(guó)科技論壇(2017年7期)2017-07-25 08:49:53
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國(guó)際漢語(yǔ)學(xué)報(bào)(2016年1期)2017-01-20 08:21:20
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55