基于CC-Link總線的懸臂式堆取料機控制系統設計
2013-10-17 13:28:42石亞茹孫英培李永聰關玉明
制造業自動化 2013年15期
石亞茹,孫英培,李永聰,關玉明
SHI Ya-ru,SUN Ying-pei,LI Yong-cong,GUAN Yu-ming
(河北工業大學 機械工程學院,天津 300130)
0 引言
1 懸臂式斗輪堆取料機電氣控制技術總體方案
1.1 懸臂式斗輪堆取料機的基本結構
懸臂式斗輪堆取料機整體基本機構如圖1所示。
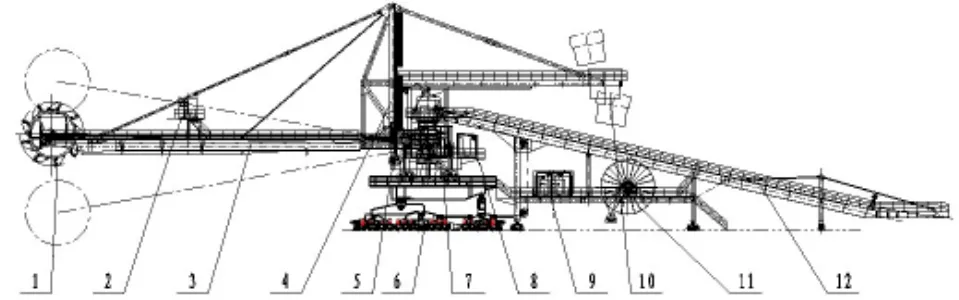
圖1 懸臂式斗輪堆取料機基本結構
1.2 懸臂式斗輪堆取料機電氣控制技術方案
堆取料機控制系統中的控制對象有:回轉機構、俯仰機構、斗輪機構、行走機構和尾車等部分,另外還要與其它物料裝卸設備(例如排土機、地面皮帶輸送機)建立通信。從控制系統組成的角度出發,分為控制核心、PLC、現場總線、人機界面、遠程控制等幾個方面。
1.2.1 各控制部分的選擇方案
1)控制核心的選擇:堆取料機復雜的工作流程、嘈雜的工作環境、強烈的電磁干擾都使低價的單片機控制系統愛莫能助,從而考慮選擇適于工控現場的PLC作為堆取料機的控制核心。
2)PLC的選擇:采用模塊化控制的思想,從物料裝卸裝備系統角度把控制系統分為堆取料機、排土機、地面皮帶輸送機三個部分,從堆取料機機構上分為斗輪、俯仰、回轉、行走、尾車等幾個相對較小的控制系統,一個或幾個模塊從距離、工藝復雜程度和走線等方面配備一個PLC,從而實現單獨控制。斗輪堆取料裝備控制點數多,程序復雜,采用多個中小型PLC聯合控制;排土裝備和皮帶輸送裝備控制點數相對較少,采用中小型PLC;各個裝備之間的通訊用PLC通訊模塊來完成。
3)現場總線的選擇:CC-Link總線采用主從站結構,主站指控制數據鏈接系統的站(QJ61BT11N),從站指遠程I/O模塊和遠程設備模塊(即PLC模塊),多個PLC之間可以通過主從站結構進行通信。大型物料裝卸設備系統的工作性質決定多個模塊之間必須協同合作,鑒于此考慮采用總線方式來連接多個PLC,加上多模塊主從站思想,從而實現多模塊之間的通信。在整個物料裝備控制系統應用中,多個PLC不僅能夠單獨完成一部分任務,多個PLC之間必須還能夠互通有無,因此采用CC-Link作為堆取料機的總線傳輸方式。堆取料裝備控制系統復雜,作為CC-Link主站設計,排土裝備和皮帶輸送裝備作為從站設計,從而實現整個物料系統之間的通訊。主站與從站中PLC與現場設備之間用RS-485進行通信。
4)人機界面的選擇:司機室內空間狹小,采用大屏幕觸摸屏完全合理;地面遠程控制室,沒有空間限制,且需要人機界面功能強大,我們采用工控機來實現。
5)遠程控制信息載體的選擇:遠程通信用來遠程檢測和控制物料裝卸設備的運行。目前遠程通信的方式有:線路交換和分組交換,線路交換用公用電話網建立連接,分組交換常用因特網。電話網和因特網的切換主要由因特網數據的實時傳輸速率來決定,當因特網傳輸速率快時,就采用因特網,當因特網傳輸速率慢時,就切換成電話網。圖2是采用的兩種通信方式的遠程通信系統示意圖。

圖2 堆取料機遠程通信系統示意圖
1.2.2 斗輪堆取料機高壓電源電氣控制技術方案
變壓器繞組徑向變形主要影響的是集總參數模型中的高低壓繞組之間的電容。根據實際情況的調查以及對繞組電動力的研究發現,這類故障主要發生在高壓繞組的外側。隨著故障程度的增加,高壓繞組與油箱之間的電容會減小。根據文獻[8]的分析可知,徑向變形繞組模型為
斗輪堆取料機上機電源采用6kV三相交流電(3PH+PE,50Hz)。6kV電源由變配電所6kV開關柜提供,通過高壓電纜引至斗輪堆取料機軌道中點處的動力電纜接線箱,再通過橡膠軟電纜、電纜卷筒和集電環引至斗輪堆取料機上配電室內高壓控制柜,高壓控制柜中高壓電源直接供給高壓電機工作。高壓控制柜通過高壓變壓器變壓,輸出380V作為動力電源,供給各機構的驅動電動機(如圖3所示)。
高壓回路中采用的保護元件有高壓熔斷器、高壓真空斷路器、防雷型壓敏電阻器和高壓變壓器的溫度控制器等。
1.2.3 控制電纜卷筒電氣控制技術方案
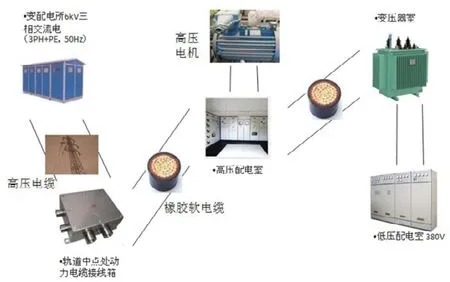
圖3 堆取料機高壓電源引入方案
斗輪堆取料機根據工作需要,要在固定的導軌上移動,這時動力電纜、控制電纜都要跟著移動,需要做到電纜的收放自如。本設計由電機、行星齒輪箱、圓錐減速箱、磁制聯軸器和電纜卷盤等組成磁制式電纜卷筒裝置。這個設計的核心部件是磁制聯軸器,它具有特殊力矩偶合功能。工作時電機產生的旋轉動力先傳至磁制聯軸器,再通過行星齒輪箱和圓錐減速箱將旋轉力矩放大后傳至電纜卷盤。電機始終向收卷方向旋轉。需要放卷時電纜拖拽力克服磁制聯軸器的磁場力矩,使磁制聯軸器兩盤之間產生滑差,把卷盤上的電纜放開。需要收卷時,電纜的拖拽力消除,電纜卷筒朝收卷方向卷取電纜。為避免電纜卷曲產生的扭轉應力過大造成電纜扭損甚至斷裂等重大事故,從大車行走軌道中點處動力電纜接線箱中引出的高壓電源電纜先引至高壓滑環箱中的定子,再從高壓滑環箱中轉子引出高壓電纜卷曲在電纜卷盤上。
1.2.4 懸臂式斗輪堆取料機整體電氣控制方案

圖4 堆取料機整體電氣控制方案示意圖
堆取料機整體電氣控制方案框圖如圖5所示。
2 懸臂式斗輪堆取料機控制技術硬件設計
2.1 CC-Link現場總線在懸臂式斗輪堆取料機上的硬件配置

圖5 堆取料機整體電氣控制方案框圖
CC-Link通訊系統通過專用電纜將分散的特殊功能模塊、I/O模塊等連接起來,并通過PLC的CPU來控制這些相應模塊。CC-Link特殊接口模塊FX2N-32CCL的作用是將PLC作為遠程設備站掛接到CC-Link中形成一個簡單的分散控制系統。根據懸臂式斗輪堆取料機的基本機構和生產功能以及考慮到之后與其它堆取料設備的通信,我們把斗輪堆取料機CC-Link系統分為一個主站,4個掛接從站和1個預備從站,其中主站放在電氣室,它的功能是統籌控制整個物料堆取系統還包括斗輪的旋轉控制和液壓缸的俯仰控制。第一個從站放在司機室,它的的功能是連接觸摸式人機界面和各種操作按鈕、手柄以及聲光報警系統。第二個從站放在電氣室,它的功能是控制大車行走和變頻電機的回轉控制。第三個從站放在電氣室,它的功能是控制懸臂式皮帶輸送機和尾車皮帶輸送機。第四個從站放在電氣室,它的功能是控制動力和控制電纜卷盤、潤滑系統和噴淋系統。一個預備從站放在遠距離排土機控制室,用來控制排土機的運行。采用CC-Link現場總線技術實現整個大型物料裝卸系統的程序控制和通訊鏈路,其硬件配置如圖6所示。
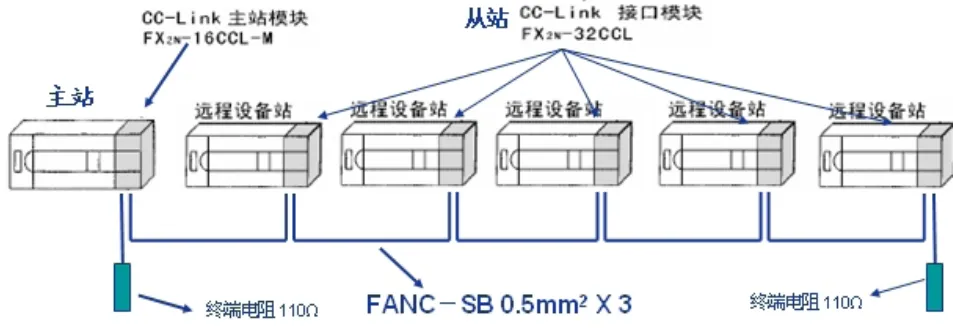
圖6 堆取料裝備CC-Link硬件配置圖
CC-Link主站(總控制中心、斗輪與俯仰控制)的配置是:采用 FX2N-16CCL-M作為主站模塊;CC-Link從站(司機室、行走和回轉、懸臂和尾車皮帶輸送機、動力和控制電纜卷盤、排土機)的配置是:采用FX2N-32CCL作為從站模塊。主站與5個從站之間采用專用雙絞電纜FANC-SB 0.5mm2х3CC-LINK進行串聯連接。主站和從站兩個終端要加入兩個110歐姆的終端電阻,用來屏蔽數據通訊中的干擾信號。CC-Link通訊連接配線設計如圖7所示。

圖7 CC-Link通訊連接配線設計
2.2 調速系統硬件設計

表1 堆取料機變頻器的選擇

表2 堆取料機PLC型號選擇
變頻器(Variable-frequency Drive,VFD)是應用微電子技術與變頻技術,通過改變電機工作電源頻率的方式來控制交流電動機轉速的電力控制設備。根據堆取料機大車行走機構、臂架回轉機構和斗輪取料機構所用電機功能參數和數量,選用以下三菱型號的變頻器,如表1所示。
2.3 基于CC-Link現場總線的可編程序控制器
根據懸臂式斗輪堆取料機各控制機構輸入輸出點數選擇三菱PLC型號總結如表2。
3 結束語
本文對懸臂式斗輪堆取料機提出了基于CCLink現場總線技術的控制系統。從控制系統組成的角度分析了電氣控制技術方案,結合高壓電源電氣控制技術和電纜卷筒電氣控制技術總結了懸臂式斗輪堆取料機整體電氣控制方案。進而介紹了懸臂式斗輪堆取料機控制技術的硬件設計,實現了相應的控制功能。
[1] 邵明亮,于國飛,耿華,等.斗輪堆取料機[M].北京:化學工業出版社,2007.
[2] 錢江濤.斗輪堆取料機主參數的選用[J].水利電力機械,2005,27(1):43-48.
[3] 李玉民,劉勤國.臂架型堆取料機俯仰液壓系統[J].起重運輸機械,2008,11:85-87.
[4] 夏少建.臂架式斗輪堆取料機取料平均生產能力的研究[J].起重運輸機械,2009.
[5] 何路茵.臂式斗輪堆取料機取料過程分析[J].機械研究與應用,2009.
[6] 謝則明.斗輪機平衡系統的調整[J].電力科學與工程,2008,24(6):46-47.
[7] 陳曉明.堆取料機俯仰液壓系統改造[J].科技信息,2010,21:463-464.
[8] 張洪信,趙清海.ANSYS有限元分析完全自學手冊[Z].北京:機械工業出版社,2008.
[9] 耿華.斗輪堆取料機工作裝置動態特性研究[D].吉林:吉林大學,2007.
[10] 江洪,王貴成,盧擇臨.SolidWorks高級曲線曲面實例解析[M].北京:機械工業出版社,2007.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
通信電源技術(2018年5期)2018-08-23 01:16:18
電子制作(2018年2期)2018-04-18 07:13:37
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年19期)2017-02-02 07:08:54
山東工業技術(2016年15期)2016-12-01 05:31:49
