高壓帶電作業(yè)機(jī)器人視覺(jué)伺服系統(tǒng)
2013-10-15 01:20:14王振利魯守銀趙玉良呂曦晨
制造業(yè)自動(dòng)化 2013年14期
王振利,魯守銀,李 健,趙玉良,呂曦晨
(山東電力集團(tuán)公司 電力科學(xué)研究院,濟(jì)南 250002)
0 引言
隨著社會(huì)數(shù)字化、信息化的不斷發(fā)展,電力供應(yīng)的連續(xù)性和可靠性顯得尤為重要。高壓帶電作業(yè)作為一種在高壓電氣設(shè)備不停電情況下進(jìn)行檢修、測(cè)試的作業(yè)方法,是避免檢修停電,保證正常供電的有效措施。
傳統(tǒng)的高壓帶電作業(yè)工作由人工完成,由于作業(yè)人員都處于高電壓、高空環(huán)境中,具有作業(yè)勞動(dòng)量大、作業(yè)危險(xiǎn)性大等缺點(diǎn)。隨著機(jī)器人技術(shù)的發(fā)展,機(jī)器人輔助或者代替人工,實(shí)現(xiàn)帶電作業(yè)已經(jīng)成為可能。
現(xiàn)有高壓帶電作業(yè)機(jī)器人系統(tǒng)一般采用主從控制方式(如圖1所示)。操作人員通過(guò)主手控制機(jī)械臂的運(yùn)動(dòng),實(shí)現(xiàn)高壓帶電作業(yè)。該控制方式仍需人工參與,無(wú)法擺脫高壓、高空的工作環(huán)境,且對(duì)操作人員的操作能力要求較高。

圖1 高壓帶電作業(yè)主從控制機(jī)器人
本文提出一種高壓帶電作業(yè)機(jī)器人視覺(jué)伺服系統(tǒng),該系統(tǒng)通過(guò)視覺(jué)方法獲取設(shè)備位置信息,并將該位置信息反饋機(jī)器人控制系統(tǒng),形成伺服控制系統(tǒng)。利用該系統(tǒng)可在無(wú)人參與的情況下,實(shí)現(xiàn)高壓帶電作業(yè),提高作業(yè)自動(dòng)化水平和作業(yè)效率。
1 系統(tǒng)概述
如圖2所示,高壓帶電作業(yè)機(jī)器人視覺(jué)伺服系統(tǒng)由機(jī)器人控制單元、高壓帶電作業(yè)機(jī)器人、雙目相機(jī)和視覺(jué)定位單元組成。系統(tǒng)通過(guò)雙目立體相機(jī)獲取作業(yè)現(xiàn)場(chǎng)圖像,視覺(jué)定位單元對(duì)獲取圖像進(jìn)行分析處理,得到設(shè)備的位置信息,機(jī)器人控制單元接收該位置信息,實(shí)現(xiàn)高壓帶電作業(yè)機(jī)器人的閉環(huán)伺服控制。
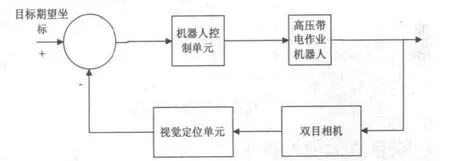
圖2 高壓帶電作業(yè)機(jī)器人視覺(jué)伺服系統(tǒng)框圖
在該伺服系統(tǒng)中,雙目相機(jī)需事先實(shí)現(xiàn)標(biāo)定,以消除相機(jī)自身存在的畸變和左右相機(jī)極線的水平一致。
視覺(jué)定位單元將雙目相機(jī)采集的圖像信號(hào)轉(zhuǎn)換為機(jī)器人控制單元可以接收的位置信號(hào),是系統(tǒng)中最重要的部分。
本系統(tǒng)利用雙目立體視覺(jué)相關(guān)算法并結(jié)合目標(biāo)跟蹤算法實(shí)現(xiàn)圖像信號(hào)的處理,并獲取設(shè)備位置信號(hào),其具體實(shí)現(xiàn)方式將在下一節(jié)做詳細(xì)說(shuō)明。
2 視覺(jué)定位
在立體視覺(jué)領(lǐng)域,通過(guò)分析雙目立體相機(jī)采集的左右兩幅圖像可以方便獲取圖像的三維信息,然而該方法運(yùn)算量大,如果處理整幅圖像很難滿足實(shí)時(shí)性的要求,為此本文對(duì)算法做了相應(yīng)的改進(jìn),在立體視覺(jué)算法前加入了目標(biāo)跟蹤算法,將立體視覺(jué)跟蹤算法限定在目標(biāo)跟蹤窗內(nèi)的有限區(qū)域內(nèi),降低算法運(yùn)算量,提高算法的實(shí)時(shí)性。
圖3為視覺(jué)定位方法的流程框圖。其中,初始化操作作用是人工指定圖像中要操作設(shè)備的感興趣區(qū)域;卡爾曼濾波用于消除設(shè)備跟蹤過(guò)程中出現(xiàn)的錯(cuò)誤,提高跟蹤的準(zhǔn)確性。
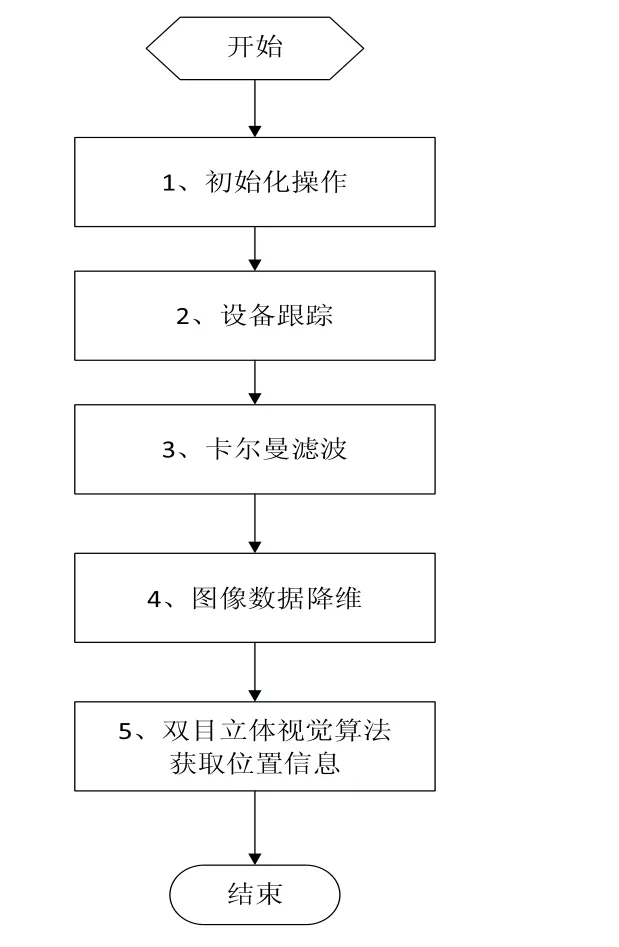
圖3 視覺(jué)定位流程圖
2.1 雙目立體視覺(jué)算法
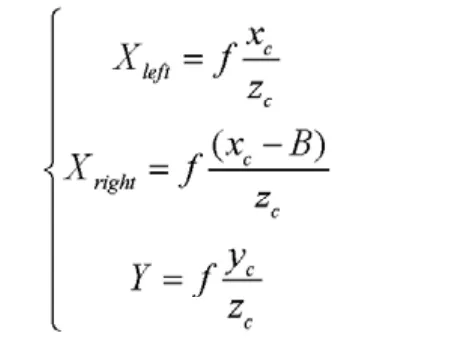
雙目立體視覺(jué)算法是基于視差原理(如下圖所示)。其中基線距 為左右兩攝像機(jī)的投影中心連線的距離,相機(jī)焦距為 。
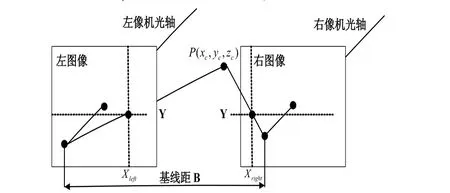
圖4 雙目立體成像原理圖

假定兩攝像機(jī)在同一個(gè)平面上,則特征點(diǎn)的圖像坐標(biāo) 坐標(biāo)相同,則由三角幾何關(guān)系得到:
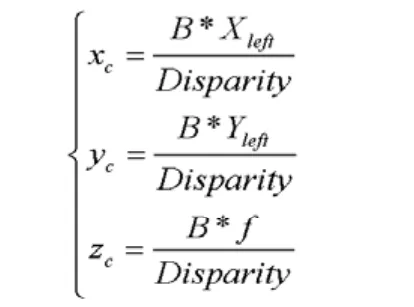
因此,左相機(jī)像面上的任意一點(diǎn)只要能在右相機(jī)像面上找到對(duì)應(yīng)的匹配點(diǎn),就可以確定出該點(diǎn)的三維坐標(biāo)。這種方法是完全的點(diǎn)對(duì)點(diǎn)運(yùn)算,像面上所有點(diǎn)只要存在相應(yīng)的匹配點(diǎn),就可以參與上述運(yùn)算,從而獲取其對(duì)應(yīng)的三維坐標(biāo)。
遍歷左右圖像中的所有點(diǎn)類似點(diǎn)對(duì),計(jì)算左右視圖的視差,根據(jù)上述算法實(shí)現(xiàn)設(shè)備三維點(diǎn)云信息的獲取。
正如前文所述,如果處理整幅圖像很難滿足實(shí)時(shí)性的要求,為此本文、在立體視覺(jué)算法前加入了目標(biāo)跟蹤算法,將立體視覺(jué)跟蹤算法限定在目標(biāo)跟蹤窗內(nèi)的有限區(qū)域內(nèi),提高算法的實(shí)時(shí)性。
2.2 目標(biāo)跟蹤算法
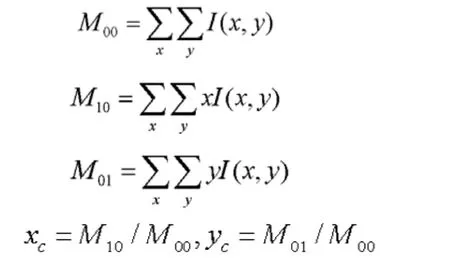
本文目標(biāo)跟蹤算法采用Ca m Sh if t算法。Cam Shift算法能有效解決目標(biāo)變形和遮擋的問(wèn)題,對(duì)系統(tǒng)資源要求不高,時(shí)間復(fù)雜度低,在簡(jiǎn)單背景下能夠取得良好的跟蹤效果。其實(shí)現(xiàn)步驟包括顏色概率分布計(jì)算、Mean Shift算法和Cam shift目標(biāo)跟蹤。
1)顏色概率分布計(jì)算
圖像RGB顏色空間對(duì)光照亮度變化較為敏感,為了減少此變化對(duì)跟蹤效果的影響,首先將圖像從RGB空間轉(zhuǎn)換到HSV空間,然后對(duì)其中的H分量作統(tǒng)計(jì)直方圖,直方圖數(shù)據(jù)代表了不同H分量值在圖像中出現(xiàn)的概率,將圖像中每個(gè)像素的值用其H分量出現(xiàn)的概率替換,就得到了顏色概率分布。
2)Mean Shift算法
Mean Shift算法是一種密度函數(shù)梯度估計(jì)的非參數(shù)方法,該算法通過(guò)迭代尋優(yōu)找到概率分布的極值來(lái)定位目標(biāo),其實(shí)現(xiàn)過(guò)程如下:
(1) 首先在圖像顏色概率分布中選取跟蹤窗;
(4) 移動(dòng)跟蹤窗的中心到質(zhì)心,如果移動(dòng)距離大于預(yù)設(shè)的固定閾值,則重復(fù)b、c和d,直到跟蹤窗的中心與質(zhì)心間的移動(dòng)距離小于預(yù)設(shè)的固定閾值,或者循環(huán)運(yùn)算的次數(shù)達(dá)到某一最大值,停止計(jì)算。
3)Cam shift目標(biāo)跟蹤
將m eanshift算法擴(kuò)展到連續(xù)圖像序列,就是cam shift算法。它將視頻的所有幀做m eanshift運(yùn)算,并將上一幀的結(jié)果,即搜索窗的大小和中心,作為下一幀m eanshift算法搜索窗的初始值。如此迭代下去,就可以實(shí)現(xiàn)對(duì)目標(biāo)的跟蹤。
在背景較為復(fù)雜,或者有許多與目標(biāo)顏色相似像素干擾的情況下,因?yàn)镃am Shift算法只考慮顏色直方圖,忽略了目標(biāo)的空間分布特性,會(huì)導(dǎo)致跟蹤失敗,所以這種情況下需加入卡爾曼濾波來(lái)過(guò)濾跟蹤過(guò)程中出現(xiàn)的錯(cuò)誤。
2.3 卡爾曼濾波
在目標(biāo)跟蹤過(guò)程中,目標(biāo)的位置、速度、加速度等測(cè)量值往往在任何時(shí)候都有噪聲。卡爾曼濾波利用目標(biāo)的動(dòng)態(tài)信息,能設(shè)法去掉噪聲的影響,得到一個(gè)關(guān)于目標(biāo)位置的好的估計(jì)。
本文將目標(biāo)窗口的位置和移動(dòng)速度作為的觀察值,利用卡爾曼濾波算法實(shí)現(xiàn)對(duì)觀察值的準(zhǔn)確估計(jì),進(jìn)而修正目標(biāo)跟蹤的結(jié)果,實(shí)現(xiàn)目標(biāo)的準(zhǔn)確跟蹤。卡爾曼濾波的使用能有效的降低在目標(biāo)跟蹤過(guò)程中出現(xiàn)的錯(cuò)誤跟蹤,提高跟蹤的準(zhǔn)確性,進(jìn)而提高算法的有效性。
3 實(shí)驗(yàn)數(shù)據(jù)和分析
為驗(yàn)證本文算法的算法實(shí)時(shí)性,在視頻中連續(xù)抽取十幀圖像,分別采用整幅圖像雙目運(yùn)算和本文算法,統(tǒng)計(jì)其運(yùn)行時(shí)間,其結(jié)果如圖5所示。
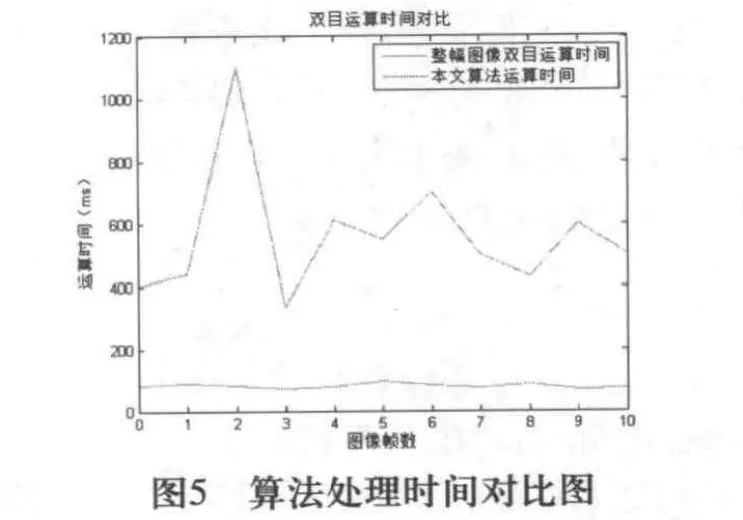
圖5 算法處理時(shí)間對(duì)比圖
從上圖可以發(fā)現(xiàn),整幅圖像雙目算法運(yùn)行單幀圖像運(yùn)行時(shí)間較長(zhǎng),大都大于400m s,無(wú)法滿足實(shí)時(shí)性的要求,且由于算法運(yùn)行的時(shí)間與圖像的復(fù)雜度存在很大關(guān)系,導(dǎo)致算法運(yùn)行時(shí)間的方差較大,算法穩(wěn)定性較差。
本文算法由于采用了目標(biāo)跟蹤算法,算法運(yùn)算可以限制在設(shè)備范圍以內(nèi),運(yùn)算量大為縮減,運(yùn)行時(shí)間相對(duì)較短,基本保證在100m s以內(nèi),可以滿足算法實(shí)時(shí)性的要求,且由于設(shè)備范圍內(nèi)圖像復(fù)雜度相對(duì)穩(wěn)定,從而保證算法運(yùn)行時(shí)間的方差較小,算法穩(wěn)定性得到大大提高。
為驗(yàn)證本文算法的有效性,將本文算法實(shí)際應(yīng)用于高壓帶電作業(yè)機(jī)器人系統(tǒng),并將相機(jī)坐標(biāo)系坐標(biāo)轉(zhuǎn)換為機(jī)器人工具坐標(biāo)系坐標(biāo),分析其水平X(水平)方向、Y(豎直)方向和Z(距離)方向隨時(shí)間變化的關(guān)系,分析算法的有效性。
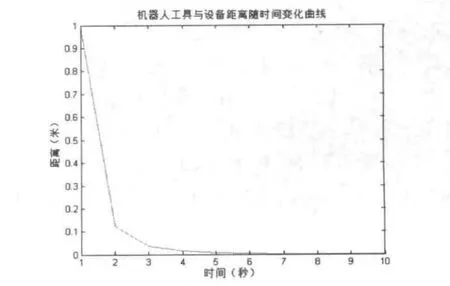
圖6 機(jī)器人工具與設(shè)備距離變化曲線
本文以Z方向?yàn)槔f(shuō)明算法的有效性。上圖為機(jī)器人工具與設(shè)備距離隨時(shí)間變換的變化曲線,從圖中可以看到,本文算法能保證其迅速收斂,在時(shí)間大于6秒時(shí),該距離已收斂為0,從而保證了算法的有效性。
4 結(jié)束語(yǔ)
本文提出一種高壓帶電作業(yè)機(jī)器人視覺(jué)伺服系統(tǒng),該系統(tǒng)通過(guò)視覺(jué)方法獲取設(shè)備位置信息,并將該位置信息反饋機(jī)器人控制系統(tǒng),形成伺服控制系統(tǒng)。通過(guò)實(shí)驗(yàn)表明,該系統(tǒng)滿足應(yīng)用的實(shí)時(shí)性和有效性要求,可在無(wú)人參與的情況下,實(shí)現(xiàn)高壓帶電作業(yè),提高作業(yè)自動(dòng)化水平和作業(yè)效率,具有極高的應(yīng)用推廣價(jià)值。
[1] 魯守銀,馬培蓀,戚暉,厲秉強(qiáng).高壓帶電作業(yè)機(jī)器人的研制[J].電力系統(tǒng)自動(dòng)化,2003,17.
[2] 陳亮,楊汝清,謝霄鵬.基于視覺(jué)的高壓帶電清掃機(jī)器人瓷瓶自動(dòng)定位伺服系統(tǒng)[J].機(jī)器人,2004,2.
[3] 高宏偉.計(jì)算機(jī)雙目立體視覺(jué)[M].中國(guó):電子工業(yè)出版社 ,2012.
[4] Saw ada J;Kusum oto K;Maikaw a Y. A Mobile Robot for Inspection of Pow er Transm ission Lines[J]. IEEE Trans on Pow er Delivery,1991,6(1):309-315.
[5] Nakash im a M;Yano K;Maruyam a Y. The Ho t Line Work Robot System "Phase Ⅱ” and Its Hum an-robot Interface”Mos” [J].Proc of the IEEE/RSJ Inter Con f on Intelligen t Robo ts and System s,1995,2:116-123.
[6] Santam aria A;Aracil R;Tuduri A. Teleoperated Robots for Live Pow er Lines Maintenance (ROBTET) [J]. In:Proc o f 14th International Conference and Exhibition on Electricity Distribution,1997,3(31):1-5.
[7] Yi H;Jiansheng C.The Research of the Automatic Washingbrushing Robot of 500 kV DC Insu lator String[J].In:Proc of the 6th International Conference on Transm ission and Distribution Construction and Live Line Maintenance,1994:411-424.
[8] GODZHIEV C M.Testing the covarian ce m atrix o f a renovation sequence under operating o f the Kalm an filtor[J].Autom ation and Rem ote Contro l,1996,57(7):1046-1052.
[9] Lowe D.Distinctive im age features from scale-invariant keyp o in ts[A].In ternationa l Jou rnal o f Com p u ter Vision[C].2004:91-110.
[10] Boyer M.System Intergration in Telerobotics:Case Study:Main tenance o f Electric Pow er Lines[A][J].IEEE International Con ference on Robotics and Autom ation M inneapo lis[C].M innesota,1996.
