基于EC-RBF學(xué)習(xí)算法的機械臂運動學(xué)逆解研究
2013-10-15 01:20:14楊劍鋒
制造業(yè)自動化 2013年14期
關(guān)鍵詞:機械
張 翠,楊劍鋒,張 峰
(蘭州交通大學(xué),蘭州 730070)
0 引言
機械臂運動學(xué)逆問題指給定機械臂末端執(zhí)行器的空間位姿,求解為達到該位姿而所需的關(guān)節(jié)變量[1],是正問題的反向求解過程。現(xiàn)有求解方法主要有代數(shù)法、幾何法、迭代法以及基于神經(jīng)網(wǎng)絡(luò)的求解方法[2~6]等。利用神經(jīng)網(wǎng)絡(luò)來進行機械臂逆運動學(xué)求解,以滿足控制器設(shè)計中的精度要求及解決多值性問題[6],成為一種極為有效的途徑。
本文采用熵聚類學(xué)習(xí)算法來訓(xùn)練RBF神經(jīng)網(wǎng)絡(luò)(En tropy Clustering RBF,EC-RBF),對機械臂運動學(xué)逆問題進行辨識求解,在滿足一定精度要求的同時加速網(wǎng)絡(luò)訓(xùn)練過程,為下一步控制器設(shè)計問題中的實時性問題提供可能。
1 機械臂運動學(xué)分析
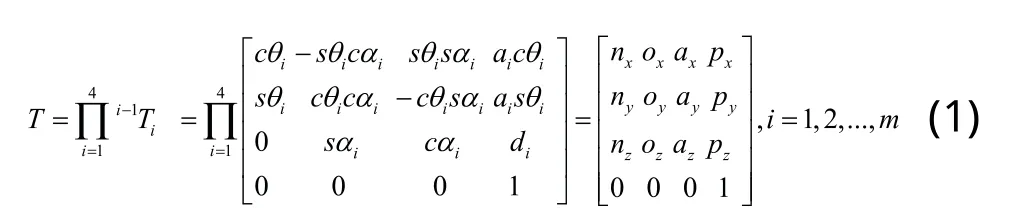
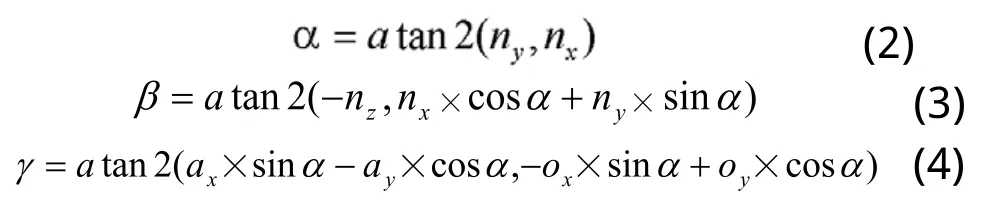
本文研究對象為自主研發(fā)的具有四個自由度的教學(xué)用關(guān)節(jié)型機械臂,由三個旋轉(zhuǎn)關(guān)節(jié)以及一個自由旋轉(zhuǎn)底座構(gòu)成,實現(xiàn)在空間內(nèi)運動。分析其運動學(xué)問題,采用Denavit-Hartenberg(D-H)方法建立其運動學(xué)方程,根據(jù)機械臂實際參數(shù)計算相鄰關(guān)節(jié)變換矩陣,其中 為連桿扭角, 為連桿長度、 為連桿距離,且均為常量分; 為關(guān)節(jié)變量。機械臂末端執(zhí)行器相對于基坐標系的總變換矩陣為:
2 EC-RBF神經(jīng)網(wǎng)絡(luò)算法
EC-RBF神經(jīng)網(wǎng)絡(luò)算法,先通過熵聚類算法確定聚類中心初值和聚類數(shù)目,再利用K-m eans算法進一步調(diào)整和修改RBF函數(shù)的中心值和寬度。熵聚類算法實現(xiàn)的步驟大體分為4步[7,8],在文獻中有詳述,這里不再贅述。本文中EC-RBF神經(jīng)網(wǎng)絡(luò)算法具體步驟如下:
4)判斷所有的訓(xùn)練樣本且中心分布是否不再變化。在實際應(yīng)用過程中,只要中心的變化(設(shè)定值),可認為中心不再有任何變化。否則,轉(zhuǎn) 2)繼續(xù)。
5)寬度半徑 等于每個聚類中心與屬于該類的樣本之間的平均距離,即:

6)輸出權(quán)值 采用線性的偽逆算法來調(diào)整,R為網(wǎng)絡(luò)隱節(jié)點輸出, 為網(wǎng)絡(luò)期望輸出,即
由于省去了網(wǎng)絡(luò)學(xué)習(xí)算法過程中尋找初值和聚類數(shù)的迭代計算量,因而能夠保證RBF神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)的快速性。
3 機械臂運動學(xué)逆解的EC-RBF實現(xiàn)
2)訓(xùn)練EC-RBF神經(jīng)網(wǎng)絡(luò)
選取1500組數(shù)據(jù),采用EC-RBF算法來訓(xùn)練神經(jīng)網(wǎng)絡(luò)。經(jīng)過多次試驗,最優(yōu)參數(shù)取表1為從網(wǎng)絡(luò)輸出的逆解結(jié)果中截取的關(guān)節(jié)角的部分數(shù)據(jù),并與目標值比較。

表1 關(guān)節(jié)角 部分逆解結(jié)果
3)測試網(wǎng)絡(luò)泛化能力

圖1 測試輸出誤差
4)兩種算法的比較
具體內(nèi)容及運行結(jié)果如表2所示。EC-RBF學(xué)習(xí)算法中所得聚類中心數(shù)目分別為43和139。
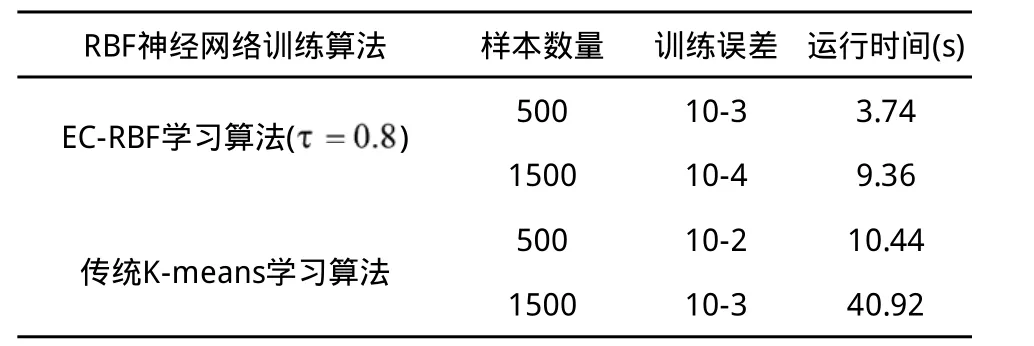
表2 兩種算法的比較
分析上述結(jié)果,由表1可以看到網(wǎng)絡(luò)實際輸出與期望輸出的均方誤差數(shù)量級基本上控制在10-3,符合網(wǎng)絡(luò)設(shè)計之初的目標。由網(wǎng)絡(luò)的測試輸出可以看到,基于熵聚類算法的EC-RBF神經(jīng)網(wǎng)絡(luò)具有很好的泛化能力,對于網(wǎng)絡(luò)訓(xùn)練樣本之外的數(shù)據(jù)仍然有很好的計算能力,能夠滿足機械臂關(guān)節(jié)角度的精度要求,對機械臂運動學(xué)逆解問題具有很好的解決能力。在網(wǎng)絡(luò)訓(xùn)練過程中,相比傳統(tǒng)K-m eans算法,EC-RBF算法計算精度更高,且在訓(xùn)練樣本數(shù)量較大時,極大的加速了數(shù)據(jù)聚類過程,從而提高RBF網(wǎng)絡(luò)的訓(xùn)練速度,為機械臂控制器設(shè)計節(jié)省了時間,以達到實時性要求。
4 結(jié)論
基于熵聚類學(xué)習(xí)算法的EC-RBF神經(jīng)網(wǎng)絡(luò),在很大程度上克服了傳統(tǒng)K-m eans學(xué)習(xí)算法在中心值和類別數(shù)初值取值上的不確定性,使其更快速收斂,從而加速網(wǎng)絡(luò)的訓(xùn)練過程。將EC-RBF神經(jīng)網(wǎng)絡(luò)用于機械臂的運動控制中,仿真結(jié)果表明在求解機械臂逆問題過程中,避免了繁瑣的公式推導(dǎo),在數(shù)據(jù)樣本巨大時,大大的減小了計算量,比運用傳統(tǒng)RBF網(wǎng)絡(luò)進行逆問題求解具有更快的處理速度,并且具有很好的求解精度。同時,也為后續(xù)機械臂嵌入式運動控制器的開發(fā)與實現(xiàn)提供了理論基礎(chǔ)。
[1] 蔡自新.機器人學(xué)(第二版)[M].北京:清華大學(xué)出版社,2007.
[2] 楊國軍,崔平遠.機械手逆運動學(xué)神經(jīng)網(wǎng)絡(luò)建模與仿真[J].系統(tǒng)工程與電子技術(shù),2001,23(1):55-58.
[3] Li Zhem ing, Li Chungui, Lv Shao jiao. A Method fo r So lving Inverse Kinem atics o f PUMA560 Manipu lator Based on PSO -RBF Netw o rk[C]//8th In ternational Con ference on Natu ral Com pu tation , 2012:298-301.
[4] 榮盤祥,楊晶,胡林果,馬廣富.基于RBF網(wǎng)絡(luò)的SCARA機器人的運動學(xué)逆解[J].電機與控制學(xué)報,2007,11(3):303-305.
[5] 盛黨紅,溫秀蘭,黃文良.基于免疫進化神經(jīng)網(wǎng)絡(luò)的機械手逆運動控制[J].中國機械工程,2007,18(3):282-285.
[6] 陳勇,鄭加強,郭偉斌.除草機器人機械臂運動分析與控制[J].農(nóng)業(yè)機械學(xué)報,2007,38(8):105-108.
[7] 王華麗,周尚波.基于熵聚類的RBF神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)算法[J].計算機仿真,2008,25(11):168-171.
[8] J.Yao,M.Dash, S.T. Tan, et al. En tropy-based Fuzzy Clustering and Modeling [J]. Fuzzy Sets and System s,2000, 113(3)382-388.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
