基于C A T I A二次開發的月牙肋鋼岔管輔助設計系統開發與應用
2013-10-08 02:28:18伍鶴皋
水力發電 2013年7期
付 山,伍鶴皋,汪 洋
(武漢大學水資源與水電工程科學國家重點實驗室,湖北 武漢 430072)
0 引 言
水電站月牙肋鋼岔管是由三梁式岔管不斷改進演變而成的一種新型的岔管,具有受力條件好,制作簡單,岔管內流體流態較好,水頭損失較小等優點,在大中型水電站和抽水蓄能電站中得到廣泛的應用[1].但月牙肋岔管體形結構復雜,同時隨著月牙肋岔管形式的演變,設計和計算的工作量逐步加重,如何快速、正確地完成岔管設計已成為迫切需要解決的問題.
CATIA軟件在汽車、航空、航天等一些高端技術制造領域得到廣泛的應用,它具有強大的曲面造型功能和先進的參數化設計理念,并且為了滿足用戶專業化設計需要,它提供了多種二次開發接口.CATIA主要的二次開發方式有:自動化對象編程(Automation API)和開放的基于構件的應用編程(CAA-RADE),前者功能有限,卻足以滿足該系統的開發要求,且較容易掌握,后者功能強大,但應用難度較大.我國水電行業自2006年引入CATIA以來,在廠房、大壩、閘門和地質等方面的三維可視化設計取得了一定的進展,但在岔管結構設計領域還缺乏基于CATIA二次開發的研究和應用.針對以上情況,本文以蟠龍抽水蓄能電站月牙肋鋼岔管為例,利用Automation API二次開發接口,在Visual Basic 6.0的程序開發平臺下,著重進行了水電站Y形月牙肋鋼岔管輔助設計系統的CATIA二次開發.
1 開發思路
(1)深入研究月牙肋鋼岔管的幾何體形,確定岔管幾何體形控制參數.
(2)運用CATIA交互式操作尋找初步設計方案.
(3)利用VB語言編寫主程序 (部分代碼段可以利用宏),并驗證初步方案的可行性,最終確定設計方案.
(4)提取CATIA幾何建模、網格剖分及導出ANSYS的命令流所需要的控制參數.
(5)進行程序界面設計,完善程序的各項功能,最終完成調試.
最終確定的程序設計方案為:通過VB語言中getobject()函數和creatobject()函數的聯合使用實現對CATIA二次開發接口的連接;在自制程序界面上輸入參數后,可實現在CATIA中自動建模和網格自動剖分,再通過自制程序的一鍵轉換功能將CATIA中網格單元節點信息文件轉換為ANSYS可讀入的*.dat命令流文件,該命令流導入ANSYS后生成的為已經完成前處理和荷載加載的網格模型,可直接進行有限元計算.為了較好地模擬管殼受力,管殼和肋板均采用殼單元進行有限元計算.模型主要包括管殼、肋板和水壓試驗工況的悶頭.管殼由對各管段兩端的曲線曲面橋接得到,在肋板中面繪制外輪廓草圖進而曲面填充操作得到肋板,對直管段端口平面上的草圖圓進行半球操作得到悶頭.
2 三維建模特征參數計算
月牙肋岔管包括殼體和月牙肋板兩部分,月牙肋岔管殼體又分為主錐管和支錐管兩部分.主錐管一般由一個倒錐管組成,支錐管由兩個正錐管組成,三者有一個公切球.肋板由月牙狀的鋼板做成,肋板的外緣線以相貫線為基礎向管殼外適當加寬50~100 mm,以滿足管殼與肋板焊接縫的位置要求,內緣則為一拋物線[1],如圖1所示.
CATIA具有先進的草圖設計理念,可將三維設計通過骨架設計理念簡化為較易的二維設計.為了便于在CATIA中建模計算,本文共采用三個計算坐標系,如圖1所示.主管C的計算坐標系為XYZ,支管A的計算坐標系為X′Y′Z,支管B的計算坐標系為X″Y″Z,其中Z軸垂直紙面向外,并將坐標系XYZ定為全局坐標系統.求出主 (支)管在相應坐標系下的關鍵點 (岔管平面圖上的腰線轉折點和直管段的端點)坐標進而精確定位草圖平面.各坐標系下關鍵點坐標和相貫線方程推導如下 (取中面):主錐管C的方程為
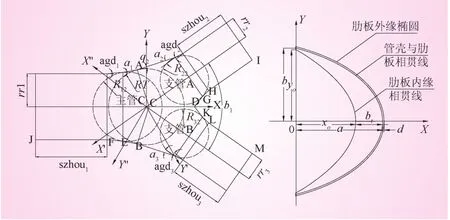
圖1 岔管計算參數示意

支錐管A在全局坐標系下的方程為

式中,t11為主錐C厚度;t21為支錐管A厚度;θ為X軸與X′軸逆時針所成的角.
支錐管A與XZ平面相交即得兩支管的相貫線CD,方程為

點A的坐標為主錐管C和支錐管A的腰線相交點,坐標記為XA,YA,ZA.點C為相貫線CD與主錐管C的交點,坐標記為XC,YC,ZC.所以相貫線CA所在面的方程為

方程(1)和方程(4)聯立可得相貫線AC的方程,相貫線BC的方程也同理可求.
肋板外緣由管殼與肋板相貫線CD外延d形成,如圖1,肋板內緣為一條拋物線,該拋物線經過C點正下方并與管殼內表面相切且關于xoy面對稱,因而只需知道拋物線的頂點即可確定該拋物線方程.頂點坐標為(XD-bt,0)拋物線的焦距為

式中,XD為D點的X方向坐標.
3 軟件介紹
3.1 整體框架
最終確定的程序方案是在Microsoft Windows 7操作系統下,利用Visual Basic6.0程序開發語言和CATIA V5 R17平臺,開發出的水電站月牙鋼岔管計算機輔助設計可視化系統,該程序的運行框架如圖2所示.
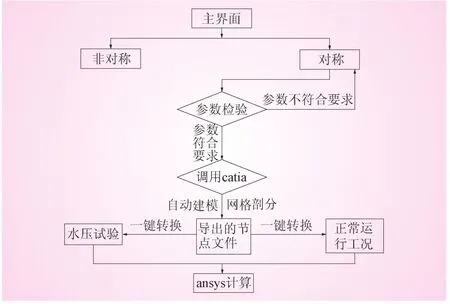
圖2 程序流程
軟件擁有美觀、簡便的基于Windows操作系統的交互式界面,程序實現了對月牙肋岔管的快速自動建模和網格剖分,以及一鍵轉換生成能被ANSYS直接讀入的節點信息文件,并且能夠在ANSYS中直接進行有限元計算.文件均以*.dat的形式保存.
3.2 界面設計
本程序包括登陸界面,主界面和參數輸入界面3個界面.登陸窗口是在未授權的計算機打開該程序時出現,一旦計算機經過授權后,則程序每次啟動直接進入主界面.主界面是參數輸入界面的入口,本次程序只設計了一個過渡管節的Y形的月牙肋鋼岔管模塊.參數輸入界面包含菜單欄、選項卡.菜單欄包括參數檢驗,CATIA成圖,一鍵轉換等功能.選項卡則包括岔管幾何體形參數,網格剖分參數和荷載以及材料參數輸入界面.
3.3 網格剖分
網格剖分順序為:直管段→過渡管段→錐管段→肋板→悶頭.網格剖分幾個控制參數分別為:GlobalSize(全局尺寸)、 tolerance(容差)、Constraint sag(控制垂度).
本程序使用CATIA的surface mesh網格劃分方式,該方式將默認盡量保證網格為正方形,所以對于管殼,只要指定相應管段的環向份數即可.岔管腰線轉折角比較小,相鄰管節管徑變化不大,為了保證網格的均勻,過渡平順,主 (支)管各管段建議采用相同的剖分份數,再根據設置好的環向份數 推算出相應管節的網格全局尺寸大小,即GlobalSize=2XπXRi/Nr,其中,Ri為管段進口半徑.肋板的形狀不太規則,且由于共節點問題,肋板網格的全局尺寸要受支錐網格大小影響,故肋板的網格全局尺寸Globalsize(肋板)=GlobalSize(支錐)Xa,其中,a(0~1)為肋板網格大小率,推薦取值0.6~0.8.悶頭是與直管段連接的半球面,故悶頭網格全局尺寸要和相應直管段的網格全局尺寸相等.每次劃分網格需要設置好相應的tolerance(容差)和Constraint sag(控制垂度),推薦tolerance=GlobalSize/5,Constraint sag=GlobalSize/10.
4 工程實例
本文選取重慶市蟠龍抽水蓄能電站工程實例進行分析.在軟件界面設置好相應的參數,即可快速完成月牙肋岔管模型的建立和網格的剖分,一鍵生成*.dat文件后導入ANSYS中進行有限元計算,網格剖分結果和有限元計算結果如圖3~5所示.在管殼體形和管壁厚度等條件相同的情況下,將計算結果與設計院提供的結果 (肋板采用實體單元)作對比,如表1所示,管殼關鍵點為管殼外輪廓的轉折點和相貫線的交點.
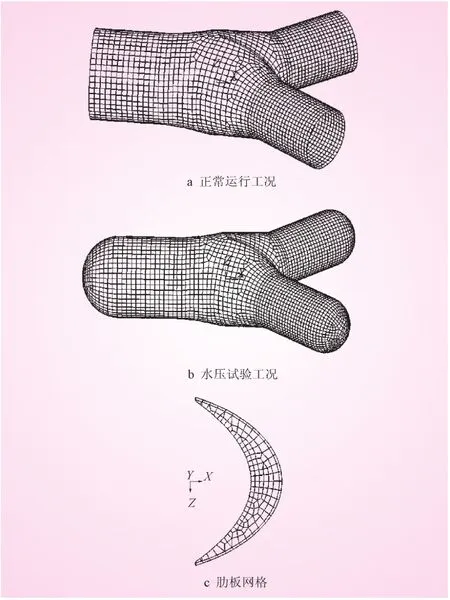
圖3 模型網格
從表1可以看出,本程序計算結果和設計院的計算結果相比,各關鍵點Mises應力值及其他控制應力值大小相差不超過3%,在工程設計誤差允許的范圍內,證明了本程序的可靠性.
圖4 正常運行工況鋼岔管Mises應力(單位:MPa)
圖5 水壓試驗工況Mises應力(單位:MPa)

表1 正常運行工況下岔管管殼各關鍵點和肋板Mises應力結果對比MPa
5結 語
基于CATIA的二次開發的月牙肋鋼岔管輔助設計系統充分利用了CATIA的建模優勢和先進的網格自動剖分功能,可快速得到用戶所需要的有限元網格,同時它又很好地實現了CATIA到ANSYS的連接,最終在ANSYS中快速完成有限元計算,省去了重復的手工操作,縮短了設計周期.
利用Automation API進行CATIA的二次開發工作,開發模式簡單、界面友好.從本系統的開發過程和結果來看,以CATIA為平臺,實現月牙肋鋼岔管三維參數化設計是可行的,同時此系統的開發思路也可以運用到其他工程構件尤其是其他形式的水電站鋼岔管的輔助設計系統開發過程中,具有廣闊的應用前景.
[1] 馬善定,伍鶴皋,秦繼章.水電站壓力管道 [M].武漢:湖北科學技術出版社,2002.
[2] 胡挺,吳立軍.CATIA二次開發技術基礎[M].北京:電子工業出版社,2006.
[3] 盛選禹,李明志.CATIA有限元網格剖分教程[M].北京:機械工業出版社,2009.
[4] 李斌等編著.基于CATIA V5 R20的水利水電工程三維設計應用教程[M].鄭州:黃河水利出版社,2011.
[5] 張婕.基于CATIA二次開發的錐形石英燈加熱器參數化設計[J].科學與技術工程,2011,11(25):124-127.
[6] 喬淑娟,羅京龍,伍鶴皋.月牙肋岔管體型優化與設計[J].中國農村水利水電,2004(12):118-120.
[7] 杜芳琴,伍鶴皋,石長征.月牙肋鋼岔管設計中若干問題的探討[J].水電能源科學,2012,30(8):135-137.
[8] 王娟玲,田玲.水電站工程中月牙肋岔管表面交線研究 [J].人民黃河,2009,31(9):101-103.
[9] 曹麗培.Visual Basic程序設計[M].北京:清華大學出版社,2012.
[10] 張社榮,顧巖,張宗亮.水利水電行業中應用三維設計的探討[J].水力發電學報,2008,12(3):67-71.
猜你喜歡
當代陜西(2020年13期)2020-08-24 08:22:02
甘肅科技(2020年20期)2020-04-13 00:30:02
模具制造(2019年3期)2019-06-06 02:11:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
制造技術與機床(2017年5期)2018-01-19 02:49:17
制造技術與機床(2017年11期)2017-12-18 06:47:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
濰坊學院學報(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04