混流式水輪機組的模糊滑模控制
2013-09-22 06:56:02楊敏軍
電氣傳動自動化 2013年4期
楊敏軍
(三峽大學(xué)電氣與新能源學(xué)院,湖北宜昌443002)
1 引言
隨著低碳環(huán)保時代的到來,低能耗的發(fā)電廠將會有更大的發(fā)展前途,其中尤以核電廠與以生產(chǎn)再生能源形式的企業(yè)為主。目前,零碳發(fā)電廠的水電能源占世界電能的19%[1],在很大程度上解決了能源短缺問題。一般情況下,一個典型的水力發(fā)電系統(tǒng)由水庫、引水管道、調(diào)壓室、水輪機、調(diào)速器、發(fā)電機以及電網(wǎng)組成。該系統(tǒng)是一個集水力、機械能與電能相交織在一起的復(fù)雜的動態(tài)系統(tǒng)[2]。由于工作的狀態(tài)不同,系統(tǒng)內(nèi)部參數(shù)也會隨著外部環(huán)境變動而變化。也正是因為這種特性給設(shè)計性能更好的調(diào)速系統(tǒng)帶來了很大的困難。正如很多水電行業(yè)的專家認為,水電站中關(guān)鍵設(shè)備之一就是調(diào)速器。最近十幾年水輪機調(diào)速器控制方法已經(jīng)有很多種探討,總的來說可以分為兩類[3]。一類就是比例、積分、微分型(PID)調(diào)速系統(tǒng);另一類就是狀態(tài)反饋或者稱為智能型調(diào)速系統(tǒng)(IC)。經(jīng)典PID調(diào)速系統(tǒng)著重于系統(tǒng)輸出量,根據(jù)當(dāng)前時刻的誤差量(P)、誤差累積量(I)以及誤差的變化速率(D)來調(diào)整控制輸入量。該方法丟失了該系統(tǒng)內(nèi)部信息,現(xiàn)代控制理論不僅利用輸出量信息,而且把系統(tǒng)內(nèi)部狀態(tài)作為參考從而更好地達到對輸出量理想的控制效果。隨著智能控制理論的發(fā)展,如預(yù)測控制、智能控制、魯棒控制等[1-3],這些控制技術(shù)逐漸應(yīng)用于水輪機調(diào)速系統(tǒng)。
滑模控制(SMC)是一種變結(jié)構(gòu)控制(SVC),是一種利用切換頻率很快的開關(guān)控制策略來對動態(tài)的非線性系統(tǒng)完成非線性反饋控制方法[4]。滑模控制最大的優(yōu)點在于它有很好的魯棒性。對于水輪機調(diào)速器抗干擾性能方面有很大改善。但是,“抖振”問題一直是單一滑模控制的最大缺點。本文將模糊控制和滑模控制相結(jié)合,不但解決了該問題,而且使調(diào)速系統(tǒng)對干擾和參數(shù)變化具有很好的魯棒性。
2 水輪機調(diào)節(jié)系統(tǒng)數(shù)學(xué)模型
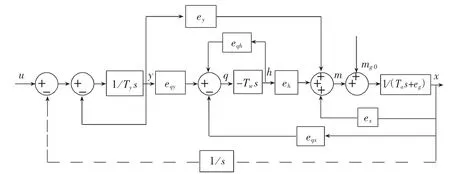
圖1 水輪機調(diào)節(jié)系統(tǒng)框圖
如圖1所示為某一水輪機組系統(tǒng)單機帶孤立負荷時的框圖,該系統(tǒng)主要由電液隨動系統(tǒng)、引水系統(tǒng)、水輪機系統(tǒng)、發(fā)電機、電網(wǎng)等組成。在小波動情況下可用線性模型來分析其結(jié)構(gòu)。圖1中u為控制輸入信號,h為水頭相對偏差值,x為轉(zhuǎn)速相對偏差值,y為接力器行程相對偏差值,q為流量相對偏差值,mt為水輪機主動力矩相對偏差值,mg0為負載擾動,Ty為接力器時間常數(shù),Ta為發(fā)電機轉(zhuǎn)動慣量時間常數(shù),Tw為水擊時間常數(shù),eg為發(fā)電機負載自調(diào)節(jié)系數(shù),s為拉普拉斯算子,其他水輪機傳遞函數(shù)因子。
電液隨動系統(tǒng)傳遞函數(shù)[5]為:

水輪機及引水系統(tǒng)函數(shù)[5]為:
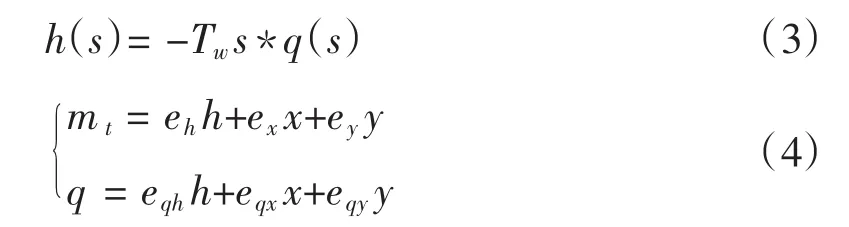
發(fā)電機與及電網(wǎng)傳遞函數(shù)[5]為:

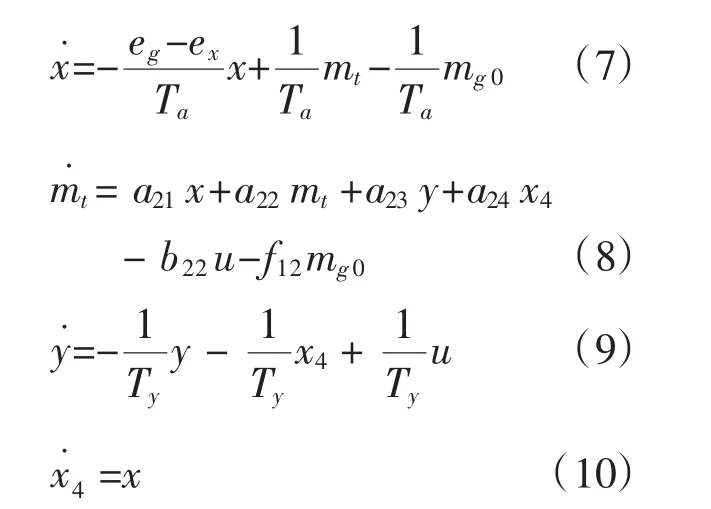
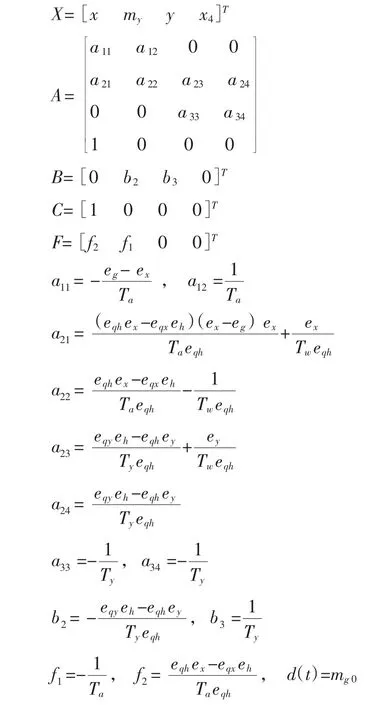
選 x、mt、y 分別為狀態(tài)變量x1、x2、x3,另外增加一個附加變量x4[6],且x4定義如下:

則由以上可知系統(tǒng)狀態(tài)方程為:
寫成矩陣方程

其中
3 滑模控制器設(shè)計
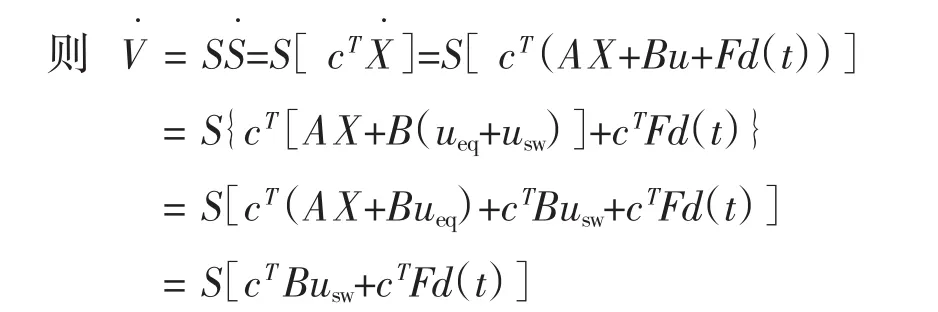
一般而言,滑模控制由兩部分組成:開關(guān)控制和等效控制[7]。其中開關(guān)控制可使系統(tǒng)狀態(tài)量向一個特定面滑動,等效控制則保證系統(tǒng)狀態(tài)量始終在該滑模面上運動,并且最終漸進穩(wěn)定。定義控制量u為:

其中:usw為開關(guān)控制,ueq為等效控制。
首先,定義一個滑模面s,如下式所示:

當(dāng)系統(tǒng)狀態(tài)滑向滑模面時,只有等效控制ueq作用,讓S對時間t的導(dǎo)數(shù)為零,可得:

聯(lián)合式(11)可得:

為了滿足式(13),定義Lyapunov函數(shù)為:

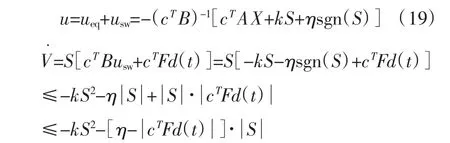
令cTBusw=-kS-ηsgn(S),這里k和η是正常數(shù),sgn(·)是符號函數(shù),則

則控制量u為:
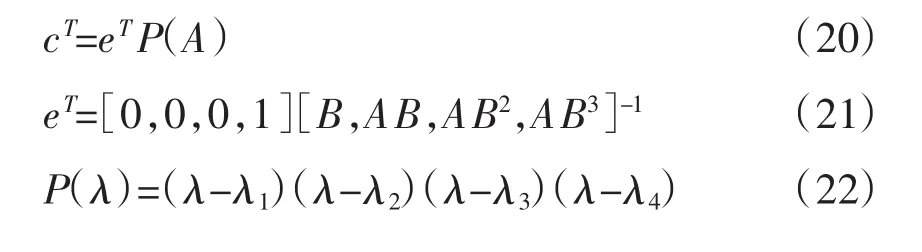
由Ackermann公式[4]可得:由于n=4,則 λ1=-1,λ2=-2,λ3=-3,λ4=-4,從而可計算出cT,滑模控制器設(shè)計完畢。
4 模糊控制接口系統(tǒng)設(shè)計
由文獻[4]可知,模糊滑模控制能夠消除或減弱常規(guī)滑模控制器中因 k固定時引起的“抖振”問題。由滑模存在條件為:設(shè)計如下模糊系統(tǒng):選系統(tǒng)輸入,△k為系統(tǒng)輸出,模糊系統(tǒng)規(guī)則庫定義如下:

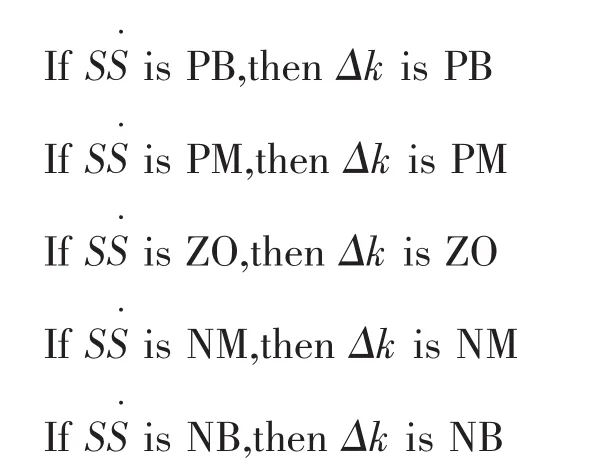
其中:PB、PM、ZO、NM、NB分別表示負大、負中、零、正中、正大。
模糊輸入、輸出隸屬函數(shù)分別如圖2、3所示。
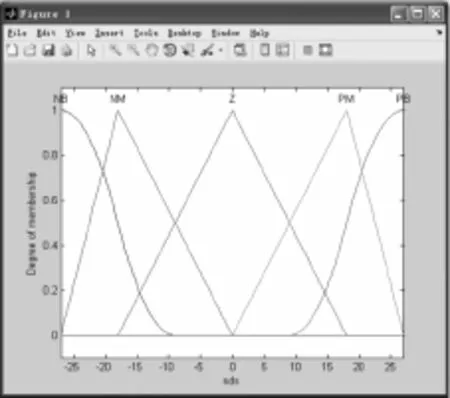
圖2 模糊輸入的隸屬函數(shù)
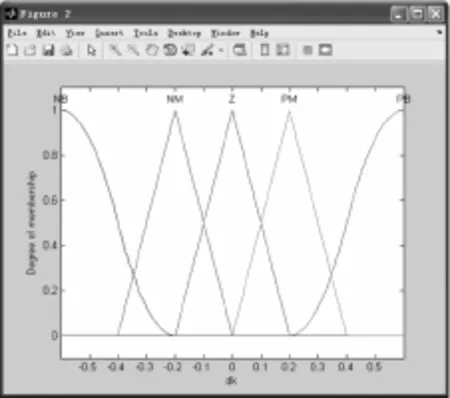
圖3 模糊輸出的隸屬函數(shù)
由模糊控制系統(tǒng)整定后的k定義為:

由于k為正常數(shù),△k的論域為[-0.6 0.6],故k0≥1.2。
5 系統(tǒng)仿真結(jié)果
針對某一水電站的水輪機調(diào)速系統(tǒng)參數(shù)在單機帶負荷的情況下,應(yīng)用Matlab仿真。其參數(shù)如下表1所示。
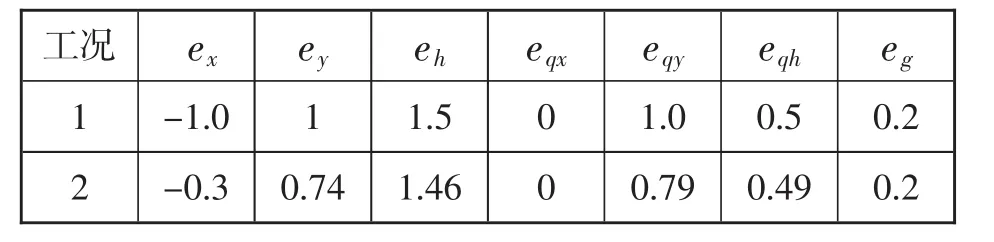
表1 參數(shù)表

為了節(jié)省仿真算法時間,取η=0.2,在負載擾動為10%的情況,工況一時各狀態(tài)變量與控制輸入u的曲線如圖4所示,工況二時各狀態(tài)變量與控制輸入u的曲線如圖5所示。
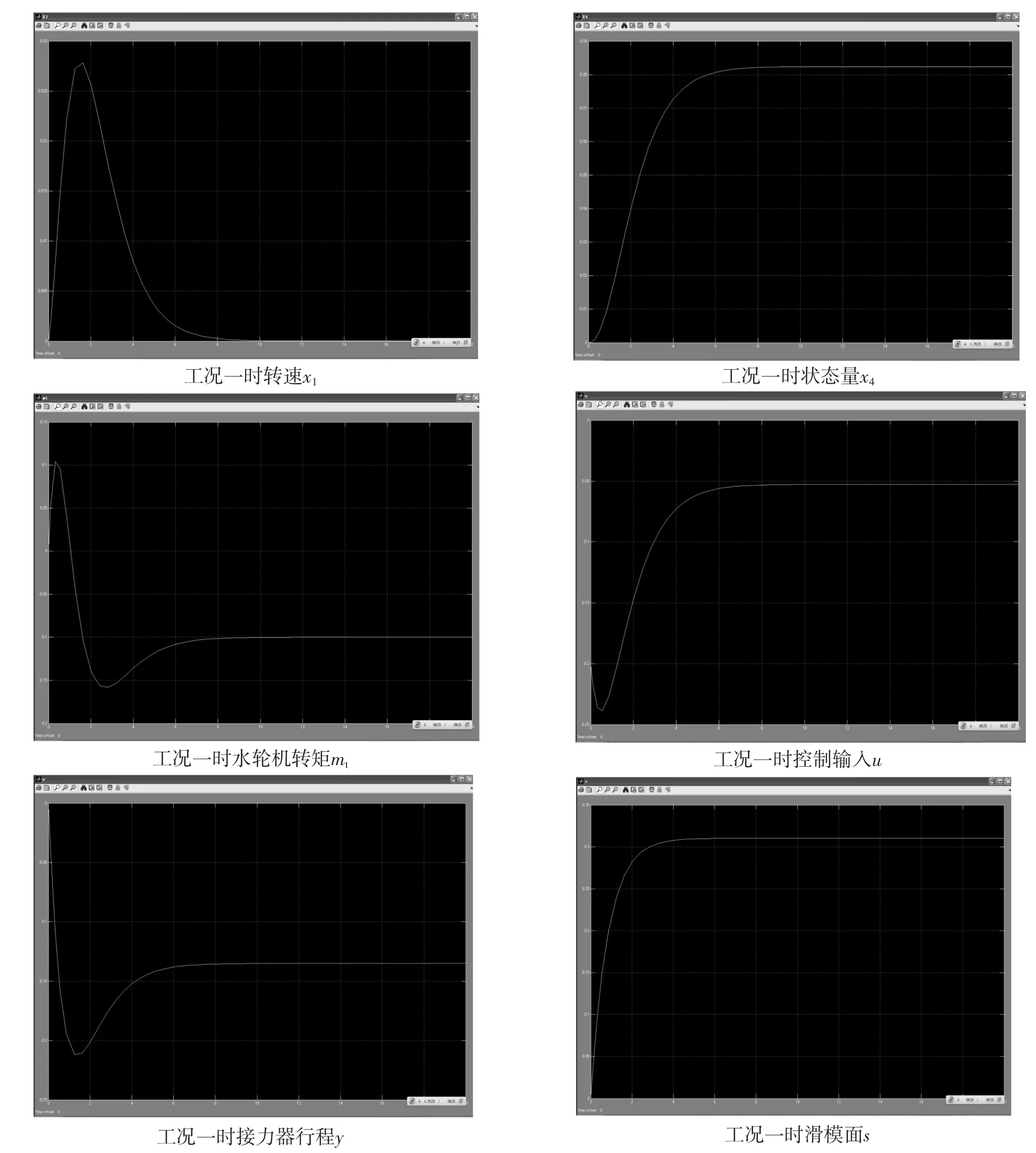
圖4 工況一:負載擾動為10%時曲線
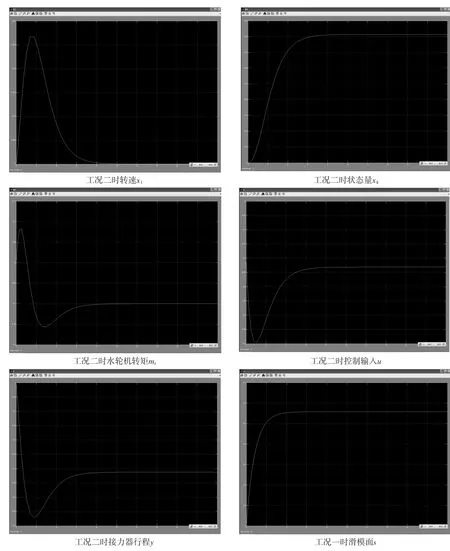
圖5 工況二:負載擾動為10%時曲線
6 結(jié)論
本文提出一種基于滑模控制的水輪機調(diào)速方法,并利用模糊控制系統(tǒng)對滑模控制引起的“抖振”問題進行了探討。通過對某一水電站水輪機在兩種不同工況時的數(shù)據(jù)進行Matlab仿真,結(jié)果表明該方法在水輪機調(diào)速控制方面的可行性,且具有魯棒性。
[1] H Q Fang,L Chen,N Dlakavu,Z Y Shen.Basic Modeling and Simulation Tool for Analysis of Hydraulic Transients in Hydroelectric Power Plants[J] .IEEE Transactions on Energy Conversion,2008,23(3):834-841.
[2] 沈祖詒.水輪機調(diào)節(jié)[M] .北京:中國水利水電出版社,2001.
[3] Jones D,Mansoor S.Predicttive Feedforward Control for a Hydroelectric Plant[J] .IEEE Transactionns on Control Systems Technology,2004,12(6),956-965.
[4] 劉金琨.滑模變結(jié)構(gòu)Matlab仿真[M] .北京:清華大學(xué)出版社,2005.
[5] 魏守平.現(xiàn)代水輪機調(diào)節(jié)技術(shù)[M] .武漢:華中科技大學(xué)出版社,2002.
[6] W Tan,Z Xu.Robust analysis and Design of Load Frequence Controller for Power Systems[J] .Electric Power Systems Research,2009,79(5):846-853.
[7] 姚瓊薈等.變結(jié)構(gòu)控制系統(tǒng)[M] .重慶:重慶大學(xué)出版社,1997.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
山東青年(2016年1期)2016-02-28 14:25:25
電力工程技術(shù)(2014年1期)2014-03-20 14:19:06
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
公務(wù)員文萃(2013年5期)2013-03-11 16:08:37
