基于模糊理論的開(kāi)關(guān)磁阻電機(jī)直接轉(zhuǎn)矩控制
2013-09-20 00:24:38王子煜鄧福軍
大連交通大學(xué)學(xué)報(bào) 2013年2期
關(guān)鍵詞:系統(tǒng)
王子煜,鄧福軍
(大連交通大學(xué) 電氣信息學(xué)院,遼寧 大連 116028)*
0 引言
開(kāi)關(guān)磁阻電機(jī)(SRM)的雙凸極結(jié)構(gòu)和開(kāi)關(guān)式的供電電源模式,是其固有的轉(zhuǎn)矩脈動(dòng)的根源,嚴(yán)重限制了SRM在工業(yè)領(lǐng)域的應(yīng)用范圍[1-3].因此,轉(zhuǎn)矩脈動(dòng)抑制方面的研究是當(dāng)前的熱點(diǎn)[4].眾所周知,DTC的獨(dú)特性在于轉(zhuǎn)矩的直接控制,動(dòng)態(tài)響應(yīng)很快,且已在感應(yīng)電機(jī)控制應(yīng)用中獲得成功.研究表明,將DTC引入到SRD中,回避了復(fù)雜的數(shù)學(xué)模型的同時(shí),在抑制SRM轉(zhuǎn)矩脈動(dòng)方面,效果也比較理想,從而獲得了較好的轉(zhuǎn)矩、轉(zhuǎn)速控制效果[5],大大拓寬了SRM的應(yīng)用市場(chǎng).傳統(tǒng)的DTC技術(shù)采用兩個(gè)滯環(huán)比較器來(lái)分別控制定子磁鏈和電磁轉(zhuǎn)矩,其關(guān)鍵在于怎樣合理的選擇電壓空間矢量來(lái)實(shí)現(xiàn)對(duì)磁鏈以及轉(zhuǎn)矩的控制[6].而通過(guò)滯環(huán)來(lái)控制磁鏈和轉(zhuǎn)矩,很難達(dá)到理想的性能指標(biāo).模糊控制(Fuzzy Control)技術(shù)不要求建立精準(zhǔn)的系統(tǒng)模型,它通過(guò)工程實(shí)踐,逆向總結(jié)出經(jīng)驗(yàn)規(guī)律法則,以此來(lái)控制系統(tǒng),其特性非常適用于SRM的DTC系統(tǒng).本文將模糊控制技術(shù)引入到開(kāi)關(guān)磁阻電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)(SRM_DTC)中,以此改進(jìn)其轉(zhuǎn)矩環(huán)節(jié),從而構(gòu)建出基于模糊邏輯的SRM_DTC系統(tǒng)(SRM_Fuzzy_DTC),并且在MATLAB/SIMULINK軟件環(huán)境中對(duì)之進(jìn)行仿真,其波形可以看出,改進(jìn)后的系統(tǒng)在控制轉(zhuǎn)矩的效果方面明顯得到了改善.
1 SRM_Fuzzy_DTC的結(jié)構(gòu)原理
SRM的瞬時(shí)轉(zhuǎn)矩可用下式來(lái)表達(dá):

由于SRM單極性的供電結(jié)構(gòu),由式(1)可看出,電機(jī)轉(zhuǎn)矩的正負(fù)由的符號(hào)決定.
那么,保持定子電流的幅值不變,當(dāng)定子磁鏈對(duì)電機(jī)轉(zhuǎn)子角度的變化率為正時(shí),將之定義為超前轉(zhuǎn)子位置,此時(shí)磁鏈處于加速狀態(tài),電機(jī)轉(zhuǎn)矩增加;反之,當(dāng)變化率為負(fù)時(shí),定義為滯后電機(jī)轉(zhuǎn)子位置,磁鏈減速,電機(jī)轉(zhuǎn)矩減少.并且,在一個(gè)微小周期內(nèi),控制定子磁鏈加、減速,此時(shí)定子電流會(huì)受到一階延遲的作用,可視其恒定不變.那么,只要改變磁鏈的加、減速狀態(tài),就能達(dá)到控制轉(zhuǎn)矩的目的.于是,在SRM_DTC系統(tǒng)中,可通過(guò)控制磁鏈?zhǔn)噶糠档拇笮『托D(zhuǎn)速度來(lái)調(diào)節(jié)電機(jī)的轉(zhuǎn)矩.
當(dāng)SRM高速運(yùn)行時(shí),定子電阻的壓降影響很小,SRM單相的電壓平衡方程可簡(jiǎn)化為:ΔΨ≈u·Δt,可以看出,定子磁鏈?zhǔn)噶孔兓姆较蚺c所加電壓矢量方向一致.這樣,通過(guò)磁鏈來(lái)控制轉(zhuǎn)矩就轉(zhuǎn)化為選擇合適的電壓空間矢量來(lái)控制轉(zhuǎn)矩.
借鑒永磁同步電機(jī)DTC系統(tǒng)中模糊控制技術(shù)的應(yīng)用[7],在SRM_DTC系統(tǒng)中也將兩者結(jié)合.針對(duì)SRM_DTC系統(tǒng)的自身結(jié)構(gòu),將轉(zhuǎn)矩、磁鏈偏差用量化因子處理,并映射到相應(yīng)的模糊集合中,然后判斷磁鏈角所屬扇區(qū),由此推導(dǎo)出相應(yīng)規(guī)則,然后經(jīng)過(guò)模糊算法,得到期望的電壓矢量,將之解模糊,輸出給逆變器.
SRM_Fuzzy_DTC的系統(tǒng)結(jié)構(gòu)如圖1所示:
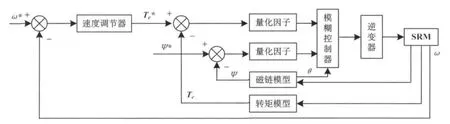
圖1 SRM_Fuzzy_DTC系統(tǒng)原理框圖
從該系統(tǒng)的原理框圖可以看出:
根據(jù)實(shí)際測(cè)得的SRM各相繞組的電壓、電流、轉(zhuǎn)子位置角,通過(guò)建立的磁鏈觀測(cè)模型和轉(zhuǎn)矩觀測(cè)模型分別估算出其瞬時(shí)磁鏈Ψ和瞬時(shí)轉(zhuǎn)矩Te,通過(guò)4/2變換,由α-β坐標(biāo)系中磁鏈的兩個(gè)分量得到定子磁鏈的空間位置角θ.將磁鏈偏差EΨ、轉(zhuǎn)矩偏差ET和磁鏈角θ作為模糊控制器的三個(gè)輸入量,將輸出量解模糊后,控制逆變器的開(kāi)關(guān)狀態(tài),最終控調(diào)節(jié)SRM的轉(zhuǎn)矩.其中速度調(diào)節(jié)器仍采用PID調(diào)節(jié)器,其輸出作為電機(jī)轉(zhuǎn)矩的參考給定[8].
2 模糊控制器的設(shè)計(jì)
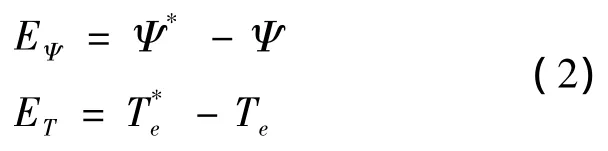
本文中的模糊控制器輸入量為模糊化后的磁鏈偏差EΨ、轉(zhuǎn)矩偏差ET,定子磁鏈角θ,其表達(dá)式如下:
由于定子磁鏈脈動(dòng)較小,且不是主要控制目標(biāo),故其偏差定義的模糊子集個(gè)數(shù)相對(duì)較少,為:{N,Z,P},分別代表模糊集合的語(yǔ)言含義為:{負(fù),零,正};而電機(jī)轉(zhuǎn)矩是主要控制量,關(guān)系到系統(tǒng)性能,且其脈動(dòng)較大,不易限制,故需要在其論域上細(xì)分偏差等級(jí),相應(yīng)的模糊子集為:{NB,NS,Z,PS,PB},分別代表模糊集合的語(yǔ)言含義為:{負(fù)大,負(fù)小,零,正小,正大}.
將定子磁鏈角均分為12段,并根據(jù)SRM與感應(yīng)電機(jī)相數(shù)的不同,對(duì)其隸屬函數(shù)曲線做出調(diào)整.
輸出向量中的每個(gè)元素,分別對(duì)應(yīng)SRM每相的電壓狀態(tài),合成后即為期望的電壓矢量.
輸入變量的各隸屬函數(shù)如圖2所示:
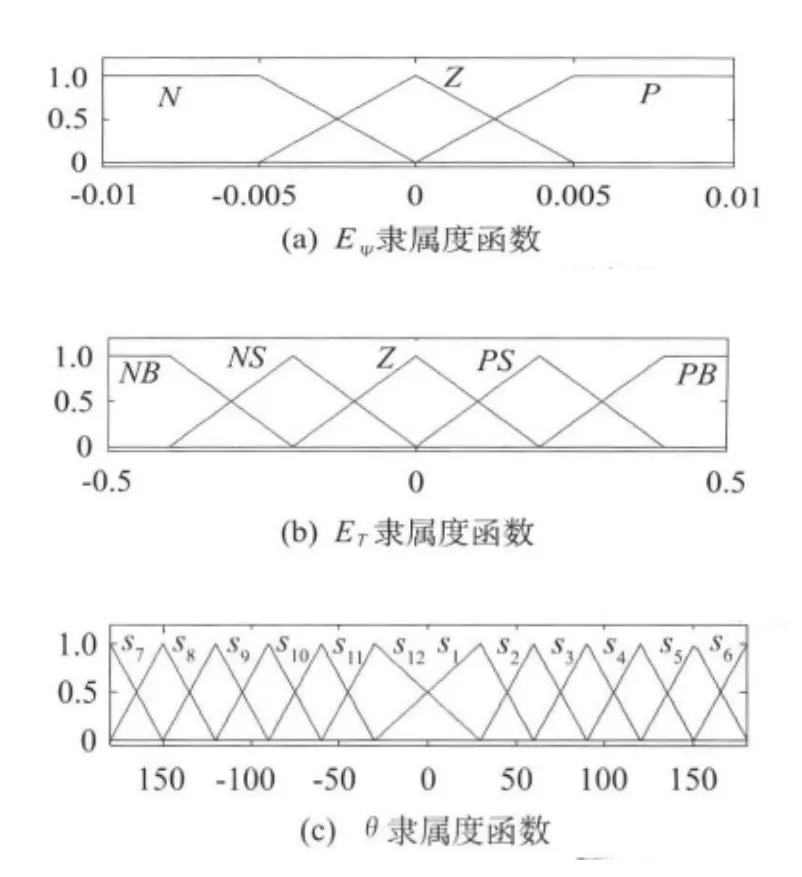
圖2 模糊控制器輸入量的隸屬函數(shù)圖
建立模糊規(guī)則時(shí),根據(jù)輸入偏差的等級(jí)不同,要選擇相應(yīng)的電壓空間矢量,且由于開(kāi)關(guān)表中的電壓矢量數(shù)目有限,對(duì)于磁鏈、轉(zhuǎn)矩偏差而言,很難同時(shí)滿足二者的控制要求.那么,在SRM_DTC系統(tǒng)起動(dòng)初始,磁鏈偏差很大,為了提高最大轉(zhuǎn)矩的建立速度,需優(yōu)先滿足磁鏈的控制要求;當(dāng)磁鏈的幅值達(dá)到給定值后,由于其脈動(dòng)較小,且較易控制,此時(shí)的原則就轉(zhuǎn)為優(yōu)先滿足轉(zhuǎn)矩的控制要求.
在SRM_Fuzzy_DTC系統(tǒng)下,基于模糊理論的DTC規(guī)則如附表所示:
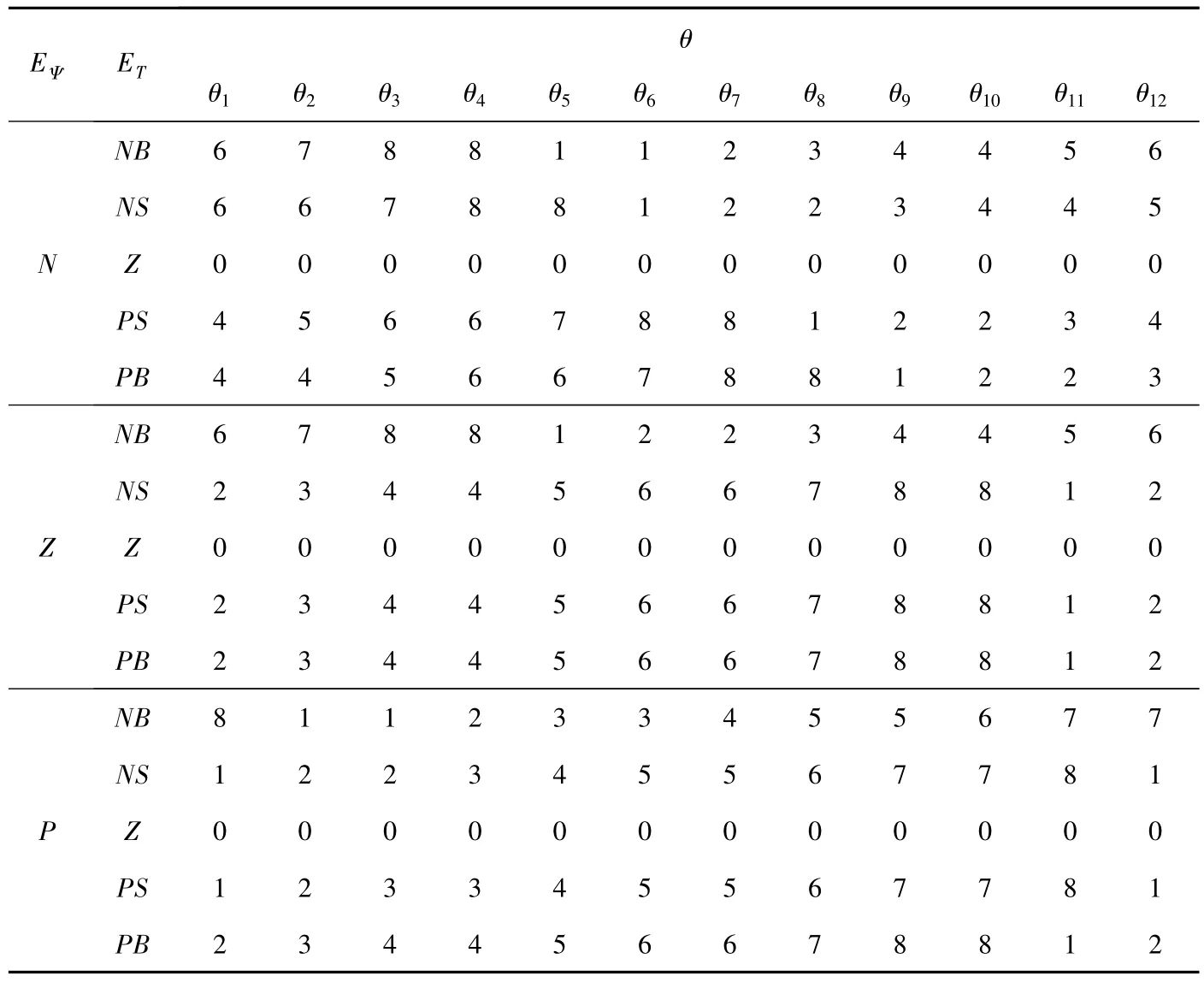
附表 模糊控制規(guī)則表
將模糊規(guī)則用if-then的形式來(lái)表述,則第i條語(yǔ)言為:

其中,Ai、Bi、θi以及 ui分別為磁鏈偏差、轉(zhuǎn)矩偏差、定子磁鏈角以及電壓空間矢量的模糊化后的子集變量.
模糊推理采取常用的Mamdani法,第i條控制規(guī)則的隸屬度ai為:

式中,μAi(εΨ),μBi(eT),μCi(θ)分別為輸入量EΨ,ET,θ的隸屬函數(shù).
再取“交”集,得到輸出量的隸屬函數(shù)μVi(S)為:

式中,μVi(S)為輸出量S的隸屬函數(shù).
所有被激活的模糊規(guī)則均有各自的μVi(S),對(duì)之取“并”集,則合并后的隸屬函數(shù)為μV(S):

式中,S為基本工作電壓矢量.
采用最大值法對(duì)μV(S)處理后,即可得到期望的電壓空間矢量輸出信號(hào).
3 仿真結(jié)果及分析
為驗(yàn)證所設(shè)計(jì)的SRM_Fuzzy_DTC系統(tǒng)的合理性和有效性,采用MATLAB/SIMULINK軟件,利用其自帶的Fuzzy模塊,構(gòu)建模糊控制器[9],其輸出需經(jīng)過(guò)一定處理后才能控制逆變器,本文中采用S函數(shù)的形式構(gòu)建信號(hào)轉(zhuǎn)化模塊[10].對(duì)改進(jìn)后的系統(tǒng)進(jìn)行仿真,并與SRM_DTC系統(tǒng)作對(duì)比分析.
仿真系統(tǒng)的部分參數(shù)設(shè)定如下:
本系統(tǒng)采用四相8/6極SRM,磁鏈給定值Ψ*=0.3 Wb,轉(zhuǎn)速給定值 n*=1 400 r/min,SRM空載起動(dòng),仿真時(shí)間為1 s.
采用傳統(tǒng)DTC算法的SRM_DTC系統(tǒng)仿真結(jié)果如圖3所示.
由圖3可以看出,在按照一定規(guī)則加在定子繞組上的電壓矢量的作用下,定子磁鏈的幅值保持在滯環(huán)容差范圍內(nèi),近似為圓形軌跡,電機(jī)轉(zhuǎn)矩在0.055 s時(shí)達(dá)到給定值,系統(tǒng)達(dá)到穩(wěn)態(tài),此時(shí)轉(zhuǎn)矩在-5~+4 N·m的范圍內(nèi)波動(dòng),系統(tǒng)動(dòng)、靜態(tài)性能較好.
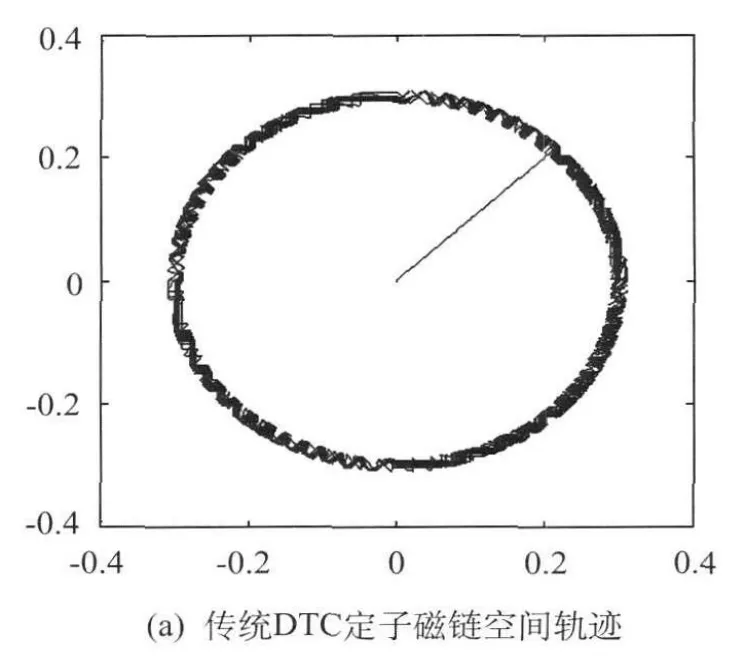

圖3 SRM_DTC系統(tǒng)仿真波形
基于模糊邏輯的改進(jìn)后的SRM_Fuzzy_DTC系統(tǒng)仿真結(jié)果如圖4所示:
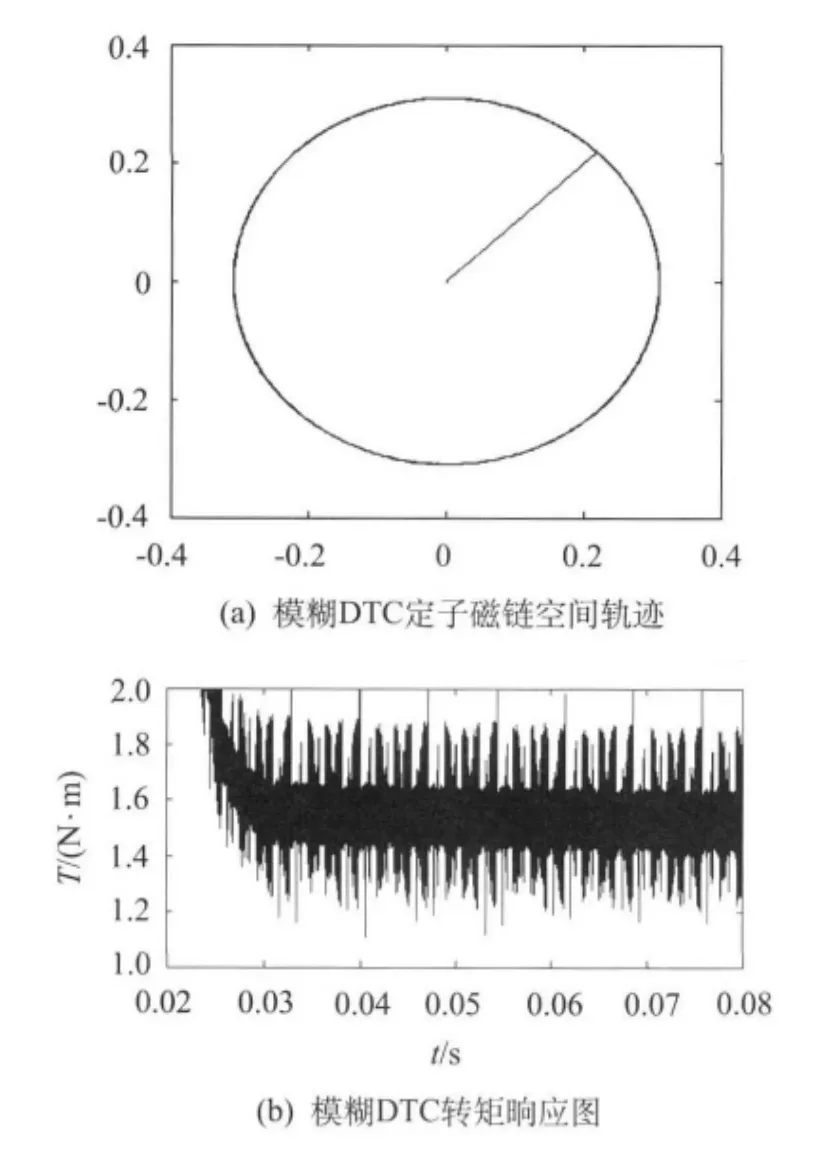
圖4 SRM_Fuzzy_DTC系統(tǒng)仿真波形
由圖4可以看出,改進(jìn)后的SRM_Fuzzy_DTC系統(tǒng),其定子磁鏈軌跡同樣很好的近似達(dá)到圓形,且與SRM_DTC系統(tǒng)相比,其滯環(huán)寬度較小,表明磁鏈幅值的脈動(dòng)較小,對(duì)于磁鏈幅值的控制效果明顯更佳,并且在SRM起動(dòng)時(shí),磁鏈的幅值呈線性增長(zhǎng),很快達(dá)到給定值,加快了電機(jī)最大轉(zhuǎn)矩的建立速度,從而優(yōu)化了系統(tǒng)的動(dòng)態(tài)性能.
而電機(jī)的轉(zhuǎn)矩在0.03 s達(dá)到穩(wěn)態(tài),此時(shí)轉(zhuǎn)矩在+1~+2 N·m的范圍內(nèi)波動(dòng).同SRM_DTC系統(tǒng)相比,SRM_Fuzzy_DTC系統(tǒng)的轉(zhuǎn)矩脈動(dòng)相對(duì)較小,系統(tǒng)的動(dòng)、靜態(tài)性能也有了明顯提升.
4 結(jié)論
本文結(jié)合了Fuzzy Control技術(shù)和DTC技術(shù),提出了新型的直接轉(zhuǎn)矩模糊控制算法,根據(jù)SRM_DTC系統(tǒng)中的磁鏈偏差、轉(zhuǎn)矩偏差和定子磁鏈位置角,通過(guò)模糊規(guī)則,優(yōu)化選擇恰當(dāng)?shù)碾妷嚎臻g矢量,提高了對(duì)電機(jī)磁鏈、轉(zhuǎn)矩的控制效果.與采用傳統(tǒng)DTC算法的SRM_DTC系統(tǒng)相比,采用新算法的SRM_Fuzzy_DTC系統(tǒng)轉(zhuǎn)矩脈動(dòng)較小,而動(dòng)態(tài)響應(yīng)較快,仿真結(jié)果驗(yàn)證了本文提出的新型模糊DTC算法的合理性和有效性.
[1]吳建華.開(kāi)關(guān)磁阻電機(jī)設(shè)計(jì)與應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2000:152-167.
[2]王宏華.開(kāi)關(guān)型磁阻電動(dòng)機(jī)調(diào)速控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,1995:12-20.
[3]KRISHNAN R.Switched Reluctance Motor Drives:Modeling,Simulation,Analysis,Design,and Applications[M].CRC Press,2001:361-375.
[4]王慶龍,汪增福,張興,等.SRM轉(zhuǎn)矩脈動(dòng)抑制的控制策略分析[J].電氣傳動(dòng),2012,42(2):3-6.
[5]NISAI H FUENGWAEODSAKUL,MARCUS MENNE,ROBERT B INDERKA,et al.High-dynamic Four-quadrant Switched Reluctance Drive Based on DITC[J].IEEE Trans.Industry Application,2005,41(5):1232-1242.
[6]周揚(yáng)忠,胡育文.交流電動(dòng)機(jī)直接轉(zhuǎn)矩控制[M].北京:機(jī)械工業(yè)出版社,2009:73-98.
[7]孫丹,賀益康,智大為,等.基于模糊邏輯的永磁同步電動(dòng)機(jī)直接轉(zhuǎn)矩控制[J].電工技術(shù)學(xué)報(bào),2003,18(1):33-38.
[8]張令霞,張興華.直接轉(zhuǎn)矩控制系統(tǒng)的Matlab建模與仿真[J].電氣傳動(dòng),2011,41(1):9-13.
[9]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學(xué)出版社,2008:134-179.
[10]黃志武,劉心昊,年曉紅,等.基于Simulink/S函數(shù)的直接轉(zhuǎn)矩控制系統(tǒng)仿真研究[J].自動(dòng)化技術(shù)與應(yīng)用,2006,25(4):52-56.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
