高精度天線測試系統的研究與設計
2013-09-17 12:30:18張朋祥周鳴籟劉學觀郭輝萍
通信技術 2013年1期
張朋祥, 周鳴籟, 劉學觀, 郭輝萍
(蘇州大學 電子信息學院,江蘇 蘇州 215006)
0 引言
隨著射頻技術的發展,現代通信設備要處理越來越多的信息,天線作為發送信息必需的設備,其性能的好壞直接影響通信過程,基站天線新舊影響能量消耗。在研究天線的傳播特性及天線發射信號方向性的過程中,用解析分析和數值算法只能給出理論參考模型,并不能精確分析天線結構及制造過程和環境對它們的影響,必須通過實驗的方法進行檢驗和修正理論模型。很多新型的天線,其方向性、增益等參數都有了很大提高,對天線測試系統提出了非常高的要求,鑒于此,提出一種新型的基于計算機和高精度設備的高精度天線測試系統[1-5]。
1 系統的軟硬件介紹
此天線測試系統可以測量天線的相位方向圖和幅度方向圖,由硬件和軟件兩部分組成,接下來將對軟硬件展開說明。
1.1 高精度天線測試硬件
典型的天線測試系統硬件組成必須包括以下部分:發射天線支架(源塔)、源塔控制器、源塔指示器、發射信號源控制器、受試天線定位器(天線轉臺)、定位器控制、定位器指示器、接收機、天線方向圖記錄儀等[6-7]。上述硬件系統包含組成部分較多,多部件組合要考慮系統兼容性等參數,容易導致測試精度不高。因此新型的天線測試系統必須簡化結構,運用精度高,集成度高的硬件。本文描述的高精度天線測試系統主要由控制部分、天線轉臺和矢量網絡分析儀組成,這三個部分就完成前面大量設備完成的功能。
控制部分主要由個人計算機(PC,Personal Computer)軟件和相對應的硬件組成,可高精度地控制定位器(轉臺)運動和信號源信號的發射。PC機軟件通過與安裝在外設組件互連(PCI,Peripheral Component Interconnect)總線上的步進電機控制卡通信來控制三個接收轉臺上電機驅動器和一個發送轉臺上的電機驅動器,進而控制天線轉臺。用局域網(LAN,Local Area Network)接口連接PC與矢量網分儀,從 PC機向網分儀發送控制指令,并把網分儀測得的數據返回到 PC機上。硬件組成框圖如圖1所示。
天線轉臺可以實現方位角與俯仰角的轉動,且轉動精度較高,最小步進角度為0.0003度,相對普通天線轉臺步進角度0.05或0.1度有較大的提高。另外,此轉臺有平動機構和豎直抱桿,可以進行直線運動,用來糾正轉臺安裝誤差及進行水平方向的天線測試;也可以上下移動天線,使收發天線嚴格對準,進而提高測量精度。
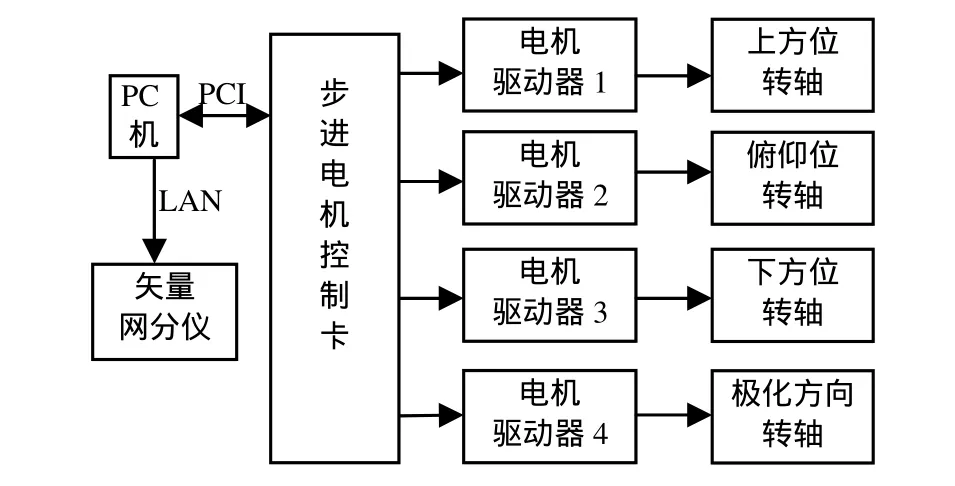
圖1 硬件組成框圖
矢量網分儀選用羅德與施瓦茨公司型號為ZVL13的矢網,其測量頻率范圍9 kHz~13.6 GHz,可測頻率范圍寬,有兩個端口,可供接收與發送兩個天線連接。另外,測量參數多樣精度高。把網分儀作為接收機、發射機與信源控制的集合體,簡化了測試系統結構,并且提高了測試精度與可靠性。
1.2 高精度天線測試軟件
天線測試軟件是天線測試系統最重要的組成部分之一,它給使用者提供了控制整個天線測試系統的界面,并顯示天線方向圖,完成天線參數的測試。另外,此軟件還支持天線性能參數保存。總體來說天線測試軟件主要包括三個部分:網分儀控制程序,天線轉臺控制程序及測試軟件界面。
網分儀控制程序即控制網分儀的控儀器標準命令(SCPI,Standard Commands for Programmable Instruments)指令,包括設置待測的頻率范圍、頻點數、待測參數類型等,它通過虛擬儀器軟件架構(VISA,Virtual Instrument Software Architecture)被傳送到網分儀。網分儀返回的數據也是通過VISA傳輸到測試軟件,然后利用德州儀器公司的畫函數曲線控件把數據轉換成函數曲線顯示在測試軟件界面上。
天線轉臺控制程序即步進電機控制卡程序,它提供設置轉動角度范圍、轉動初速度、加速度、最終速度和實時查詢天線轉臺位置信息及速度的函數。當調用此函數時,控制卡向電機驅動器發出相應指令,使電機運轉。
天線測試軟件最重要的部分是測試軟件界面,下面對其作具體描述:
(1)參數設置界面
此界面可設置待測的頻率范圍,一般應設置在天線的工作頻段內。為保證天線測試的精確性和數據的高精度,還應把天線測試參數取平均,平均次數可自行選擇。
為明確顯示天線工作頻段內某些頻率點的值,可根據需要設置測量頻點數。此外,需測天線幅度或相位及單位符號、發射與接收天線所連接的網分儀端口、天線轉臺轉動的角度范圍、轉動速度,都可在此界面上設置。
(2)顯示設置界面
利用此界面可找出天線最重要的工作頻點,并把相應頻點上的相位或幅度信息顯示在測量界面中。圖片的顯示背景與函數曲線顏色和類型也要在此設置。右上角的圖片為顯示樣例。
(3)測量界面
此界面主要功能是把角域和頻域數據以函數曲線的形式顯示出來,把轉臺的俯仰與方位信息以數字的形式顯示。
(4)數據保存
用函數曲線顯示的只是相應頻率范圍的幾個測量點,并沒有顯示頻段內所有的測量頻點。可通過數據保存界面把所有的測量頻點以文本文檔的格式保存下來。同時可以選擇保存角域或頻域數據以及文件保存的路徑。
(5)轉臺控制
轉臺控制界面如圖2所示。天線測試初始階段的天線對準操作要控制轉臺運動才能完成,而天線嚴格對準是高精度測試天線性能的基礎。此界面可直接顯示俯仰角與方位角,并可以單純設置轉臺轉動的角度及速度而不涉及天線性能測試操作,另外各個轉軸可以單獨控制也可以進行多軸插補控制。
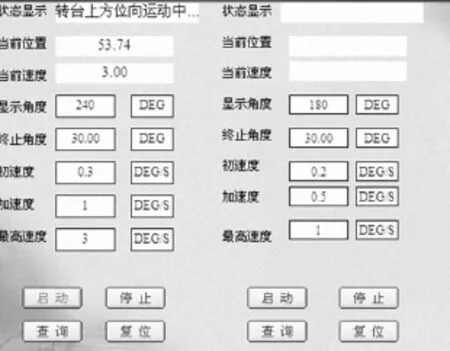
圖2 轉臺控制界面
天線控制軟件主要由以上幾個部分組成,通過這幾個界面的配合,就可以高精度的測試天線性能參數,如天線幅度方向圖和相位方向圖。既可以以曲線的形式顯示,也可以文本文檔的形式顯示。圖3所示為測試得到的函數曲線。縱坐標為測得的S21參數,可根據此參數算出天線在各個方位角的具體增益值,橫坐標為方位角θ。
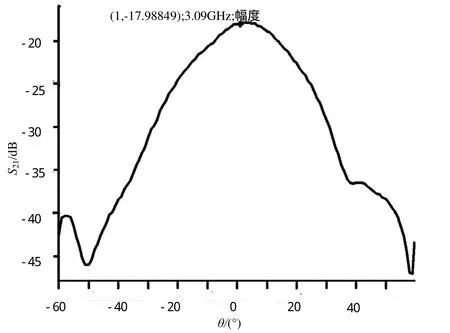
圖3 接收天線收到信號的幅度方向圖
2 標定天線相位中心
天線相位中心對于精確定位和測量的重要性越來越突出,其標定成為研究的重點。本文中提出的天線測試系統含有一維平動機構和方位轉臺,再利用此系統測出的天線的相位方向圖數據即可進行此天線相位中心的標定。而且此系統用一維平動機構標定相位中心,比傳統的用二維轉臺標定相位中心降低了很多成本。一維平動機構一般花費 1000~2000元,而二維平動機構由于技術要求高,兩個平動機構要嚴格垂直,費用在一萬元以上。以上數據差別非常明顯,用一維平動機構可以明顯降低預算。
天線相位中心的標定采用文獻[8]中闡述的方法,步驟如下:首先測試天線相位方向圖,然后利用方向圖的數據和收發天線之間的距離計算出天線相位中心相對于現在轉動中心極坐標位置,即找出ρ,θ的值,以這兩個值為標準移動平動機構和方位轉臺,使轉動中心和天線相位中心重合。繼續重復上面的步驟,直至ρ,θ達到理想的值。圖4為第一測量得到的天線相位方向圖,橫坐標為方位角 θ,縱坐標為相位φ。利用此方向圖的數據,計算ρ,θ的值,并把轉臺作相應的移動,重新測量天線相位方向圖,如圖5所示。

圖4 第一次測量得到的相位方向圖
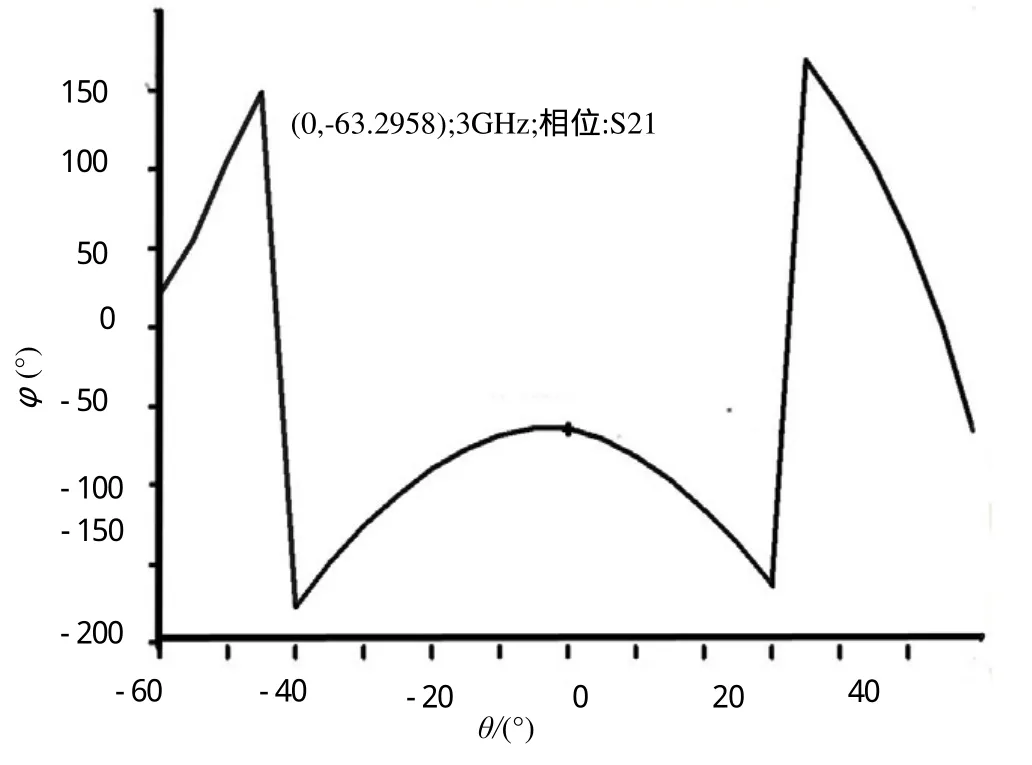
圖5 第二次測量得到的相位方向圖
從上圖兩個函數曲線可知,方位角-40°~+40°的角度范圍內,相位方向圖的上凸的程度已經變小,天線現在位置正在向天線相位中心逼近。多次重復進行此操作之后,即可完成天線相位中心的標定。
3 結語
天線測試系統作用主要是測試天線的性能參數,從而驗證其是否滿足要求,同時為天線的改進提供指導性意見。而高精度的測試系統更能真實的反應天線特性,較快發現其缺陷。本文提出的測試系統已在實驗室的天線測試中得到了應用,測試新制作出的天線的方向圖,找出不滿足要求的地方,再進行有針對性的修改,最終使天線滿足要求。前段時間有一家通訊公司用此測試系統測試新研發的天線,并利用測得的參數進行調試,最后把天線調試成功。此外,該測試系統還可進行天線相位中心的標定。綜上所述,本文提出的高精度天線測試系統有廣闊的應用前景。
[1] 劉昕,張華強,趙剡,等.應用于天線控制的組合導航系統設計[J].通信技術,2012,45(01):19-21.
[2] 何壽福.無線通信技術在測繪工程中的應用研究[J].通信技術,2012,45(07):94-96.
[3] 鄧超,孫莉.基于反射系數的短波天饋線檢測研究[J].通信技術,2012,45(08):41-43.
[4] 何力,余海,房利國.基于物聯網的能耗檢測系統解決方案[J].信息安全與通信保密,2012(01):67-71.
[5] 李福劍,李彥文.天線測試中的誤差分析[J].船舶電子對抗,2007,30(01):115-118.
[6] 齊巖,湯斌,胡國良,等.天線測試平臺系統設計與安裝[J].計測技術,2009,29(02):33-35.
[7] Doug Moore.天線測試[J].現代電信技術,1999,4(04):24-27.
[8] 柯炳清,丁克乾.天線相位中心的推算及標定[J].遙測遙控,2009,30(06):66-69
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
當代陜西(2020年13期)2020-08-24 08:22:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
制造技術與機床(2017年5期)2018-01-19 02:49:17
濰坊學院學報(2016年2期)2016-12-01 13:00:11
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21