基于幾何成像模型的魚眼鏡頭圖像校正算法和技術(shù)研究
2013-09-13 06:05:54費(fèi)章君楊仕友
機(jī)電工程 2013年10期
關(guān)鍵詞:模型
李 根,費(fèi)章君,楊仕友*
(1.浙江大學(xué) 電氣工程學(xué)院,浙江 杭州 310007;2.南自信息技術(shù)有限公司,江蘇 南京 210012)
0 引 言
由于魚眼鏡頭具有視場(chǎng)角廣(可達(dá)180 °)的優(yōu)點(diǎn),特別適合于大場(chǎng)景視頻監(jiān)控應(yīng)用,近年來(lái)在視頻監(jiān)控領(lǐng)域的應(yīng)用日漸廣泛。由于魚眼鏡頭拍攝圖像帶有大量的桶形徑向畸變[1],故魚眼圖像不符合人類視覺(jué)習(xí)慣。為解決這個(gè)問(wèn)題,國(guó)內(nèi)外學(xué)者提出了多種方法以校正魚眼鏡頭圖像。應(yīng)用最早的方法為基于多項(xiàng)式模型的校正算法[2-3],Basu 等[4]提出了基于對(duì)數(shù)運(yùn)算的FET 變換方法(Fish-Eye Transform),以及基于拋物面成像模型的漫游及深度恢復(fù)算法[5-6],Kedzierski 等人[7]提出了一種基于微分幾何的精確校正算法,Wang 等人[8]提出了基于參數(shù)方程的魚眼鏡頭畸變數(shù)學(xué)模型,并將主光軸偏轉(zhuǎn)也包含在內(nèi)。需要說(shuō)明的是,這些現(xiàn)有算法不是從魚眼鏡頭的構(gòu)造出發(fā),或者沒(méi)有區(qū)分不同類型的魚眼鏡頭,因此無(wú)法針對(duì)不同的鏡頭類型的圖像給出校正參數(shù)的解析解。
有鑒于此,本研究基于“非相似”成像理論,類比小孔成像模型構(gòu)造不同魚眼鏡頭的幾何模型,提出一種魚眼鏡頭圖像校正算法;同時(shí),為保證算法的實(shí)時(shí)性,還對(duì)算法的快速實(shí)現(xiàn)問(wèn)題進(jìn)行研究。
1 非相似成像理論
魚眼鏡頭是人們模仿魚眼工作原理而設(shè)計(jì)的鏡頭。其特點(diǎn)是視場(chǎng)角廣,可以達(dá)到180 °范圍,但所獲得的圖像具有徑向桶形畸變的特征。魚眼鏡頭攝像機(jī)在水平視場(chǎng)角180 °、垂直視場(chǎng)角160 °拍攝的圖像如圖1 所示。

圖1 魚眼鏡頭拍攝的圖像
根據(jù)相似成像原理,普通光學(xué)鏡頭遠(yuǎn)距成像像高公式為:

式中:y0′—理想像高度,f—鏡頭物方焦距,ω—物方半視場(chǎng)角。
魚眼鏡頭遠(yuǎn)距成像模型為非相似成像模型,針對(duì)不同鏡頭,有以下成像公式[9-10]:

式(2~5)都可提供相應(yīng)的徑向桶形畸變,但是特點(diǎn)各不相同。其中式(3)稱為“等距投影”成像,是應(yīng)用最為廣泛的魚眼鏡頭成像模式。
2 等距投影成像幾何模型
筆者以式(3)和式(5)為例,研究魚眼鏡頭的幾何模型。上述式(1)的幾何模型為“小孔成像”模型,如圖2 所示。

圖2 小孔成像模型
根據(jù)圖2,如果把像平面π替換為原點(diǎn)為O、半徑為 f 的半球面π2,則像高y′0 滿足式(5)。由此推廣,通過(guò)替換不同的曲面作為像面,可以做出不同魚眼鏡頭的幾何模型,幾何模型如圖3 所示。

圖3 魚眼鏡頭成像幾何模型
圖3 中,曲面 π2 為球面,曲面π1 即滿足式(3)的“等距成像”的像曲面。由式(3)以及魚眼鏡頭的對(duì)稱性,可知π1的解析式為:

3 魚眼鏡頭圖像的校正算法
平面校正,就是去掉魚眼鏡頭圖像的畸變,使輸出圖像符合人類視覺(jué)習(xí)慣的操作。具體來(lái)說(shuō),沒(méi)有畸變的圖像是由小孔成像原理得出的,也就是在平面π上的成像。因此,如果能根據(jù)曲面π1上的像計(jì)算出π 上的像,即可得到校正圖像。圖3 中的物點(diǎn)p 在平面π 和曲面π1上分別形成像點(diǎn)q 和q1,像高分別為和。由式(1)和式(3)可得:
通過(guò)左右移動(dòng)平面π,也就是改變小孔成像的焦距,就可以改變校正后圖像的視場(chǎng)角,實(shí)現(xiàn)“拉近推遠(yuǎn)”(zoom)的效果。設(shè)校正后圖像的成像焦距為 f′,原圖像焦距為 f,則有:

式(7)即為由幾何模型得到的等距影魚眼鏡頭圖像平面校正公式。
同理可得對(duì)于式(2,4,5)的魚眼鏡頭模型,其平面校正公式分別為:

4 實(shí)時(shí)實(shí)現(xiàn)技術(shù)
計(jì)算機(jī)內(nèi)部以像素為單位存儲(chǔ)圖像,所以必須將式(7)轉(zhuǎn)化為以像素為單位的圖像。為此,首先需要確定原圖像的光學(xué)中心,即主光軸通過(guò)的位置。由圖3 知,水平和豎直視場(chǎng)角都為180 °的魚眼鏡頭拍攝的圖像為圓形,其圓心就是光學(xué)中心,圖像的其他部分為空白(實(shí)際為黑色)。如果圖像的光學(xué)中心固定,可以事先獲取一幅圖像,魚眼鏡頭圖像如圖4 所示,本研究先使用形態(tài)學(xué)方法找到圖像的圓形邊緣,再使用Hough 變換計(jì)算圓心坐標(biāo),應(yīng)用于后續(xù)圖像。光學(xué)中心示意圖如圖5 所示。

圖4 魚眼鏡頭圖像

圖5 光學(xué)中心示意圖
為實(shí)現(xiàn)實(shí)時(shí)確定上述圓心(光學(xué)中心),本研究提出了一種快速計(jì)算方法。
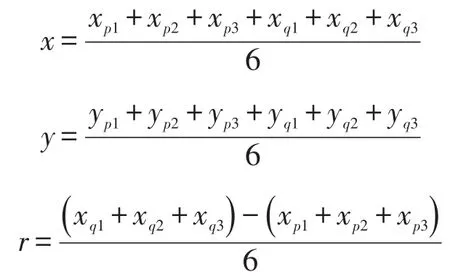
通過(guò)觀察圖4 可知,圓上最靠近圖像左邊緣的點(diǎn)和最靠近右邊緣的點(diǎn)連接起來(lái)就是一條直徑,而直徑的中點(diǎn)就是圓心。所以本研究可以通過(guò)掃描圖像找到這兩個(gè)距邊緣最近的灰度不為零的像素 p 和q,從而快速求取圓心坐標(biāo)。實(shí)際圖像中由于采樣間隔,可能找不到相應(yīng)的像素,同時(shí)由于邊緣找取的結(jié)果可能不光滑,從而影響算法的精確度。此時(shí)研究者可將與左、右邊緣距離最小的各3 個(gè)像素縱坐標(biāo)分別取平均值,橫坐標(biāo)不變,構(gòu)造出p 和q 的坐標(biāo)。具體實(shí)現(xiàn)時(shí),圖像數(shù)據(jù)存儲(chǔ)為二維數(shù)組,像素坐標(biāo)即數(shù)組下標(biāo)。如果從第一行開始掃描,將當(dāng)前距左、右邊緣距離最小的3 個(gè)像素坐標(biāo)分別緩存在數(shù)組中,如果遇到距離更小的點(diǎn)就替換緩存中的數(shù)據(jù)。最終找到距左邊緣距離最小的3 個(gè)點(diǎn) p1、p2、p3,距右邊緣距離最小的3 個(gè)點(diǎn)q1、q2、q3,則可得出圓心坐標(biāo)(x,y)和半徑r 分別為:
另外,根據(jù)式(3)可知,攝像機(jī)焦距為:

式中:r—圓的半徑;f—焦距,單位為像素。
設(shè)校正后的圖像高為h,寬為w,其上有一點(diǎn)A(x,y),對(duì)應(yīng)原圖像像點(diǎn) A′(x′,y′)。假設(shè)校正后圖像的光學(xué)中心位于幾何中心,重合于O(w/2,h/2),則A′點(diǎn)像高和坐標(biāo)為:
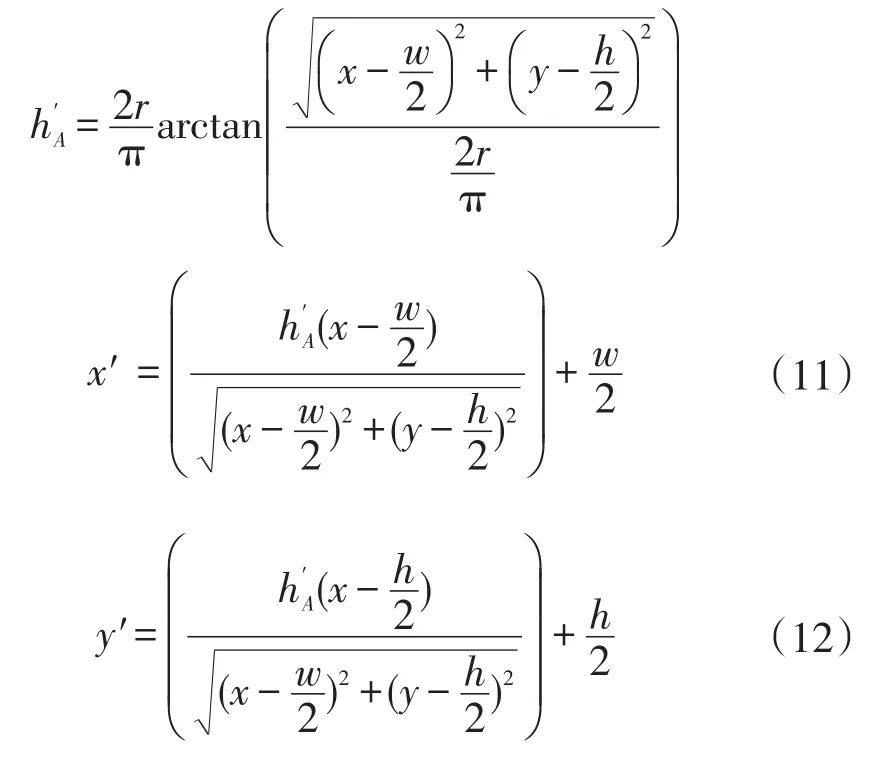
由式(11,12)可得校正后圖像的任意像點(diǎn)對(duì)應(yīng)原圖像的像點(diǎn)位置,一般不為整數(shù),筆者使用插值方法計(jì)算出像素顏色值。遍歷所有像素點(diǎn)得到的校正后的圖像如圖6 所示。

圖6 校正后圖像
在實(shí)際應(yīng)用中,式(11,12)涉及到多次根號(hào)和三角函數(shù)運(yùn)算,研究者可以采用映射表的方法提高算法效率。另外,具體實(shí)現(xiàn)中研究者可以根據(jù)需要,在滿足精度要求的前提下,選擇快速的插值算法以提高效率。
5 實(shí)時(shí)性優(yōu)化
由于式(11,12)包含多次平方根和三角函數(shù)運(yùn)算,如果逐點(diǎn)運(yùn)算,復(fù)雜度太高,實(shí)際應(yīng)用中可能達(dá)不到實(shí)時(shí)性要求。為了提高效率,研究者可以在參數(shù)確定的前提下提前算出所有結(jié)果,將其緩存為文件,程序啟動(dòng)時(shí)將數(shù)據(jù)讀入內(nèi)存。
由于式(11,12)的計(jì)算結(jié)果不為整數(shù)。為了減少計(jì)算量,可以直接緩存插值所需的參數(shù)。以雙線性差值為例,某一點(diǎn)p(x,y)的灰度值 f(x,y)計(jì)算公式為:

式中:Qij—p 左上、右上、左下、右下的4 個(gè)相鄰點(diǎn),kij—雙線性插值參數(shù)。
如果攝像機(jī)的參數(shù)不變,那么Qij和kij 都不變,可以將它們緩存起來(lái)使用。數(shù)據(jù)結(jié)構(gòu)可如下設(shè)計(jì):
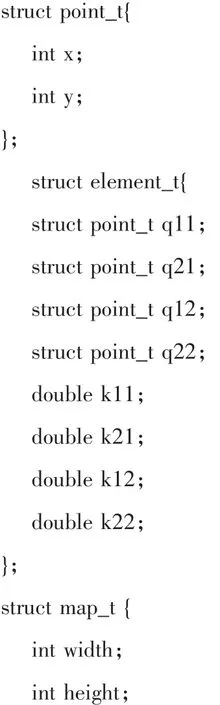
這樣的數(shù)據(jù)結(jié)構(gòu)可以方便地存入磁盤或從磁盤中讀取。
采用緩存之后,由于系數(shù)kij不為整數(shù),依然無(wú)法避免浮點(diǎn)數(shù)計(jì)算。在滿足精度要求的前提下,可以使用整形變量近似浮點(diǎn)數(shù)變量。當(dāng)浮點(diǎn)數(shù)賦值給整形變量時(shí),小數(shù)部分將被忽略,無(wú)法保證精度,所以需要額外的處理。
觀察式(13),如果將kij乘以一個(gè)相同的系數(shù),等式左邊只要乘以同一個(gè)系數(shù)等式依然成立。所以可以使用“將kij乘以一個(gè)系數(shù)m”的方法,將kij 的小數(shù)部分中的一部分,移至整數(shù)部分。這樣將kij賦值給整形變量時(shí),忽略的小數(shù)部分就可以按照研究者的要求增大或減小,改變m 的值就可以改變精度。計(jì)算出結(jié)果后,只要將 f(x,y)除以m,即可得到實(shí)際的結(jié)果。因?yàn)橛?jì)算機(jī)中的移位操作比除法效率高,筆者建議m 的取值為2 的冪級(jí)數(shù)的形式,這樣便可以用移位操作代替除法操作。
為說(shuō)明本研究?jī)?yōu)化算法的計(jì)算效率,現(xiàn)以典型圖像處理為例,計(jì)算考察了不同算法的實(shí)時(shí)處理能力。兩種不同方法的性能比較結(jié)果如表1 所示。顯然,本研究算法的計(jì)算效率明顯高于原算法的計(jì)算效率。
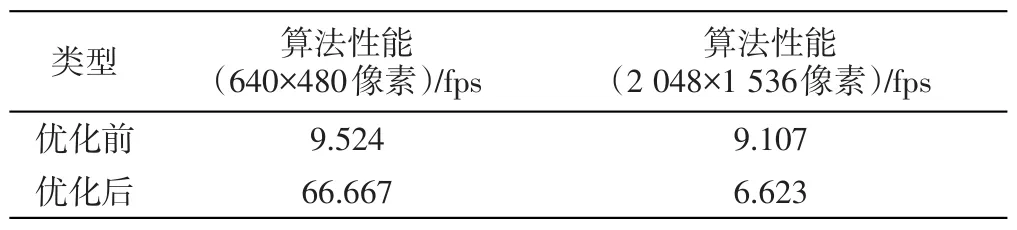
表1 不同算法性能對(duì)比
6 結(jié)束語(yǔ)
本研究基于幾何成像模型研究了魚眼鏡頭圖像的校正算法和技術(shù)。這種方法基于鏡頭成像原理,可對(duì)不同鏡頭的圖像進(jìn)行精確校正,并可通過(guò)參數(shù)調(diào)節(jié)實(shí)現(xiàn)校正后圖像的視場(chǎng)角變化。本研究以“等距投影”模型為例,給出了其實(shí)現(xiàn)方法。最后,為解決算法工程應(yīng)用的實(shí)時(shí)性,本研究提出了基于緩存的優(yōu)化的快速計(jì)算方法和快速雙線性插值實(shí)現(xiàn)方法。經(jīng)過(guò)實(shí)驗(yàn)驗(yàn)證,根據(jù)上述方法開發(fā)的圖像校正系統(tǒng)可以實(shí)現(xiàn)魚眼圖像實(shí)時(shí)精確校正。
因?yàn)轸~眼鏡頭圖像畸變?yōu)榉蔷€性畸變,離光學(xué)中心越遠(yuǎn)的點(diǎn)畸變?cè)酱螅U蟮膱D像較邊緣的區(qū)域存在模糊和鋸齒現(xiàn)象。如何減少鋸齒和模糊現(xiàn)象,將是下一步研究工作的重點(diǎn)。
(References):
[1]KANNALA J,BRANDT S S.A generic camera model and calibration method for conventional,wide-angle,and fisheye Lenses[J].IEEE Transactions Pattern Analysis and M achine Intelligence,2006,28(8):1335-1340.
[2]NOMURA Y,SAGARA M,NARUSE H,etal.Simple cali?bration algorithm for high-distortion lens camera[J].IEEE Transactions on Pattern Analysis and M achine Intelli?gence,1992,14(11):1095-1099.
[3]廖士中,高培煥,蘇 藝,等.一種光學(xué)鏡頭攝像機(jī)圖象幾何畸變的修正方法[J].中國(guó)圖象圖形學(xué)報(bào),2000,5A(7):593-596.
[4]BASU A.Alternative models for fish-eye lenses[J].Pat?tern Recognition Letters,1995,16(4):433-441.
[5]汪嘉業(yè),楊興強(qiáng),張彩明.基于魚眼鏡頭拍攝的圖像生成漫游模型[J].系統(tǒng)仿真學(xué)報(bào),2001(13):66-68.
[6]張 誠(chéng),汪嘉業(yè).利用魚眼照片恢復(fù)景物的深度信息[J].工程圖學(xué)學(xué)報(bào),2002(3):71-84.
[7]KEDZIERSKI M,F(xiàn)RYSKOWSKA A.Precise method of fisheye lens calibration[C]//The International Archives of the Photogrammetry,Remote Sensing and Spatial Informa?tion Sciences.China:[s.n.],2008:765-768.
[8]WANG J,SHIF,ZHANG J,etal.A new calibration model of camera lens distortion[J].Pattern Recognition,2008,41(2):607-615.
[9]陳晃明,陳向穎.魚眼鏡頭光學(xué)設(shè)計(jì)[J].北京理工大學(xué)學(xué)報(bào),1989,9(12):35-42.
[10]王永仲,魚眼鏡頭光學(xué)[M].北京:科學(xué)出版社,2006.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
- 機(jī)電工程的其它文章
- 基于ARM Cortex 系的視覺(jué)導(dǎo)航AGV雙核控制器設(shè)計(jì)
- 基于以太網(wǎng)和RS485 的服裝吊掛生產(chǎn)線控制系統(tǒng)*
- 燃?xì)廨啓C(jī)動(dòng)態(tài)仿真容積效應(yīng)法研究
- 基于遺傳神經(jīng)網(wǎng)絡(luò)的電動(dòng)汽車鋰電池SOC 預(yù)測(cè)*
- 低壓無(wú)功補(bǔ)償模塊及其聯(lián)網(wǎng)擴(kuò)容系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)*
- 基于單片機(jī)的立體藥庫(kù)控制方法設(shè)計(jì)