基于調頻連續波雷達的動態背景建立方法
2013-09-12 07:50:12成海朋
兵器裝備工程學報 2013年9期
吳 洋,成海朋,王 誠
(中國航天空氣動力技術研究院,北京 100074)
民用安防雷達布防系統適用于復雜環境及背景起伏情況下動目標識別跟蹤的情況。與傳統的脈沖雷達相比,調頻連續波(frequency modulation continuous wave,FMCW)雷達具有低發射功率、低截獲性、小型固態化、高距離分辨力、大時間帶寬積、高靈敏度以及高抗有源干擾能力等優點,在工程上得到廣泛的應用。FMCW雷達測距的實質就是對差拍信號的頻率進行估計,即FMCW信號處理的基本任務就是估計出差拍信號的頻率,然后利用差頻和距離之間的線性關系達到測距目的,而選擇三角波作為調制信號,通過三角波上升段和下降段的頻率可以得到目標的速度信息。
隨著技術進步和器件成本逐漸降低,FMCW雷達逐步應用到民用領域,監獄安防監視、機場無人區監視、工廠倉庫監視等都可以通過FMCW信號雷達實現,并通過測距功能進行防區范圍設置。民用領域中監視場所多不是靜空區域,監視區內可能包含墻壁、電纜、鋼網等固定物體,形成復雜待檢測區域,現有的解決方案是通過開機時段的環境學習進行背景建立,通過實時的環境情況反饋與已建立的背景進行比對來確定是否存在目標,這種方法沒有切實考慮到發射和接收功率的波動以及背景的起伏,實踐表明建立固定的背景環境無法真實反映目標運動情況,且由于背景起伏而造成虛警率較高。針對上述強雜波的復雜環境,提出了通過動態背景作為參考來識別動目標的方案,有效的解決了這一問題。具有較好的實用價值及應用前景。
1 FMCW雷達測距測速原理
調頻連續波雷達基本工作原理是通過連續周期性地調制發射信號頻率,并分析發射時刻和接收時刻的信號頻率,從而得出汽車周圍物體的相對距離和速度。
為了探測防區內的動態物體,雷達發射信號可以采用時域中線性的三角形頻率掃描,如圖1所示。這里Δf是掃描頻率的最大和最小值之差,Tm是掃描的時間。
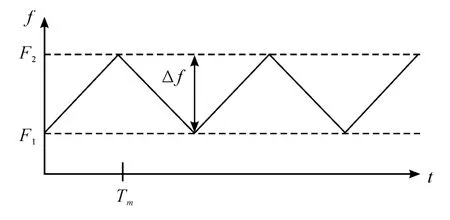
圖1 三角波調制信號
雷達接收到的物體反射信號與發射信號存在2R/c時間的延遲,如圖2所示。其中R是車與物體的相對距離,c真空中的光速,虛線表示的是物體靜態時雷達對應的接收頻率。

圖2 調頻連續波雷達工作原理
fb為拍頻,它等同于對靜態物體的發射和接收頻率之差。根據簡單的三角關系可得:

對于一個動態的物體,當觀察者以v相對速度向波源移動時,所接收到的波長為λ的信號的頻率相對于波源發出的頻率會有一個v/λ量的頻移,即多普勒頻移。對雷達來說,這個效應在信號的往返過程中發生了兩次。因此總的多普勒頻移可以表示:

對動態物體的發射和接收頻率之差可以表示:

Δf1和Δf2即中頻信號,它們是實際電路中需要通過雷達探測獲得的結果。通過簡單的公式變換可得:


將式(5)帶入式(1)并做適當變換即可得到距離R

將式(6)帶入式(2)并做適當變換即可得到相對速度v

2 算法設計實現
算法的主要設計依附于某微功率雷達系統的信號處理過程。該雷達系統的前端采用具有混頻功能的射頻天線頭,能夠完成發射信號和回波信號的混頻,采集部分可以直接面對中頻信號。依據系統探測范圍及奈奎斯特低通采樣定理可以確定本系統的采樣率,根據系統分辨率要求可以選擇快速傅里葉變換點數,考慮處理耗時、系統需求選擇和系統的運算處理能力,選擇在1 s內完成多次(例如20次)采集處理過程。每秒的采集處理時間片分配如圖3所示,以達到實時處理的目的。全系統處理流程如圖4所示。

圖3 1 s內采集處理時間片分配示意圖
2.1 動態背景建立
在進行當前時刻的處理時,實際上在系統中存儲了該時刻之前10次的采集結果,該10幀的結果可以用于背景的建立。每時刻采集完成后首先進行三角波調制信號的提取,根據FMCW信號的測速原理,可以得到該時刻的環境中是否存在運動目標。當測速結果顯示沒有運動目標時,則將存儲的10幀數據(不包含本時刻的數據)按照距離點求出每點的期望,由此得到當前時刻的參考背景,同時使用這些數據進行各點的方差計算,用以反映背景中各點的起伏趨勢。如果布防區域內始終沒有運動目標,則一直使用當前時刻之前的10幀數據進行背景建立,形成動態背景。
2.2 背景的使用
一旦布防區域內出現目標,并假設運動目標進入布防區域,會在防區內存在至少1 s的時間,依據上述的設計,共會進行20次有效目標的判定。FMCW信號測速過程會及時且無漏的反映出目標入侵的情況,由于有目標的介入,背景會出現較大的變化,故此時需要立刻停止背景的刷新,系統中鎖存無目標時的最后一組10幀數據。對于動目標檢測的處理過程,使用的是無目標情況下建立的最后一次背景,確保在目標檢測時使用的是最真實的背景,以提高檢測效果。
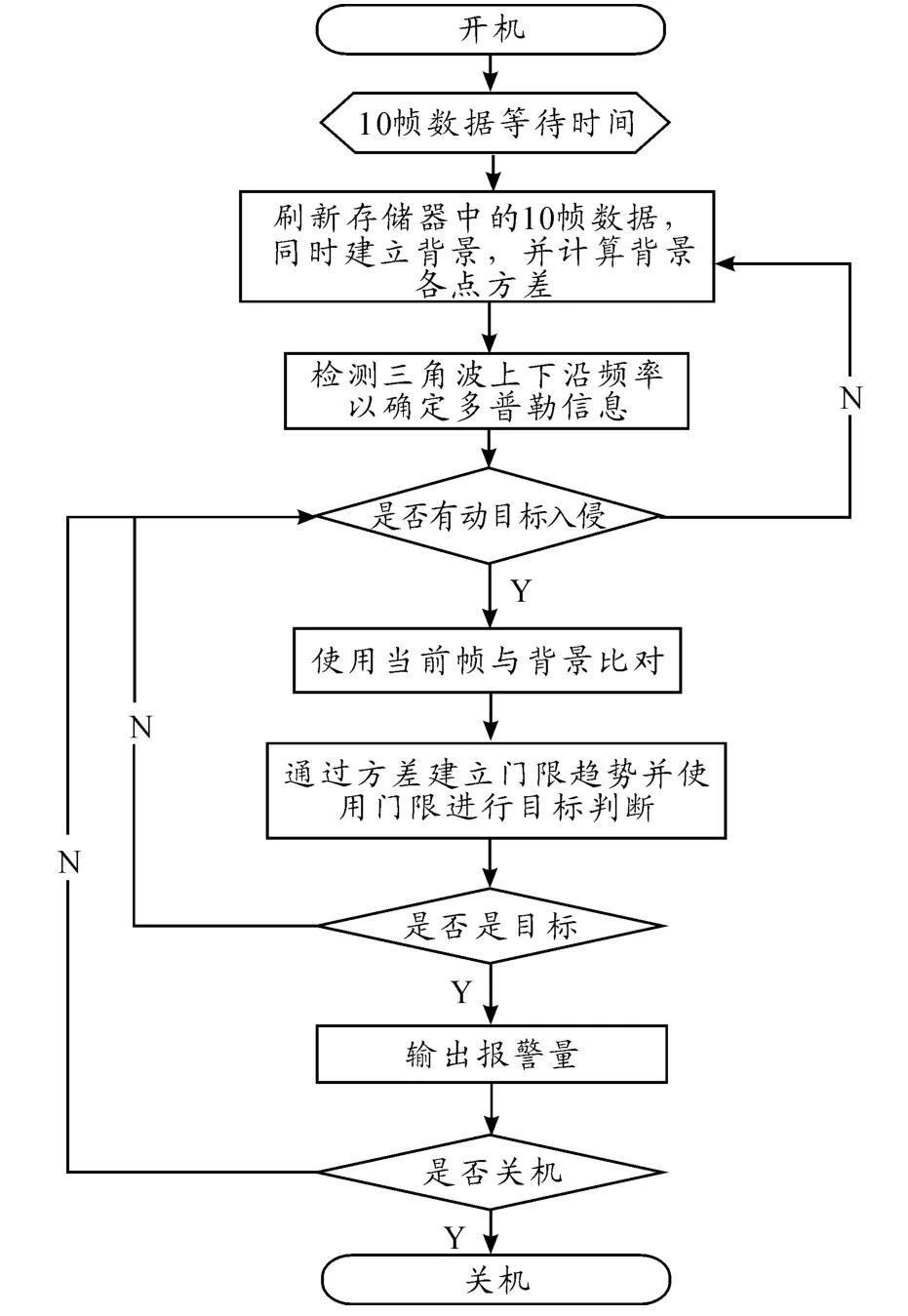
圖4 全系統流程
2.3 方差與門限
由于安防作用環境較為復雜,背景中可能包含了諸如鋼網、防爬網、樹木、墻壁等具有較強反射能力的物體,當目標進入防區時,除目標出現點會有回波能量增強外,因多徑反射、目標重疊等影響,一些不確定位置的能量也會增加,如圖5所示。

圖5 多徑反射后回波的可能性示意圖
若該影響明顯,則會出現目標距離模糊,如圖6所示,目標出現在L2位置,但是由于多徑和疊加導致L1和L3位置的幅值與L2的幅值達到同一量級,則無法區分目標和雜波。
選擇使用存儲10幀數據計算得到的方差作為參考可以有效解決這一問題,在沒有運動目標時計算得到的方差可以反映出環境背景中多徑和疊加的可能性,以動態的方差結果作為指導,可以準確劃出門限的趨勢,在當前一幀數據和背景數據進行比較時,可以通過對應點做除的方法進行,即用當前一幀數據除以對應的背景數據,有目標的位置得到的除結果會明顯大于其他各點,若由于多徑和疊加導致某點除結果與目標點位置的結果達到同一數量級,則該點的統計方差也一定較大,對于方差大的點,其判別除結果的門限值則需相應提高,如圖7所示,由此就減小了錯報的概率。
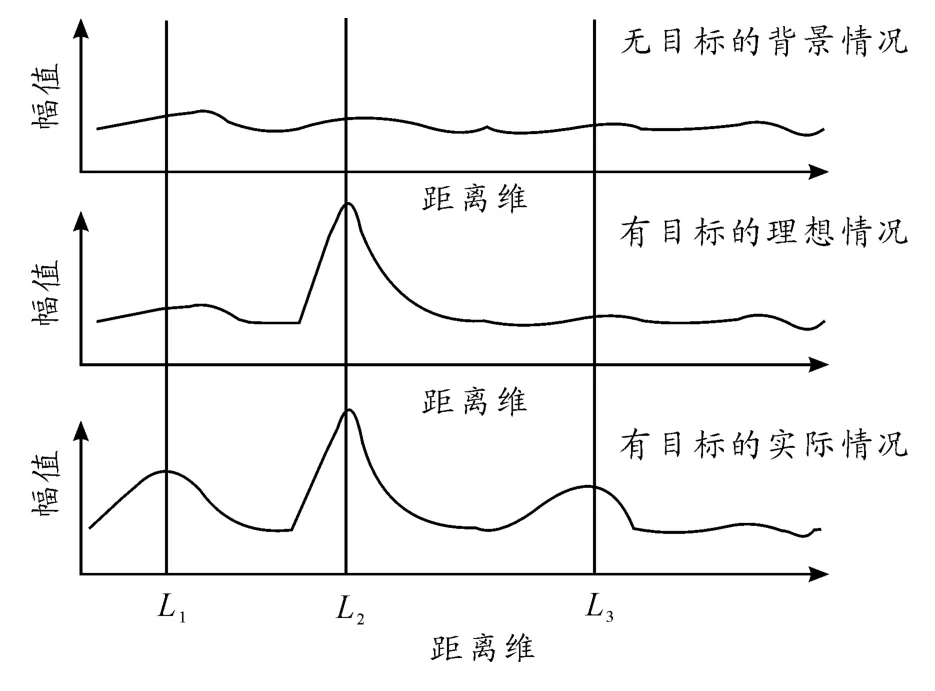
圖6 有無目標情況下的幅值比較示意圖
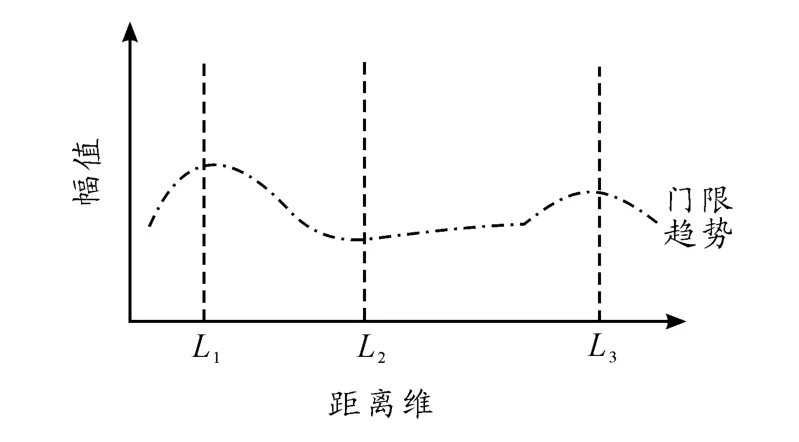
圖7 背景方差指導產生門限趨勢示意圖
2.4 恢復背景建立
當動目標始終在防區內運動時,防區中的多普勒頻率就一直不會為零,2.2小節中的處理過程也會反復執行。而當目標從防區內移出后,多普勒頻率會降至零,或微弱的運動物體不再觸發多普勒信息報警,此時系統重新進入動態背景刷新過程,以備下一次動目標入侵時檢測所用。
3 與現有技術相比的創新
本文提供的背景建立過程使用了當前檢測時刻附近的一個有效時間段內的背景信息,能夠真實和準確的反映在無目標時的背景情況,解決了因為背景建立固定而出現的環境過期問題。
背景建立中以多普勒信息為判定依據,當環境內的多普勒頻率信息為零時,則一直解算和刷新背景,而當環境內的多普勒頻率信息不為零時,則選擇暫時停止背景更新,有效的保證了目標檢測處理時背景的時效性。
這種方法免去了常規安防雷達中需要開機學習數分鐘的過程,使用本方法的雷達根據選擇有效時間段的長度,在開機后1~2 s內即可開始實施目標檢測,簡化了開關機操作過程,提高了雷達安裝的運行效能。
為減小檢測過程中因為背景起伏造成的影響,使用了建立背景時用到的多幀背景數據,并計算出每個距離點的方差,通過方差反映背景的起伏趨勢,以指導檢測門限的選擇。
4 結束語
本文介紹了一種建立動態參考背景的方法,確保動目標檢測時的參考背景具有較強的時效性,同時使用方差反映背景變化趨勢。通過使用本文提供的方法,可以有效的提高雷達檢測正確性,并且經過工程實踐檢驗,該方法對系統改善效果明顯。這種方法具有較強的普適性,雖然在民用安防領域首先進行驗證和使用,但適用情況不局限于此,對于需要異常情況與常規情況進行比對的任何模型,本文建立動態參考和使用方差進行趨勢預判的方法都可以被使用。
[1]胡廣書.數字信號處理——理論,算法與實現[M].北京:清華大學出版社,1997.
[2]楊建宇,凌太兵,賀峻.甘MCW雷達運動目標檢側與距離速度去藕合[J].電子與信息學報,2004,26(2):169-173.
[3]劉麗華,董天臨.連續波多普勒測速雷達射頻前端電路設計與仿真[J].電子科技,2007(5):20-25.
[4]徐小平,劉建新,韓宇,等.FMCW測距雷達數字信號處理器設計仿真[J].信息與電子工程,2004,2(2):133-135.
[5]Meta A,Hoogeboom P.Signal Processing Algorithms for FMCW Moving Target Indicator Synthetic Aperture Radar[C]//Proc IEEE Int Geoscience and Remote Sensing Symp.IGARSS 05.Seoul:IEEE,2005:316-319.
[6]胡漢南.線性FMCW雷達中頻信號的采樣準則和頻譜特性[J].中國航海,2000(1):78-84.
[7]蔣宇柏,游思晴.軟件無線電原理與工程應用[M].北京:機械工業出版社,2006:38-51.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
當代陜西(2020年14期)2021-01-08 09:30:42
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
