一種分級網絡架構的煤礦綜合監控系統設計
2013-09-10 08:34:00郭新軍
自動化儀表 2013年5期
王 剛 郭新軍
(河南工程學院電氣信息工程系,河南 新鄭 451191)
0 引言
隨著工業化的發展,人們對能源的要求越來越多,作為能源主流之一的煤炭,其需求也日益旺盛。我國煤炭資源豐富但礦藏條件復雜,據資料表明,我國約47%的礦井是高瓦斯或瓦斯突出礦[1]。這些礦藏的開采,若沒有相應的監測技術,就易出現礦井安全事故。因此,對礦井里的現場作業環境、電氣線路和工作設備的運轉情況進行全面而有效的監測和控制,構建對煤礦井上、井下可靠安全預警和決策管理的綜合監控系統,對保障煤礦的安全高效生產具有重大的意義。
目前,礦井中普遍使用由RS-485總線組成的半雙工、巡檢式監控系統[2]。這類系統存在實時性差、數據速率低、可靠性不高等缺點。另外還有一些監控內容比較單一的系統[3-4],這些監控系統很難滿足作業情況復雜的礦井對安全監控的要求。為此,本文提出了一種分級網絡框架的CAN總線監控系統。該系統的主干CAN網采用總線拓撲結構,二級CAN網采用星型拓撲結構。根據監控對象的不同,主干網和二級網通信節點分別采用不同的智能節點設計。
1 CAN總線的通信模型
由CAN總線架構的通信網絡,遵守開放系統互連(open system interconnection,OSI)規范,結構上采用層次設計[5]。作為工業現場測控底層網絡,通信網絡對信息傳輸的實時性要求較高,網絡互聯結構較簡單。因此,CAN總線網絡在通信底層僅采納了開放系統互連。
通信模型的最低兩層為物理層和數據鏈路層,而模型的高層為應用層。CAN數據鏈路層由邏輯鏈路控制(LLC)子層和媒體訪問控制(MAC)子層構成。物理層決定信號的傳輸方式,是網絡設備間通信的物理電氣線路,用于實現通信總線驅動和數據流傳輸;MAC子層是實現CAN協議的核心層,它用于約定網絡上通信數據的傳送規則,即控制幀結構、執行仲裁、錯誤檢測、出錯標定和故障界定等;LLC子層則實現報文濾波、總線超載通知和總線恢復管理等功能。物理層和數據鏈路層的功能可由網絡中的CAN接口控制器完成,而應用層的功能由微處理器或工控機上相應的進程完成。CAN網絡的通信模型如圖1所示。
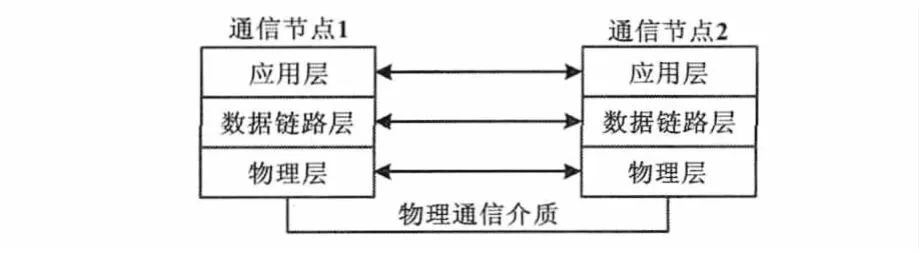
圖1 CAN網絡通信模型Fig.1 CAN network communication model
2 系統網絡架構
CAN總線為串行總線,因此由其架構的分布式工業測控網絡按照串行通信式網絡實現,其網絡架構如圖2所示。
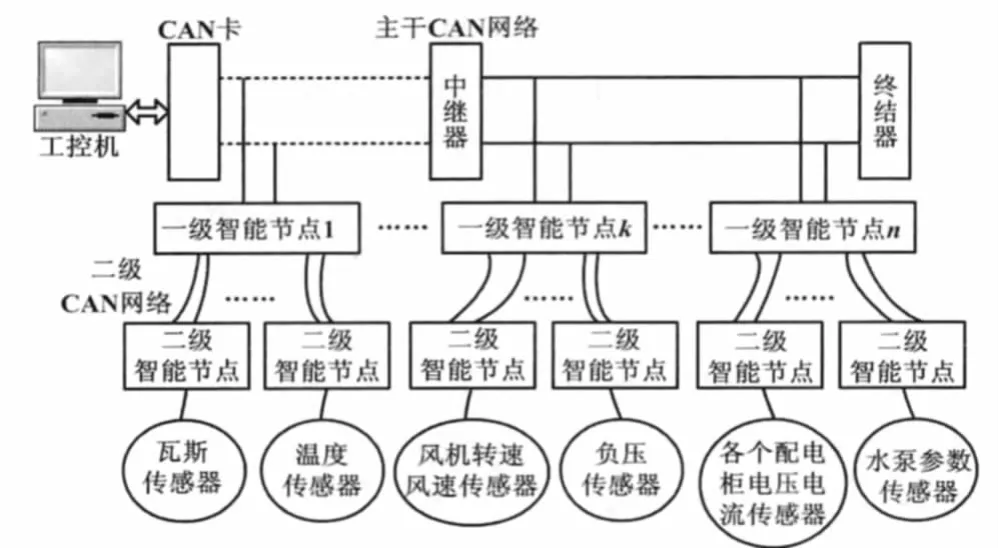
圖2 CAN總線分級網路拓撲圖Fig.2 CAN bus hierarchical network topology
主網絡采用總線型拓撲結構,二級網絡采用星型拓撲結構,CAN網絡的物理電氣線路采用屏蔽雙絞線。煤礦綜合監控系統中的現場測控設備依靠二級智能節點模塊,經二級CAN總線網絡掛接在一級智能節點上,由一級智能節點信息處理后接入主網絡總線上。主網絡CAN總線是由工控機上PCI插槽中的CAN卡引出并驅動。分級網絡可以避免主網絡上的節點數目過多這一問題。盡管理論上CAN2.0節點數可以有很多,但受實際工程中電氣負載的影響,如驅動負載的電阻[6],其節點數目受到很大的限制。網絡上節點估計一般按照以下公式進行計算[7]:

式中:Rdiff.min為網絡中的節點最小差動輸入電阻;RL.min為網絡中CAN總線驅動器的最小負載電阻;RT.min為網絡中的最小終端電阻。
另外,CAN總線數據傳輸采用時分復用原則。如果主網絡上節點數太多,對于多主動通信的CAN總線網絡來說,無疑會提高網絡阻塞的幾率;且節點太多時,CAN的仲裁機制會增加一些節點數據通信的時延。因此,本系統采用二級網絡結構,以減小主干網絡的時延和堵塞。若主網絡架設距離比較長,根據實際工程需要,應在網絡中接入中繼器,以保證主網絡總線上較高的通信速率和通信數據的可靠性。主網絡需要在總線的終端接入總線終結器,以防止通信信號回波的反射干擾。工程上,一般采用一個與總線介質特性阻抗相匹配的電阻來實現。
3 通信模塊硬件電路設計
3.1 一級智能節點設計
微處理器字長的選擇與數據吞吐量和對處理數據精度的要求等有關。本文設計的CAN通信控制器采用SJA1000[8],其數據接口為8位,這決定了即使選用字長超過8位的微處理器,其每次與SJA1000的數據交換量也是1 B,所以本系統選用8位的微處理器STC11F60XE。該處理器內核采用增強性51內核,工作頻率最高可達35 MHz,數據的處理速度是普通51核的8~12倍,具有很強的抗干擾性,完全滿足煤礦現場工程環境和CAN總線一級智能節點的硬件要求。在本設計中,STC11F60XE所有外圍等硬件資源都得到了充分的利用。
一級智能節點硬件架構如圖3所示。
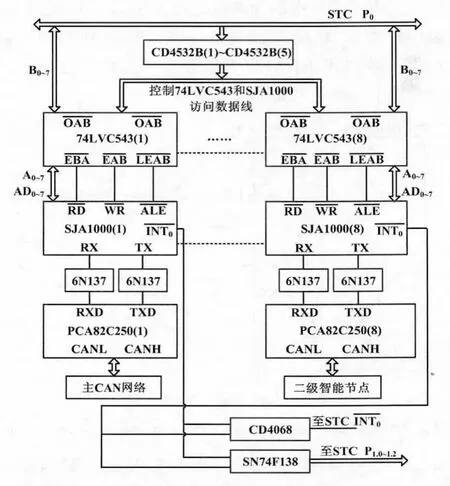
圖3 一級智能節點硬件架構Fig.3 Hardware architecture of the 1st level intelligent node
一級智能節點模塊由微處理器STC11F60XE、CAN通信控制器SJA1000、CAN總線收發器PCA82C250、高速光電耦合器6N137、8路輸入的與門CD4068、譯碼器SN74F138、編碼器CD4532B以及匹配接口電路等部分組成。

3.2 二級智能節點設計
二級智能節點模塊由微處理器STC11F60XE、CAN通信控制器SJA1000、高速光電耦合器6N137、CAN總線收發器PCA82C250以及監控接口電路等組成。二級智能節點硬件架構如圖4所示。
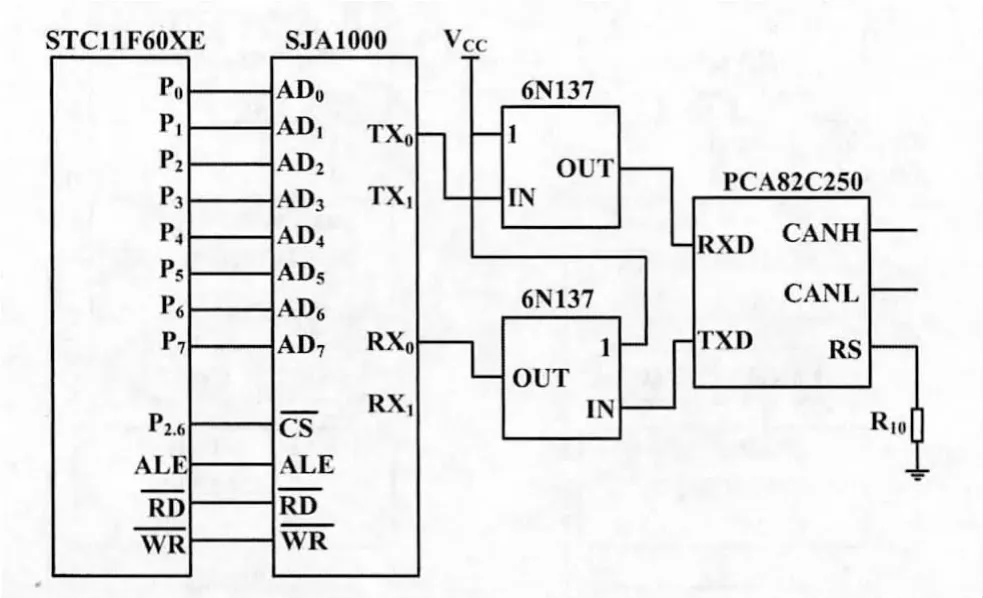
圖4 二級智能節點硬件構架Fig.4 Hardware architecture of the 2nd level intelligent node

PCA82C250 CAN總線收發器用作SJA1000和CAN物理傳輸線路之間的接口芯片[9]。PCA82C250工作在額定電壓為12 V的CAN總線系統中,為總線提供差動驅動。PCA82C250數據的通信速率由RS腳與地之間連接的電阻值R10決定。當R10=0時,即把該引腳直接接地,PCA82C250處于高速通信方式。這種情況下,應避免高頻干擾,為此建議使用屏蔽電纜作為總線的物理通信介質。
通常情況下,根據實際工程中通信的速率選擇相應的阻值,R10的取值范圍一般在16~200 kΩ。考慮到二級智能節點位于數據采集現場(有時距離一級節點較遠),同時兼顧傳輸速率,本系統二級節點電阻R10取47 kΩ。
4 結束語
CAN作為一種比較實用的工業現場控制總線,具有高速率、長距離、高可靠性等優點。它已成為目前工業控制領域常用的現場總線[10]。本文提出的分級CAN網架構的煤礦綜合監控系統,能夠減少主網的信息堵塞和信息數據的延遲,在組網通信試驗中,較好地實現了分級網絡架構中智能節點間以及智能節點與服務器間的數據通信。
[1]姚元領,司俊鴻.淺談有關瓦斯壓力測定的一點認識[J].能源技術與管理,2010(2):34-36.
[2]林雪峰,劉勝,李柏均.RS-485總線在煤礦安全監控系統應用中的可靠性設計[J].礦業安全與環保,2006,33(z1):29 -31.
[3]殷俠.基于CAN總線煤礦高溫安全監控系統的研究[J].煤炭技術,2011,30(9):123 -125.
[4]杜輝.基于CAN總線的礦井通風監測系統[J].計算機工程與設計,2009,30(15):3565 -3567.
[5] BOSCH Corporation.CAN Specification V2.0[EB/OL].[2000 -11-20].http://www.can-cia.org
[6] Dougles E.Computer networks and internets[M].New Jersey:Prentice Hall,2000.
[7]饒志強,嚴國萍,阮幼林,等.基于CAN的最大總線長度和節點數求解方法[J].通信和計算機,2007(4):5 -8.
[8] Pillips.SJA1000 specification[EB/OL].[2000 - 12 - 01].http://www.semiconductor.philips.com.
[9] NXP Corporation.PCA82C250 product data sheet[EB/OL].[2000-01 -11].http://www.nxp.com.
[10]柴鈺,張奇.CAN總線技術在工業報警網絡系統的應用[J].自動化儀表,2011,32(2):43 -48.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年4期)2016-05-04 04:00:23
現代企業(2015年8期)2015-02-28 18:55:34
