太陽能電池板捕光及除塵系統
2013-09-08 09:15:50楊景發鄒鵬飛李文靜侯國棟蘇安閣
實驗技術與管理 2013年8期
張 瑋,楊景發,鄒鵬飛,李文靜,侯國棟,蘇安閣
(1.河北大學 物理科學與技術學院,河北 保定 071002;2.保定市第一中學,河北 保定 071002)
太陽能作為取之不盡、用之不竭的第一大清潔能源,已成為世界各國競相開發的重點[1],太陽能光伏發電具有安全可靠、無污染、無噪聲等優點。2010年中國太陽能光伏并網發電年新增安裝容量(峰值功率)138MW,累計安裝500MW。太陽能產業已成為全球發展最快的新興行業之一。但同時太陽能也存在著密度低、間歇性、光照方向和強度隨時間不斷變化等問題。
光伏發電系統的光電轉化裝置——陣列式太陽能電池板,多采用固定式安裝,不能實時追蹤太陽位置的變化,致使采光效率較低,影響光電轉換效率。另外,由于電池板表面充分裸露在室外空氣中,隨著時間積累,空氣中的無機和有機灰塵會逐漸積累在其表面,既降低電池的能量轉換效率,也容易因“熱島效應”造成電池局部發熱而損壞,導致太陽能蓄電池因不能保持足夠的電量而大大縮短壽命。綜合比較實現追蹤太陽的單軸追蹤、雙軸追蹤、光敏電阻光強比較等方法[2],以及人工擦拭、刮刷式、高壓水流/氣流清潔等電池板除塵方法[3],我們設計了集“聚光”、“電池板傾角調節”、“平行于地軸的定點定角單軸追蹤”和“高壓風力除塵”于一體的“太陽能電池板捕光及除塵系統”,充分提高太陽能電池的光電轉化率。
1 設計原理
1.1 追蹤/不追蹤太陽照度比較
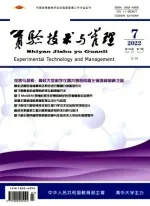
在空曠的樓頂進行對比實驗,通過測量追蹤太陽與不追蹤2種情況下的太陽照度(EA為不追蹤太陽時的照度,EB為追蹤太陽時的照度),來比較太陽能電池板的受光情況,測量結果見表1。由表1可得出:當對太陽進行追蹤時,其照度值比不追蹤時平均高出約29.8%。
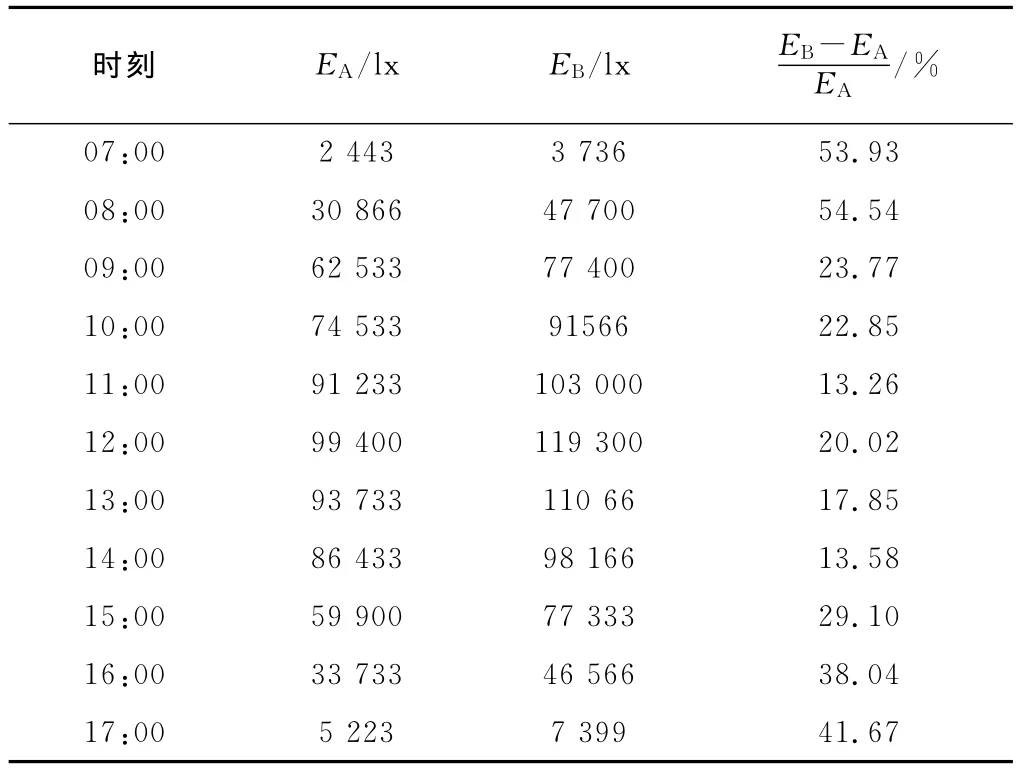
表1 追蹤/不追蹤太陽照度
1.2 光強對太陽能電池開路電壓和短路電流的影響
利用FZ-GDD硅光電池特性實驗儀,調整電池板與光源之間距離,測量不同距離下電池板的開路電壓UOC和短路電流ISC,測量結果見圖1。
圖1 硅光電池板光照效應
1.3 保定地區太陽運行軌道圖
太陽高度角α、太陽赤緯角δ和太陽方位角的計算公式[4]分別為:

式中,φ為當地的地理緯度[5],ω為太陽時角,N 為從1月1日起,到該天的天數。
根據以上式計算與太陽能應用有關的參數,并由所得數據獲得了太陽運行軌跡,見圖2[6]。
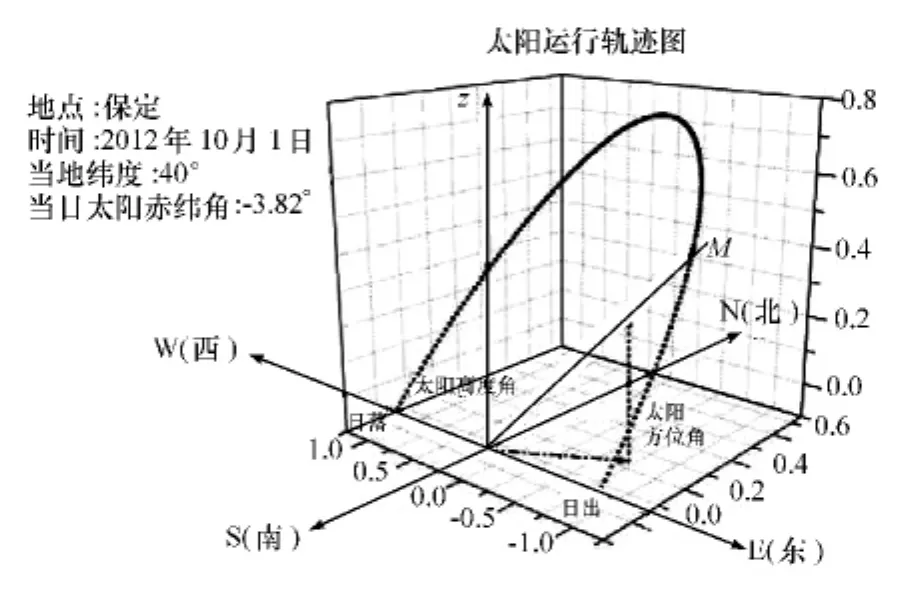
圖2 保定地區太陽軌跡圖計算模擬
1.4 太陽能電池板傾角選擇
根據地球繞太陽運行的規律可知:即使在同緯度的地方,在不同的季節,太陽的入射角也是不同的。依據本次設計并參考相關文獻中的資料,為獲得最大的日射量,電池板的傾角β推薦值如下:全年使用,β=φ,夏季(從春分到秋分)使用,β=φ-10°;冬季(從秋分到春分)使用,β=φ+10°;由保定的地理位置可得,夏季太陽能電池板傾角為38°,冬季為43°。
2 太陽能電池板捕光與除塵系統的設計
太陽能電池板捕光與除塵系統主要由聚光模塊、追蹤模塊、高壓風力除塵模塊和電源模塊等部分組成,見圖3。
2.1 聚光模塊設計
利用聚集反射技術,在太陽能電池板的左右兩側布置反光鋁板,通過實驗比較,確定鋁板和太陽能電池板夾角,使太陽能電池板接收盡可能多的太陽能,減小太陽能量的分散性和太陽光的不均勻性,提高光電轉換效率。
經過計算比較,將鋁板和太陽能電池板成60°角布置時,在電池板受光面積不變的情況下,其使用的反射鋁板的面積最小,成本也就低。聚光板塊結構示意見圖4。
2.2 太陽能電池板追蹤模塊設計
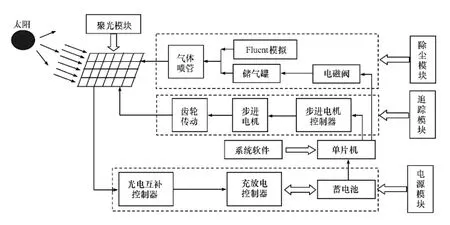
圖3 太陽電池板捕光及除塵系統結構框圖
追蹤模塊采用“平行于地軸的定點定角單軸追蹤”系統,包括硬件結構和軟件兩部分。首先進行初始設定:根據不同的季節、地理緯度,通過手動旋鈕設定電池板的安裝傾角;通過軟件設定每個時鐘點的水平方向旋轉角度。設定完成后,系統軟件發出控制信號(步進時鐘脈沖)驅動步進電機帶動小齒輪轉動,小齒輪帶動大齒輪和主軸轉動,實現電池板單軸(東西向)跟蹤。
2.2.1 追蹤模塊的硬件結構設計
追蹤模塊硬件主要由底座、主軸、齒輪、軸承和步進電機[7]、手動刻度旋鈕等部分組成,見圖5。

圖4 太陽電池板聚光結構示意圖
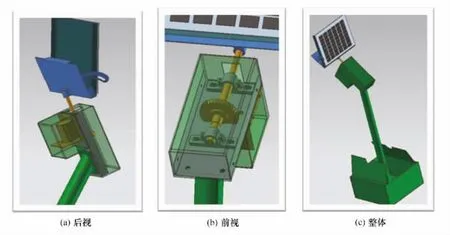
圖5 追蹤模塊后視、前視和整體結構
該系統設計要點:主軸與地軸平行;根據電池板質量確定扭矩,進而選擇步進電機的型號和驅動器;通過齒輪嚙合,實現變速;使用軸承減小阻力;硬件部分安裝在立桿的頂部平臺上,樣機設計時,縮短立桿;控制箱設計在底部。設計時先進行Pro/E模型設計[8],再進行CAD設計。
2.2.2 電池板專用調角盤
設置一個“電池板專用調角盤”(見圖6),用于調節太陽能電池板的傾角。根據地理緯度、不同的季節,通過手動旋鈕方便、準確地設定電池板的安裝仰俯角。
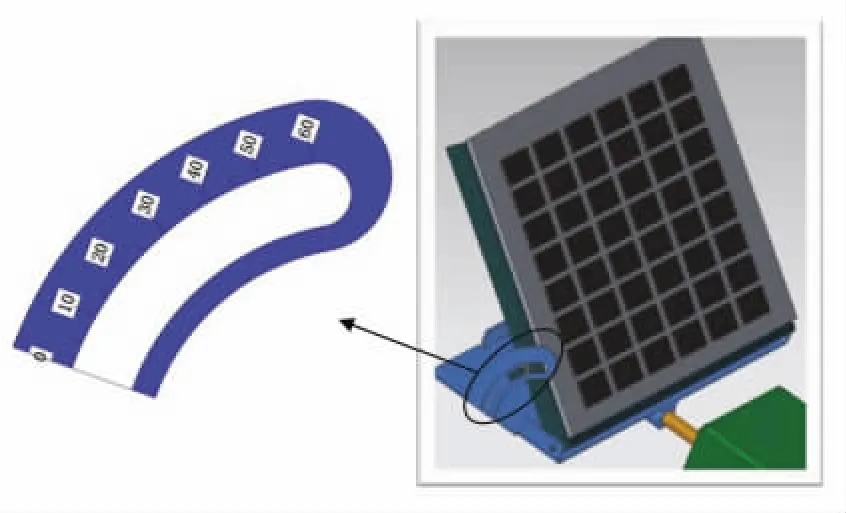
圖6 太陽電池板專用調角結構
2.2.3 單片機主控器硬件接口電路設計
利用單片機最小系統,分配步進電機的控制端口,設計控制接口電路(見圖7),用繼電器實現小電流控制大電流,完成電池板追蹤旋轉。
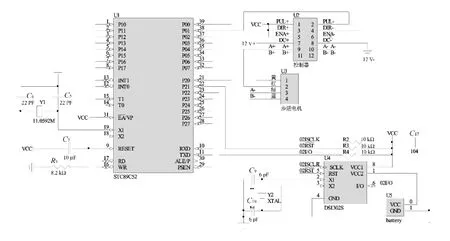
圖7 單片機控制接口電路
2.2.4 追蹤模塊的軟件設計
跟蹤系統軟件設計所用單片機為STC89C54,系統軟件采用C語言編寫,依據跟蹤方案,完成時鐘、定點旋轉角度和自動復位設定[9],程序流程圖見圖8。
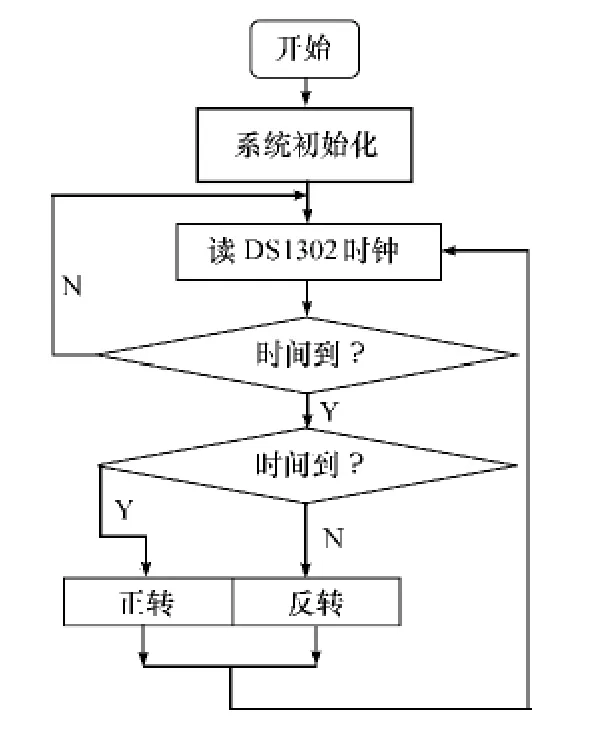
圖8 程序流程圖
2.3 高壓風力除塵結構設計
在太陽能電池板的高端斜后方,安裝一個帶傾角的氣體噴管。首先進行噴管進風口和出風口設計[10]。設計時,參照相應的流體力學知識,為使噴管出風較為均勻,且在一定長度距離內使水頭損失、能量損失達到最小。利用流體力學fluent軟件對進風口個數、出風口孔洞形狀(圓/方)、個數進行模擬比較[11]。
由模擬分析可知:2個進風口、每個分管一段,出風口形狀為圓形,多個出風口的效果最好,風量均勻,風速較大,而出風口開成狹縫以后,風速較小,達不到除塵要求。故最終設計為:2個進風口、17個圓形出風口。進風口通過軟管經控制閥與高壓儲氣罐連接,利用單片機定時點開啟控制閥,一定壓力的氣體通過小孔均勻噴出,轉化為高速微細氣體射流,形成對電池板表面的噴射力,實現較大面積除塵。
2.4 太陽能電池板光電互補電源模塊設計
太陽能發電系統由太陽能電池板、太陽能控制器、蓄電池(組)組成,同時備用了一套AC/DC市電供電系統實現光電互補[12],可在2種供電方式中自由切換,以保障系統的運行的穩定性,增強實用性。
2.5 整機設計與制作
本系統由太陽能電池板跟蹤裝置、風力除塵裝置和控制電路硬軟件等部分組成。制作初期設計了多種樣機模型,經多次論證,確定最終的結構。制作過程中嚴格遵循科學布局、結構嚴謹、務實簡潔的思想,按照機械制作標準制作而成,樣機見圖9。

圖9 太陽能電池板捕光及除塵裝置
3 結論
本系統是基于單片機的自動控制系統,配合精密機械裝置使系統更加穩定,提高系統追蹤太陽的精度,獨創的高壓風除塵法,能夠有效除去太陽能電池板表面灰塵,顯著提高了太陽能光伏發電系統的綜合發電效率。太陽能具有潔凈、方便、無盡等優勢,有理由相信,本項目成果的轉化,必將產生可觀的環境效益、經濟效益和社會效益。
(References)
[1]吳紅山.太陽能的應用現狀及發展前景[J].科技信息:學術研究,2008(7):72-74.
[2]程智峰,鄭浩俊.一種利用高壓水流對太陽能電池板陣列自動除塵的系統:中國,201950044[P].2010-12-28.
[3]周詩悅,朱凱,劉爽.太陽能電池板自動跟蹤系統[J].控制工程,2009,16(增刊):17-19.
[4]關繼文,孔令成,張志華.高精度太陽能跟蹤控制器設計與實現[J].自動化與儀器儀表,2010(3):23-25.
[5]羅運俊.太陽熱水器技術講座(一):太陽熱水器發展概況及基本知識[J].可再生能源,2004(1):58-61.
[6]徐利,曹瑩,是度芳.太陽能電池板跟蹤與太陽相對地面的運動軌道研究[J].科技創新導報,2010(29):12-13.
[7]陳旭平,熊德敏,胡聯紅.步進電機在太陽能跟蹤器上的應用[J].今日科技,2008(8):46-47.
[8]任豐蘭,曾經梁.PRO/E軟件在機械制圖中的應用[J].農機使用與維修,2012(5):91-93.
[9]李杜.以STC89C52RC為核心的實用單片機教學板設計[J].湖南工程學院學報,2012,22(3):18-20.
[10]程智峰,鄭浩俊.一種利用高壓氣流對太陽能電池板陣列自動除塵的系統:中國,201950[P].2010-12-28.
[11]郭婷婷,李雪梅,馮博.電除塵器內斜氣流特性的數值研究[J].華北電力大學學報,2008,36(5):50-55.
[12]賁禮進,曹瑩,倪有軍.太陽能家用電站系統設計方法[J].新能源,2010(12):53-55.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16