雙離合器式混合動力汽車模式切換控制策略*
2013-09-08 03:48:18黃劍峰秦大同
汽車工程 2013年8期
楊 陽,黃劍峰,秦大同,蘇 嶺
(1.重慶大學,機械傳動國家重點實驗室,重慶 400044;2.重慶長安新能源汽車有限公司,重慶 400023)
前言
為有效降低汽車油耗和排放,強混合動力汽車已經成為世界各大汽車公司研究開發的熱點。其在結構上較多地采用了雙電機加行星排的混合動力系統(如Prius),其特點是運行平穩,但成本較高[1-3]。
在強混合動力汽車中,能量管理策略與轉矩協調算法已成為重要的研究內容。文獻[4]中采用了基于邏輯門限值的能量管理策略,限制發動機工作在高效率區間,提供要求的轉矩。但邏輯門限值只是直觀地在發動機萬有特性圖上劃分出工作模式區域,未考慮發動機效率與電機的轉矩。文獻[5]中提出了“內燃機轉矩開環控制+電機轉矩補償控制”;文獻[6]中采用了“穩態轉矩分配+發動機動態轉矩估計+電機轉矩補償”的動態協調控制算法。但兩者均未考慮離合器接合的動態過程。文獻[7]和文獻[8]中將混合動力汽車工作模式劃分為子域,分析了混雜系統的切換,控制離合器接合時刻,對模式切換過程進行了研究,但未對離合器接合過程進行具體控制。
本文中以新型的單電機、雙離合器式強混合動力長安轎車為研究對象,通過對系統構成和工作模式進行分析,按發動機效率與電機轉矩劃分了工作模式區域,制定了能量分配策略。在此基礎上,重點研究行進中電機起動發動機過程的動態轉矩協調控制策略與限矩離合器接合的模糊控制策略,并進行仿真分析與臺架試驗,以實現該過程動力傳遞的平穩性與乘坐的舒適性。
1 系統組成和運行模式分析
1.1 系統組成
強混合動力長安轎車結構方案如圖1所示。發動機與電機之間通過單向離合器與限矩離合器相連。限矩離合器的使用使電機起動發動機的過程平穩可控,且能保證電機有足夠的輸出動力,不會產生動力不足或中斷。單向離合器保證起動完成后,發動機轉速不高于電機轉速,實現發動機動力傳遞。
當限矩離合器斷開時,可由驅動電機單獨提供所需轉矩驅動車輛運行。在限矩離合器接合過程中,驅動電機可在驅動車輛的同時起動發動機,電機提供的驅動發動機轉矩由限矩離合器限定(約55N·m),不造成動力中斷。當發動機起動過程完成后,限矩離合器分離,單向離合器鎖止,發動機與電機可共同驅動車輛行駛或由發動機單獨驅動。
1.2 運行模式分析
為便于進行動力學分析,將模型圖進行簡化,忽略旋轉黏性阻尼的作用,見圖2。本文中重點研究驅動工況,對于制動及其相關的工況不予討論。
(1)純電動工況 在低需求轉矩或低速運行的情況下,汽車以純電動工況運行,限矩離合器分離,發動機不起動,汽車所需要的動力由電機單獨提供。此時,
(2)行進中電機起動發動機 當車速提高或需求轉矩增大時,單獨電機驅動不能滿足需求,須從純電動工況轉換到發動機驅動工況。在此過程中,電機不僅要提供車輛運行所需求的轉矩,還要保證能順利起動發動機。限矩離合器接到接合指令,開始接合滑摩,主從動片有轉速差,此時,
當離合器結合,發動機起動完成后,電機并沒有馬上退出工作,而是對發動機轉矩進行補償,避免產生轉矩波動。當發動機完全起動,汽車將以發動機單獨驅動工況運行。
(3)發動機單獨驅動 限矩離合器分離,由單向離合器傳遞轉矩,可以減少限矩離合器使用時間,延長其壽命。此時,
(4)聯合驅動 發動機與電機共同輸出轉矩,由單向離合器傳遞。此時,
(5)行車充電 當電池的電量不足,需要充電時,發動機不僅須提供車輛運行所需轉矩,還要提供充電轉矩。單向離合器工作,限矩離合器分離,電機作為發電機給電池充電。此時,
采用沖擊度來評價模式切換的控制效果,可表示為
沖擊度反映轉矩波動的情況,沖擊度越大,平順性也就越差。沖擊度的量化指標各國不盡相同。我國的推薦值為 |J|≤17.64m/s3[9]。
2 模式切換的轉矩協調控制策略
2.1 轉矩管理策略
2.1.1 工作模式區域劃分
發動機工作在低轉速、小負荷時,效率較低,要發揮混合動力汽車的優勢,則須對工作模式的區域進行劃分,這也是進行模式切換的前提。
由于邏輯門限值控制策略的不足,本文中在結合電機特性,保證電機在需要起動發動機時要能提供足夠的起動轉矩和汽車運行所需轉矩的基礎上,以發動機油耗為重點,選取發動機油耗小的點進行工作區域的劃分。通過試驗,得到發動機轉矩、轉速和燃油消耗率的相關數據,繪成三維油耗圖見圖3,工作區域的劃分如圖4所示。
圖4中a為發動機工作最小轉矩曲線,b為通過試驗獲得的發動機最優經濟曲線,c為電機功率輔助最小轉矩曲線。這些曲線將發動機穩態圖劃分成不同的區域:(1)為純電動工作區,(2)為發動機單獨工作區,(3)為發動機與電機聯合驅動工作區。當發動機轉速小于1 000r/min時,其效率很低,且電機在低速時,可提供較大的轉矩,因此在這個區域均由電機單獨驅動,以提高經濟性。
2.1.2 轉矩管理策略的實現
轉矩管理策略是為了將需求轉矩實時合理地分配給發動機和電機,提高混合動力汽車的效率。在正常情況下,駕駛員需求轉矩的優先級高于電池充電需求轉矩的優先級。如果需求轉矩是在發動機與電機聯合工作區,即使電池處于低效率區,電池也必須工作在放電狀態,使混合動力汽車進入功率輔助狀態,以滿足動力性需求。其轉矩管理策略見表1,其中SOCmin、SOClow和SOChigh表示允許放電最小值、高效區下限值和高效區上限值;Td_req、Tm_ass、Tch_req、Te_max和Tm_max表示需求轉矩、電機助力最小轉矩、充電需求轉矩、發動機最大轉矩和電機最大轉矩;ne_min表示發動機運行的最低轉速。
2.2 轉矩協調控制策略
由于發動機和電機的轉矩變化時間常數相差很大,如果僅僅由油門開度對發動機的轉矩進行開環控制,將使發動機的動態轉矩嚴重滯后于電機的轉矩變化,而且動態過程中發動機的轉矩控制還與瞬態空燃比控制和其他補償措施有關,使其動態性能不能滿足要求[10]。此外,在有濕式離合器接合的過程中,還須對離合器油壓與電機轉矩進行控制,否則會使輸出轉矩產生波動。行進中電機起動發動機是模式切換中一個十分重要的過程,將直接影響動力傳遞的平穩性與乘坐的舒適性,包括發動機起動與限矩離合器接合的動態過程,本文中重點研究其動態轉矩的協調控制策略。
當滿足模式切換條件,車輛須要起動發動機時,首先發出限矩離合器接合指令,要對其油壓進行控制。在滿足平順性的前提下,盡量減少其接合時間。接合過程中電機轉矩與限矩離合器的接合動作需要動態協調控制,以保證發動機正常起動且不對車輛的正常行駛造成過大的沖擊。限矩離合器的結構確定后,滑動摩擦力矩取決于作用在摩擦面上限矩離合器的油壓大小,因此對限矩離合器目標油壓的控制至關重要。
離合器接合過程與油門開度、油門開度變化率及電機與發動機轉速差等相關,各參數之間的關系難以用精確的數學模型表示,使用傳統的基于模型的控制方法不能滿足要求。采用模糊控制,無須建立精確的模型,能較好地識別各參數之間的關系,可在不同工況下選擇合適的語言變量和控制參數來實現對離合器的合理控制。因此,采用模糊控制策略對離合器進行控制,其初始壓力和滑摩階段的油壓控制對接合性能影響很大,是研究的重點[11]。
2.2.1 初始接合壓力控制
離合器初始接合壓力為離合器預設初始壓力p0與離合器初始壓力增量Δp之和,其中p0為設定值,Δp為模糊控制器輸出,由駕駛員意圖決定。油門開度和油門開度變化率可反映駕駛員意圖,當加速踏板行程大且變化率大時,表明駕駛員希望車輛快速進入動力更強的工作模式,應優先考慮動力性,輸出較大的離合器油壓增量Δp,以建立較高的初始壓力;反之,當加速踏板行程小且變化率小時,優先考慮平順性與舒適性,建立較低的初始壓力,以降低沖擊度。因此,建立離合器油壓增量的模糊控制規則應遵循:當油門開度小且變化率小時,初始接合壓力小;當油門開度小且變化率大時,初始接合壓力中等;當油門開度大且變化率小時,初始接合壓力中等;當油門開度大且變化率大時,初始接合壓力大。對此規則進行細化則可得到所有離合器油壓增量的模糊控制規則。
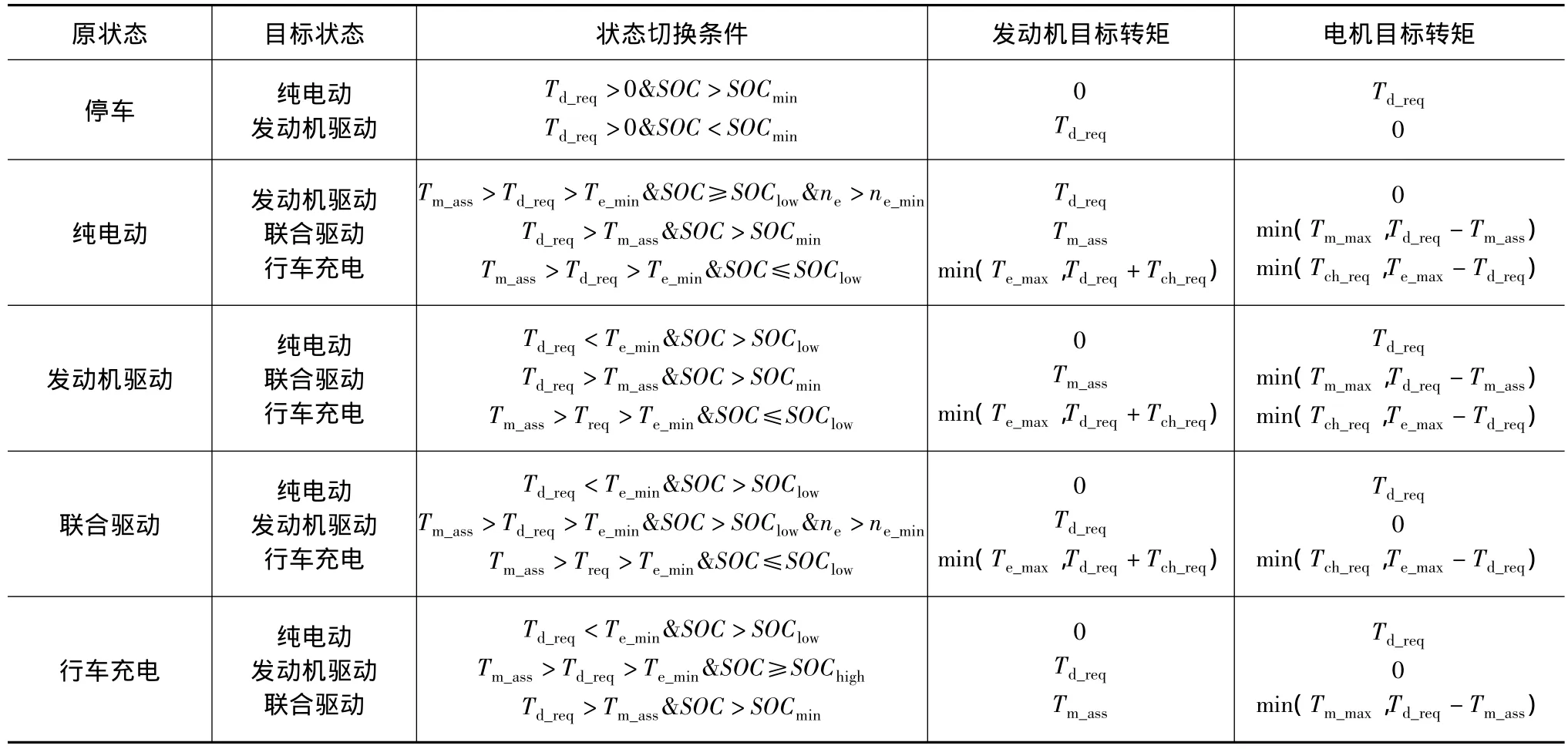
表1 轉矩管理策略
模糊控制器的第1個輸入為加速踏板行程α,模糊論域(0,1),模糊語言變量為{非常小,小,較小,中,較大,大,很大},相應的模糊子集為{VS、S、MS、M、MB、B、VB}。第2個輸入為加速踏板行程變化率α·,模糊論域(0,12),模糊語言變量為{非常小,小,較小,中,較大,大,很大},相應的模糊子集為{VS、S、MS、M、MB、B、VB}。輸出為 Δp,模糊論域(0,12),模糊語言變量為{非常小,小,較小,中,較大,大,很大},相應的模糊子集為{VS、S、MS、M、MB、B、VB},隸屬函數均為高斯函數,詳細的控制規則如表2所示。
2.2.2 接合壓力變化率控制
在滑摩階段,須考慮駕駛員操作意圖和離合器接合過程的沖擊度與滑摩功,用加速踏板行程變化率反映駕駛員意圖,離合器主從動盤轉速差來控制沖擊度與滑摩功。駕駛員快速踩下加速踏板表示希望迅速完成模式切換過程,應增大油壓的上升速率,反之,則減緩油壓的上升速率。若離合器主從動盤轉速差較大時,油壓上升速率應慢,以減小沖擊度;若離合器主從動盤轉速差較小,油壓上升速率應快,以減少滑摩功。因此,建立離合器壓力變化率的模糊控制規則應遵循:當油門開度變化率小且離合器主從動盤轉速差小時,離合器接合壓力變化率中等;當油門開度變化率小且離合器主從動盤轉速差大時,離合器接合壓力變化率很小;當油門開度變化率大且離合器主從動盤轉速差小時,離合器接合壓力變化率很大;當油門開度變化率大且離合器主從動盤轉速差大時,離合器接合壓力變化率中等。對此規則進行細化,可得到所有離合器接合壓力變化率的模糊控制規則。

表3 接合壓力變化率模糊控制規則表
在此過程中離合器傳遞的轉矩為
式中:R=(r23-r13)/(r22-r12),r1、r2為離合器摩擦片的內外徑,m;μ為摩擦因數;pn為控制油壓對壓盤的正壓力,Pa;S為摩擦片面積,m2;Z為摩擦副數;pn為控制油壓對壓盤的正壓力,Pa;Δω為發動機與電機轉速差。
在發動機起動時的離合器接合過程中還須對電機轉矩進行控制,其大小與需求轉矩和離合器傳遞轉矩有關。當離合器開始接合時,電機轉矩增大,其值為
在此過程中發動機開始增速,若達到其點火所需轉速時,則發動機點火,同時向發動機控制器發出相關轉矩與轉速指令。當發動機轉速與電機轉速相同時,則離合器接合完全。此時由于發動機輸出轉矩的滯后性,使用電機繼續補償發動機轉矩的不足。若發動機實際輸出轉矩為Te,與其目標轉矩存在差值為
為保證總需求轉矩平穩,利用電機進行補償,電機的實際輸出轉矩Tm與發動機轉矩關系為
式中Te_req和Tm_req為發動機和電機的目標轉矩。當發動機的轉矩差值δ進入允許范圍時,此時電機退出補償,只輸出其目標轉矩。電機起動發動機過程的控制流程如圖6所示。
3 仿真與試驗和結果分析
3.1 行進中電機起動發動機仿真
在MATLAB/Simulink仿真平臺上建立整車模型,并進行仿真。整車和關鍵部件參數如表4所示。

表4 整車及關鍵部件技術參數表
圖7為無轉矩協調控制策略時的仿真結果。當車輛運行狀態達到控制策略要求,須進行電機起動發動機時,發出限矩離合器接合指令,電機加載一特定轉矩,進行電機起動發動機過程,當發動機達到設定轉速,電機卸載。在此過程中電機轉速出現較大幅度下降,而后由于發動機轉矩和轉速的升高,電機轉速才由單向離合器帶動提升。由于本文中發動機模型采用的是實驗建模法,仿真計算時通過查表和插值得到相應數據,因而其轉速與轉矩控制較為穩定,不會產生大的波動。由圖7(a)可見,低速時汽車在6.99s發出電機起動發動機指令,發動機在7.38s達到設定轉速,起動時間為0.39s,但在電機加載與卸載時刻,產生了較大的轉矩波動,使沖擊度偏大,其最大值達到了19m/s3。由圖7(b)可見,中速時,起動時間為0.36s,沖擊度最大值則達到了25m/s3,對車輛行駛產生了較大的沖擊,影響乘坐舒適性。
圖8為采取轉矩協調控制策略后的仿真結果。由圖8可知,電機轉速在整個電機起動發動機過程中較為穩定。低速時,整車最大沖擊度為5m/s3,發動機的起動時間為0.33s;中速時,最大沖擊度為6m/s3,起動時間則為0.37s,均能較好地滿足起動要求。結果表明,該協調控制策略能有效降低行進中電機起動發動機過程的沖擊度,滿足舒適性要求。
3.2 行進中電機起動發動機臺架試驗
圖9為未使用轉矩協調控制策略的電機起動發動機臺架試驗結果。當發出電機起動發動機信號時,開始接合限矩離合器,電機在相應時刻加載特定的轉矩,由測功機模擬車輛的需求轉矩,要求在0.5s內將發動機帶到設定轉速。由圖可見,當發動機達到點火速度時,由于電機的突然卸載以及發動機轉矩的滯后,會造成合成轉矩的不足,使電機轉速下降,出現一個波谷。而發動機在起動階段,轉速不穩定,易產生波動,在單向離合器的作用下,發動機轉速不能大于電機轉速,因此發動機會帶著電機轉速也產生波動,達到最大值后下降,最后趨于平穩。低速時,系統在14.31s發出電機起動發動機指令,14.57s發動機達到設定轉速,起動時間不足0.3s;中速時此值也不足0.3s,能較好地滿足起動時間要求,在行進中可以穩定起動發動機。但在整個起動過程中,由于未對轉矩進行協調控制,產生了較大的沖擊度,低速時最大沖擊度達到28m/s3,中速時則達到了34m/s3,這會對車輛行駛造成較大沖擊,不能滿足平順性的要求,因此須進行合理控制。
圖10為采取轉矩協調控制策略后的試驗結果。由圖可見,由于進行了轉矩控制,電機轉速在電機起動發動機過程中不出現明顯的下降,但在發動機的作用下仍會產生一定的波動。低速時發動機起動時間小于0.3s,整個過程最大沖擊度為10m/s3;中速時起動時間也小于0.3s,最大沖擊度為13m/s3。起動時間均滿足要求,且較大程度地降低了電機起動發動機過程的沖擊度,驗證了該策略的有效性。
仿真與試驗結果表明,該混合動力系統在行進中能順利起動發動機,但由于未進行轉矩協調控制,使該過程產生轉矩波動,電機轉速下降較大,對車輛行駛造成較大沖擊。采用所制定的轉矩協調控制策略,能有效降低沖擊度,滿足平順性要求。
4 結論
(1)對新型的單電機、雙離合器式混合動力汽車結構和動力學模型進行分析,以發動機油耗為重點,按電機轉矩劃分了該車的工作區域,制定了驅動工況的轉矩管理策略。
(2)制定了限矩離合器油壓的模糊控制策略與轉矩協調控制策略。利用電機響應迅速的特點,協調其與整車需求轉矩、限矩離合器傳遞轉矩和發動機轉矩的關系,保證車輛正常行駛的同時順利起動發動機,不造成動力中斷或轉矩過大的波動,滿足動力傳遞的平穩性與乘坐的舒適性。
(3)對行進中電機起動發動機過程分別進行仿真和臺架試驗。結果表明,臺架試驗結果與仿真結果一致。未采用轉矩協調控制策略時,發動機起動時間滿足要求,但沖擊度偏大;采取轉矩協調控制后,發動機起動時間與沖擊度均滿足要求,改善了平順性,驗證了該控制策略的有效性。
[1] Kerem Koprubasi.Modeling and Control of a Hybrid-electric Vehicle for Drivability and Fuel Economy Improvements[D].Ohio State University,Ohio,USA,2008.
[2] 何鳳有,馬秀麗,錢苗旺,等.混合動力電動汽車核心技術分析與研究[J].電氣技術與自動化,2009,38(1):133-136.
[3] Fazal U S,Ming L K,John C,et al.Derivation and Experimental Validation of a Power-split Hybrid Electric Vehicle Model[J].IEEE Transactions on Vehicular Technology,2006,55(6):1731-1747.
[4] 王慶年,趙子亮,劉東秦,等.并聯混合動力汽車控制策略與仿真分析研究[J].機械工程學報,2005,41(12):13-18.
[5] 童毅,歐陽明高,張俊智.并聯式混合動力汽車控制算法的實時仿真研究[J].機械工程學報,2003,39(10):156-161.
[6] 侯獻軍,杜常清,顏伏伍,等.混合動力系統狀態切換技術研究[J].內然機工程,2009,30(16):72-76.
[7] Korowais K,Westervelt E R,Rizzoni G.Toward the Systematic Design of Controllers for Smooth Hybrid Electric Vehicle Mode Changes[C].The American Automatic Control Council,Proceedings of the 2007 American Control Conference,New York,AACC,2007:2985-2990.
[8] 趙治國,何守,朱陽,等.四輪驅動混合動力轎車驅動模式切換控制[J].機械工程學報,2011,41(4):100-109.
[9] 郭立書,葛安林,張泰,等.電控機械式自動變速器換檔過程控制[J].農業機械學報,2003,34(2):1-2.
[10] 古艷春,殷承良,張建武.并聯混合動力汽車轉矩協調控制策略仿真研究[J].系統仿真學報,2007,19(3):170-175.
[11] 周美蘭,謝先平,王旭東,等.汽車濕式離合器模糊控制策略研究及仿真[J].電機與控制學報,2006,9(5):414-424.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
