機動車交通道路LED路燈照明效果實測
2013-08-23 03:55:22胡英奎張青文陳仲林張晟鵬
燈與照明 2013年1期
胡英奎,張青文,陳仲林,黃 珂,張晟鵬
(1.重慶大學建筑城規學院,重慶400045;2.西南科技大學土木工程與建筑學院,綿陽621010;3.重慶市江北嘴中央商務區開發投資有限公司,重慶400024)
隨著“十城萬盞”工程的全面推進,LED光源逐漸在照明工程中得到普及應用,特別是在隧道、城市道路等室外場所得到了大量應用。雖然LED光源在工程實踐中已經得到大量應用,但我國相應的設計和測量標準還不健全,現行的城市道路照明設計標準和照明測量方法中均未對LED應用進行專門的規定。為了準確評價LED光源應用于城市道路照明的效果,筆者以某城市次干道LED光源照明效果的測量為例,探討了城市機動車交通道路LED路燈照明效果的測量方法。
1 照度測量
我國現行CJJ 45―2006《城市道路照明設計標準》規定的城市機動車交通道路中次干道的平均照度Eav維持值為低檔 10 lx、高檔 15 lx,照度均勻度UE為0.35。
GB/T 5700—2008《照明測量方法》規定道路照度測量的路段范圍:在道路縱向應為同一側兩根燈桿之間的區域;在道路橫向,當燈具采用單側布燈時,應為整條路寬,對稱布燈、中心布燈和雙側交錯布燈時,宜取二分之一的路寬。所測試的城市次干道采用對稱布燈的方式,因此測試路段選擇典型的縱向上為兩根燈桿之間的區域,橫向取二分之一路寬。
照度測量的布點方法,按照 GB/T 5700—2008《照明測量方法》的規定,當兩根燈桿間距小于50 m時,宜沿道路(直道和彎道)縱向間距10等分;當兩根燈桿間距大于50 m時,宜按每一網格邊長小于或等于5 m的等間距劃分。在道路橫向宜將每條車道三等分。所測試的城市次干道兩根燈桿間距為28 m,布點時沿道路方向每2.8 m布置測點。照度測量時采取四角布點法測量各測點的照度。照度測量布點方法如圖1所示。
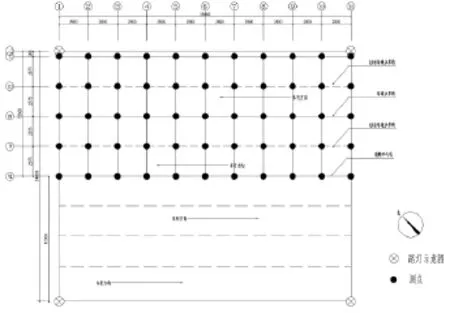
圖1 測點布點示意圖
照度測量應采用不低于一級的光照度計,對于道路的測量應采用分辨力≤0.1 lx的光照度計。本路段的照度測量儀器選用經過標定的XYI-Ⅲ型全數字照度計,該照度計的技術參數見表1。

表1 XYI-Ⅲ型全數字照度計的技術參數
經過現場實測、計算得到該測試路段路面平均照度值Eav為20.1 lx,達到了我國現行行業標準 CJJ 45—2006《城市道路照明設計標準》對次干道照度標準值的要求(該標準規定的平均照度低檔值為10 lx,高檔值為15 lx);計算得到的路面照度均勻度UE為0.62,超過了CJJ 45—2006規定的次干道路面照度均勻度0.35的標準值。
2 亮度測量
我國現行CJJ 45―2006《城市道路照明設計標準》規定的城市機動車交通道路中次干道的路面平均亮度 Lav維持值為低檔 0.75 cd/m2、高檔1.0 cd/m2,照度總均勻度UO最小值為0.4,縱向均勻度UL最小值為 0.5。
GB/T 5700—2008《照明測量方法》規定道路亮度測量的路段范圍:在道路縱向應為從一根燈桿起100 m距離以內的區域,至少應包括同一側兩根燈桿之間的區域;對于交錯布燈,應為觀測方向左側燈下開始的兩根燈桿之間的區域。所測試的城市次干道采用對稱布燈的方式,因此測試路段選擇典型的縱向上為兩根燈桿之間的區域。
亮度測量的布點方法,按照GB/T 5700—2008《照明測量方法》的規定,在道路的縱向,當兩根燈桿間距小于50 m時,通常應在兩根燈桿間等間距布置10個測點;當兩根燈桿間距大于50 m時,應按兩測點間距小于或等于5 m的原則確定測點數。在道路橫向,在每條車道橫向布置5個測點,中間一點位于車道的中心線上,兩側最外面的兩個點應分別位于距每條車道兩側邊界線的1/10車道寬處。當亮度均勻度較好或測量的準確度要求較低時,在每條車道橫向可布置3個點,其中間一點位于車道的中心線上,兩側的兩個點分別位于距每條車道兩側邊界線的1/6車道寬處。考慮所測路段的實際情況和要求,所測試的城市次干道兩根燈桿間距為28 m,布點時沿道路方向每2.8 m布置測點;在每條車道橫向可布置3個點,即采用與照度測量相同的布點方法,如圖1所示。
亮度測量應采用不低于一級的亮度計。本測量的亮度測量儀器選用經過標定的LM–3瞄點式亮度計,其主要技術參數見表2。

表2 LM-3瞄點式亮度計技術參數
根據各測點的路面亮度值可以計算得到測試路段路面平均亮度值Lav為1.86 cd/m2,達到了我國現行行業標準CJJ 45—2006《城市道路照明設計標準》對次干道亮度標準值的要求(該標準規定的平均亮度低檔值為 0.75 cd/m2,高檔值為 1.0 cd/m2);計算得到的路面亮度總均勻度UO為0.42,超過了CJJ 45—2006規定的次干道路面亮度總均勻度0.4的標準值。
3 發現距離的測量
對于LED路燈照明效果還可以利用安全停車視距法評價駕駛員對小目標物的發現距離進行測量。所謂發現距離是指駕駛員駕車時在距離小目標多遠的位置可以發現小目標。如果發現距離較短,駕駛員發現小目標后可能來不及采取必要的規避措施,可能發生交通事故。一般情況下,如果發現距離大于一個停車視距,駕駛員則有充分的時間采取規避障礙物的措施以保證交通安全。
駕駛員駕車行駛時發現路面上障礙物的距離難以直接測量,但利用iView X眼動儀可以記錄駕駛員駕車過程中的視覺行為和駕駛員觀察到的視覺環境,利用配套的視覺行為分析軟件BeGaze可以分析出駕駛員發現障礙物的時刻t1及汽車經過障礙物的時刻t2,如果還知道汽車的行駛速度v,即可利用時間與速度的乘積計算得到駕駛員發現障礙物的距離S。
由于駕駛員發現障礙物的時刻t1和汽車經過障礙物的時刻t2都可以利用視覺行為分析軟件BeGaze讀取,確定汽車行駛的速度即成為測定發現距離的關鍵。作為指導道路照明設計的駕駛員對障礙物的發現距離,應該是汽車按照道路的設計速度通過時的發現距離,所以實際測試時,只需駕駛員按照道路的設計速度通過道路即可,上述的 v也取道路的設計速度。
駕駛員駕車過程中的視覺行為和觀察到視覺場景用德國SMI公司生產的iView X HED眼動儀記錄。眼動儀系統由頭盔和一臺筆記本電腦組成,頭盔上安裝了2個攝像頭,1個攝像頭通過記錄駕駛員眼睛的數據來記錄駕駛員的視覺行為,另外1個攝像頭記錄駕駛員觀察到的場景,攝像頭記錄的數據通過數據線利用筆記本電腦的USB接口傳輸到筆記本電腦中,筆記本電腦中安裝有設備專用的數據記錄軟件。眼動儀的佩戴見圖2。

圖2 iView X眼動儀的佩戴
測試用車使用本田CR-V,測試用車車況良好,前擋風玻璃及前排車窗清潔無污染,雖有貼膜但不影響駕駛員的安全駕駛。
被測人員要求具有一定的代表性,駕駛員應對測試用車的車況及操作較熟悉。被測人員均無色盲、色弱,矯正視力均在5.0以上。
由于駕駛員對障礙物的發現距離難以直接測量,本研究采用記錄駕駛員從發現障礙物到駕車經過障礙物的時間,并根據該時間和汽車的行駛速度計算發現距離的方法間接測量發現距離。具體測試步驟如下:
1)對參加測試的駕駛員進行交底,告知他們測試的目的、測試過程中需要注意的問題,以使駕駛員了解測試的過程,消除其緊張感,使測試獲得的數據更具有代表性。駕駛員要將汽車的行車速度保持在道路的設計行車速度40 km/h。
2)駕駛員按照正常的駕駛姿勢坐在汽車駕駛座位上,戴上眼動儀頭盔,調整頭盔和頭盔上的攝像頭,使駕駛員感到舒適且攝像頭能正常工作;眼動儀操作人員坐在汽車駕駛員后面的座位上,以確保操作人員的工作不會影響駕駛員的駕駛操作;將眼動儀的數據線連接到操作人員操作的計算機上,開啟眼動儀的操作軟件對眼動儀進行調整和校正。
3)測試人員將模擬障礙物的小目標隨機地放在測試路段路面的任意位置,并確保駕駛員在駕車經過之前不知道障礙物放置的位置。
4)為確保汽車能以設計的行車速度40 km/h接近并通過障礙物,駕駛員從距測試路段200 m以外的地方啟動汽車,并盡快將汽車加速至40 km/h,保持該行車速度按照正常行車狀況駕車接近測試路段;汽車啟動后,眼動儀操作人員操作軟件開始記錄駕駛員的視覺行為;為減小測試誤差,駕駛員在駕車接近測試路段的過程中,發現路面上的障礙物后可以采取躲避障礙物的操作,但不得降低汽車的行駛速度;駕駛員駕車經過障礙物后,眼動儀操作人員停止記錄眼動儀的數據。
5)在測試過程中,每換一名駕駛員,都要進行一次眼動儀的調整和校準工作;眼動儀校準好后若頭盔在駕駛員的頭上發生了移動,也要重新進行校準。
從眼動儀記錄的數據文件中讀取駕駛員從發現障礙物到駕車經過障礙物的所經歷的時間,可以使用以下3種方法。
1)使用通用視頻處理軟件逐幀分析視頻數據。
根據駕駛員在發現障礙物前后視覺行為的明顯不同,利用通用視頻處理軟件逐幀讀取視頻圖像,可以讀出駕駛員發現障礙物的時刻t1,并能讀出駕駛員駕車通過障礙物的時刻t2,據此即可計算出駕駛員從發現障礙物到駕車通過障礙物所經歷的時間。該方法的優點是簡單易行,不需要專業的數據處理軟件即可完成;但該方法也存在明顯的缺點:駕駛員發現障礙物的時刻依靠數據處理人員的人為判斷,數據處理人員的經驗、心情等主觀因素對結果的影響較大。
2)利用BeGaze軟件的grid AOI功能處理數據。
該方法操作過程簡單,數據分析結果能以數據的形式精確表達。但該方法需要用到專業的視覺行為分析軟件BeGaze,且所用的grid AOI功能只有該軟件的專業(Professional)授權版本才具備。由于該方法主要通過分析受試者視覺關注點的變化來確定駕駛員發現路面上障礙物的時刻,如果路面上還有其他能吸引駕駛員注意力的視覺目標,則可能造成判斷駕駛員發現障礙物的時刻出錯。
3)利用BeGaze軟件的動態AOI功能處理數據。
該方法操作過程簡單,雖然也需要用到BeGaze軟件,但分析過程中用到的軟件功能是非專業(Professional)授權版本也具備的。用該方法分析數據得到的結果也能以精確數據的形式顯示出駕駛員發現障礙物的時刻。
在對各種數據處理方法的優缺點及適用性進行對比分析的基礎上,測試利用BeGaze軟件的動態AOI功能對試驗數據進行處理。數據處理結果顯示,測試路段駕駛員的對小目標的發現距離為55~67 m,遠大于40 km/h的停車視距26 m。因此,從測試數據來看,該測試路段安裝LED路燈的照明效果能保證正常行車的交通安全。
4 小結
文章通過工程實例探索了LED光源應用于城市機動車交通道路照明時的照明效果評價方法,其中照度和亮度的測量采用我國現行GB/T 5700—2008《照明測量方法》中規定的方法。在照度和亮度指標之外,提出了對小目標發現距離這一評價指標,并提出了該指標的測量方法,該指標可以直接評價照明效果對行車安全的影響,在進行照明效果評價時可以作為照度和亮度指標的補充。
[1] 科技部啟動“十城萬盞”半導體照明應用工程試點[EB/OL].(2009-05-11)[2011-12-06].http://www.gov.cn/gzdt/2009 -05/11/content_1310133.htm
[2] CJJ 45—2006城市道路照明設計標準[S].北京:中國建筑工業出版社,2006
[3] GB/T 5700—2008照明測量方法[S].北京:中國標準出版社,2008
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
汽車電器(2018年1期)2018-06-05 01:22:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
公民與法治(2016年4期)2016-05-17 04:09:26
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
