輪組式爬樓機器人的設計與實現
2013-08-23 08:34:02李正中張青松董培武
制造業自動化 2013年17期
李正中,張青松,鄧 翱,盧 陽,董培武
LI Zheng-zhong, ZHANG Qing-song, DENG Ao, LU Yang, DONG Pei-wu
(重慶科技學院 自動化系,重慶 401331)
1 爬樓機器人結構
現有輪式機器人具有較好的水平移動能力,但其越障性能較差,難以滿足現場工作的復雜環境要求。為了使爬樓機器人能自主探知障礙,并調整運動狀態,其硬件系統應包括以下功能模塊:主控模塊、驅動模塊、障礙檢測模塊、電源模塊等。爬樓機器人控制系統結構圖如圖1所示。本系統以STC89C52單片機為控制核心,通過紅外傳感器探測爬樓機器人周圍有無障礙以及車體離障礙的距離等信息,經CPU處理后產生行進控制信號和爬樓控制信號,分別實現直流電機的行進PWM調速控制和步進電機的爬樓越障控制[1,2]。
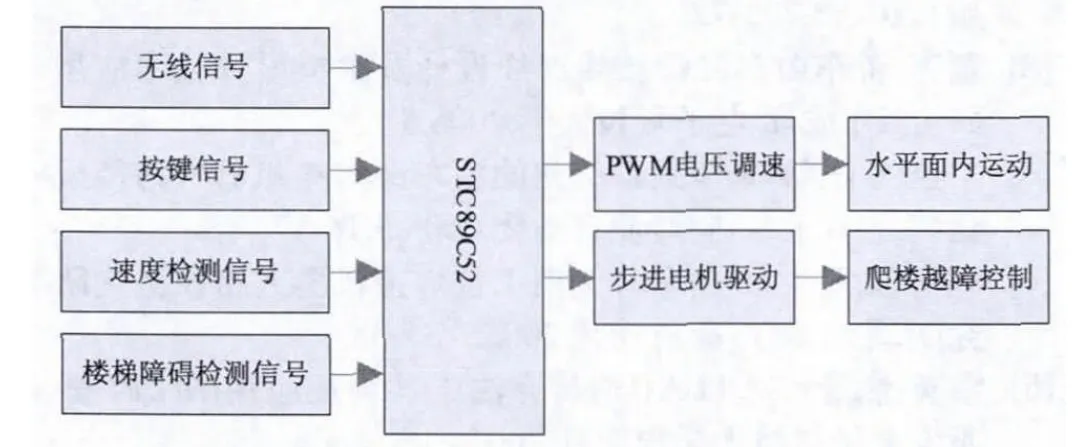
圖1 爬樓機器人系統結構圖
2 爬樓機器人的硬件設計
2.1 系統結構設計
輪組式爬樓機器人的整體結構由兩部份組成,包括位于機器人中問部位由兩個輪組驅動的主車架,及輪組機構。主車架由一根車軸及輔助支撐部分組成。機器人的控制部分固定于主車軸四周的支撐機構上,移動時和主軸一起同步旋轉。輪組結構由兩個雙層的”Y”型鋁制支架構成,三個等長的輪輻互成120o夾角,如圖2所示。主軸和用于越障的步進電機分別位于固定于輪輻的交點的內外側。車輪的傳動部分位于各輪輻的端點處,由大減速比的直流電機直接驅動輪子運動。從而通過輪組的翻轉與步進電機的配合實現機器人水平運動及爬樓動作。
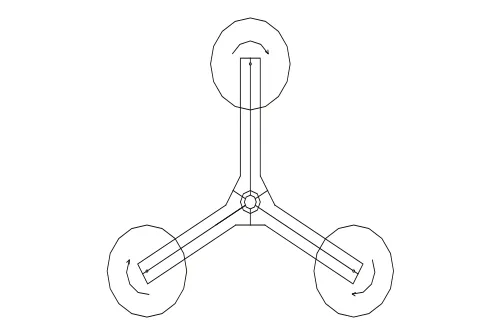
圖2 輪組結構示意圖
2.2 控制電路設計
該電路采用STC89C52單片機作為控制芯片,各控制部分使用模塊化的設計結構。為了提高整個系統的可靠性,其輸入部分采用無線輸入控制與鍵盤輸入控制兩種形式相結合的方式。
2.3 電機驅動電路設計
本機器人輪輻處使用直流減速電機,采用集成芯片L298來驅動左右兩組直流減速電機。L298驅動電路原理圖如圖3所示。其中,控制器產生的兩路PWM信號分別接于L298的ENA和ENB引腳,用于調節電機的轉速。同時IN1、IN2、IN3、IN4端口是L298邏輯控制端口,通過IN1到IN4電平的高低不同控制OUT1、OUT2電機的動作。

圖3 直流電機驅動電路圖
為了增大機器人樓爬越障時的力矩,提高其越障的成功率。因此輪組軸心處采用步進電機實現爬樓及越障功能。所用步進電機為四相步進電機,采用單極性直流電源供電。對步進電機的各相繞組按合適的時序通電,使步進電機步進轉動。通過控制驅動模塊ULN2003芯片10~13引腳電平的高低變化,控制CON1輸出端口的通電時序來實現步進電機正傳、反轉和轉動角度。步進電機驅動器原理圖如圖4所示。
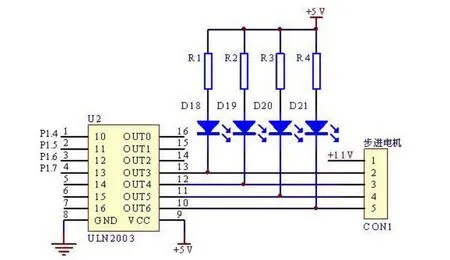
圖4 步進電機驅動電路圖
2.4 無線控制電路設計
爬樓機器人運動過程中可接受按鍵信號和無線信號,用以控制直流、步進電機正反轉,實現機器人在水平面的直線、轉彎等運動以及爬樓越障等動作。該無線信號控制模塊采用NRF24L01模塊,該模塊可工作于2.4 GHz~2.5 GHz ISM頻段,內置頻率合成器、功率放大器、晶體振蕩器、調制器等功能模塊,其中輸出功率和通信頻道可通過程序進行配置。無線控制模塊接線圖如圖5所示。
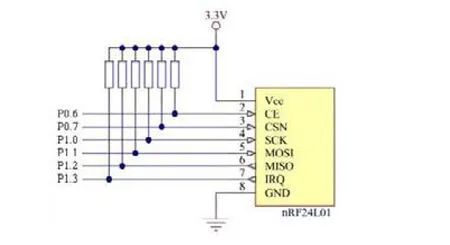
圖5 無線控制電路圖
2.5 傳感器電路
樓梯檢測采用紅外測距傳感器模塊,用以實現機器人自主檢測障礙、翻越障礙的能力。紅外測距模塊利用紅外對管發射與接收紅外線,判斷機器人與障礙物之間的間距,為機器人下一步的運動方式提供依據[3,4]。采用霍爾傳感器可實現測速功能,將檢測到的數據傳送到單片機經校正算法處理后輸出校正信號。為了減少傳感器之間的相互干擾,傳感器的打開與關閉用處理器控制,確保不出現兩個以上傳感器同時打開的情況,消除相互干擾。紅外測距及測速電路接線圖如圖6所示。

圖6 測距及測速電路圖
2.6 電源電路設計
電源的設計采用了電池組和電壓轉換電路來實現不同元器件對電壓的要求。處理器、傳感器、運放處理電路、電機驅動芯片供電均采用5V供電,而對于電機則直接用可充電鋰電池組供電,電機兩端最大電壓可以達到11V,在電機的承受范圍內,并且能夠提高電機的最大轉速。電源部分的電路如圖7所示。
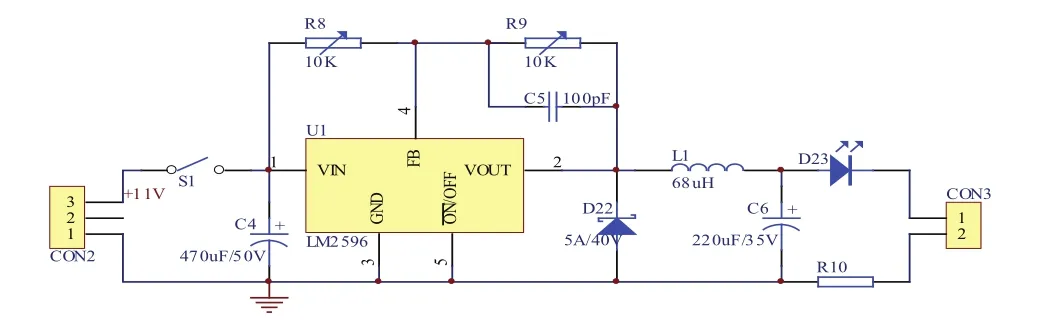
圖7 電源模塊
3 爬樓機器人的軟件設計
根據爬樓機器人運動軌跡和控制要求,系統的控制程序要包括控制主程序、樓梯檢測子程序和爬樓子程序等。主程序流程圖如圖8所示。運動控制主程序完成運動過程處理、數據信息采集與處理,樓梯檢測子程序通過紅外測距系統實現樓梯的識別,并調用爬樓子程序完成機器人的爬樓運行過程,其流程圖如圖9所示。
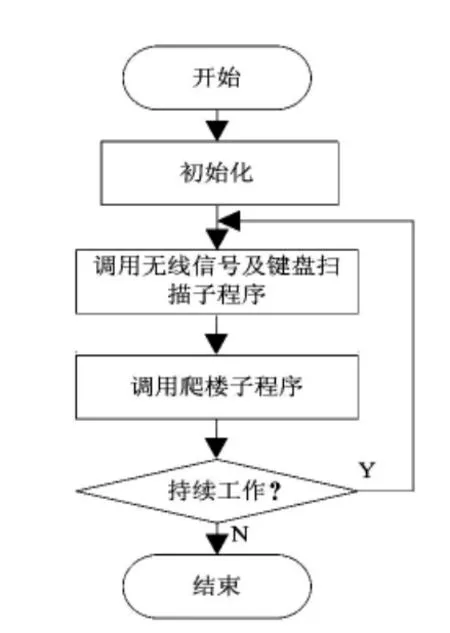
圖8 控制系統主程序
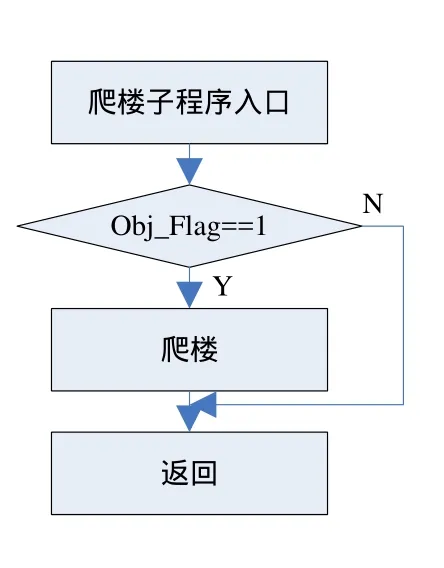
圖9 爬樓控制子程序
4 結束語
完成設計之后,對爬樓機器人進行了整體測試和實驗,結果顯示基本達到預期效果。在機器人正常行駛過程中,固定在Y型支架頂端的直流電動機在PWM技術控制下實現機器人的變速行走。若前方有樓梯則控制固定在Y型支架中心軸上的步進電機,使Y型支架旋轉一個角度,從而實現了機器人的爬樓運行。同時這種結構模式也能實現機器人翻越各種類型障礙物,適合在各種不規則區域行走。具有較強的實際應用價值。
[1]李菊葉.小型機器人避障的設計與實現[J].北華大學學報(自然科學版),2012.13(2).
[2]殷春武.主從履帶復合式機器人越障研究[J].計算機工程,2012.38(23).
[3]雷艷敏,朱齊丹,等.基于激光測距儀的障礙物檢測的仿真研究[J].計算機工程與設計,2012.33(2).
[4]丁偉,李海波.一種移動機器人避障與追蹤技術研究[J].制造業自動化,2012.34.
