基于W-空間的彈藥裝填機器人避障路徑規劃
2013-08-22 07:34:28蘇忠亭
制造業自動化 2013年1期
徐 達,夏 祥,蘇忠亭
(裝甲兵工程學院 兵器工程系,北京 100072)
0 引言
避障路徑規劃是指在給定的障礙條件以及起始和目標的位姿,選擇一條從起始點到達目標點的路徑,使運動物體能安全、無碰撞地通過所有的障礙[1]。近年來,在機器人避障路徑規劃方法研究中,國內外許多學者做了大量工作,根據不同規劃空間可分為兩種:機器人W-空間(Working Space)規劃[2,3]和C-空間(Configuration Space)規劃[2,3]。由于在C-空間中障礙物映射表述不夠完整,自由空間計算難度較大,運動路徑不易確定,有效性不高的缺點,本文針對彈藥裝填機器人作業環境特殊、運動控制需實時可靠的要求,提出了一種基于工作空間的彈藥裝填機器人避障路徑規劃算法。該算法首先對規劃路徑進行離散化,運用圓弧對避障路徑進行插補,同時運用樣條函數在關節空間進行第二次插補,最后進行了仿真計算,結果表明,該算法運算簡單,能有效滿足彈藥裝填機器人的避障要求,保證彈藥裝填機器人連續和平穩作業。
1 彈藥裝填機器人運動構型與作業環境表述
1.1 彈藥裝填機器人運動構型
彈藥裝填機器人屬于關節型機器人,擁有PRRR-S型結構,其中,P為移動副,R為轉動副,S為球面關節[4],由D-H法則建立彈藥裝填機器人連桿坐標系,其結構簡圖與連桿坐標系如圖1所示,其中l1、l2為彈藥裝填機器人大臂和小臂的長度。機器人PRRR關節用來確定末端執行器的空間位置,S關節用來確定末端執行器的空間姿態。
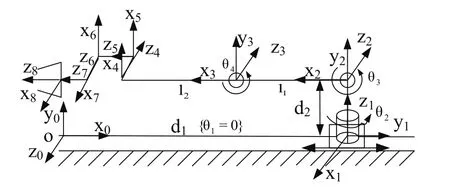
圖1 彈藥裝填機器人結構及連桿坐標系圖
1.2 作業環境概述
作業環境分析是進行避障路徑規劃的基礎。彈藥裝填機器人的作業環境主要是指裝甲車輛的車內環境,由于坦克、自行火炮車內空間狹窄、結構復雜,且作業過程車體顛簸振動幅度較大,與工業機器人相比,彈藥裝填機器人作業環境表現為狹窄、封閉、多障礙的特點,如炮塔中的炮尾,在訓練與射擊過程中,隨著炮塔俯仰而不斷變化,在W-空間中具有幾何不規則性,因此需對其進行一定簡化。本文采用球形包圍盒法對其進行簡化與建模,同時將末端執行器、機械臂的大小、形狀因素考慮進去,得到最終簡化模型如圖2所示。其中為考慮機械臂寬度后球體包圍盒當量半徑,為包容盒球體的半徑,d為機械臂最大寬度。
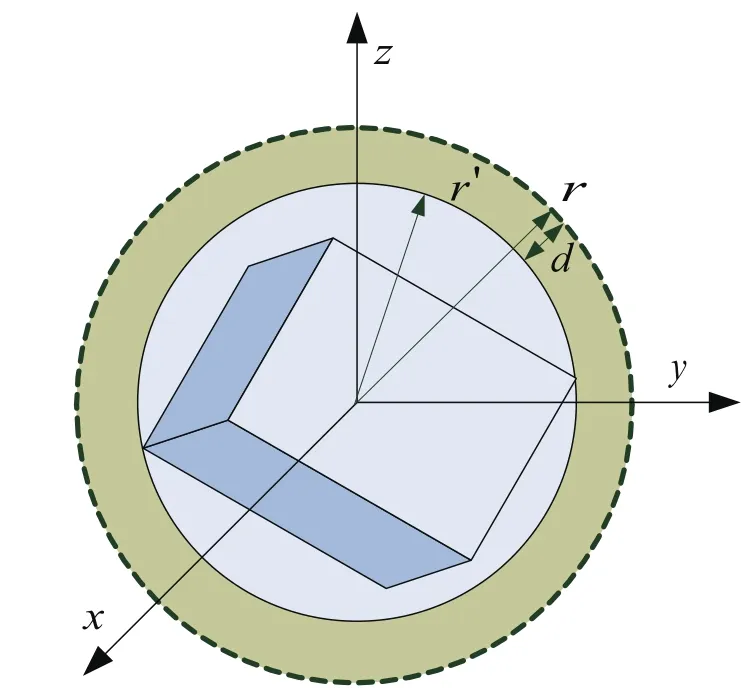
圖2 障礙物包圍盒示意圖
2 避障路徑規劃
2.1 避障路徑設計
建立當量包圍盒后,障礙物幾何中心即已知,設圓心坐標為 O (x0,y0,z0),彈藥裝填機器人末端執行器參考點坐標為 P ( px, py, pz),當式(1)成立時,彈藥裝填機器人即與障礙物發生碰撞,此可作為彈藥裝填機器人避碰判定式。

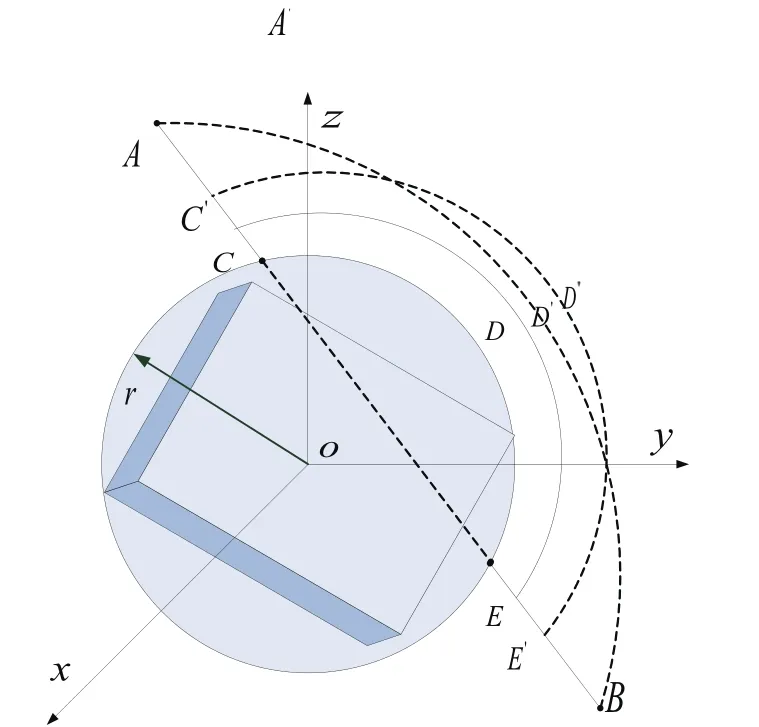
圖3 彈藥裝填機器人避障路徑示意圖
由于空間曲線基本可以分割為多段直線或圓弧的組合,因此在機器人W-空間路徑規劃過程中,通常采用空間直線和空間圓弧兩種基本曲線。
如圖3所示,設障礙物圓心為o,半徑為r,彈藥裝填機器人末端執行器運動起始點為A,目標點為B。在點A與點B之間利用空間直線與空間圓弧進行規劃。避障規劃過程中,路徑有多種選擇,即空間曲線ACDEB、空間曲線和空間曲線等。根據路徑最短和機器人末端執行器可達空間最大化原則,選取空間圓弧ADB作為避障過程路徑,其中D點由末端執行器和障礙物的空間尺寸及避碰安全系數決定。
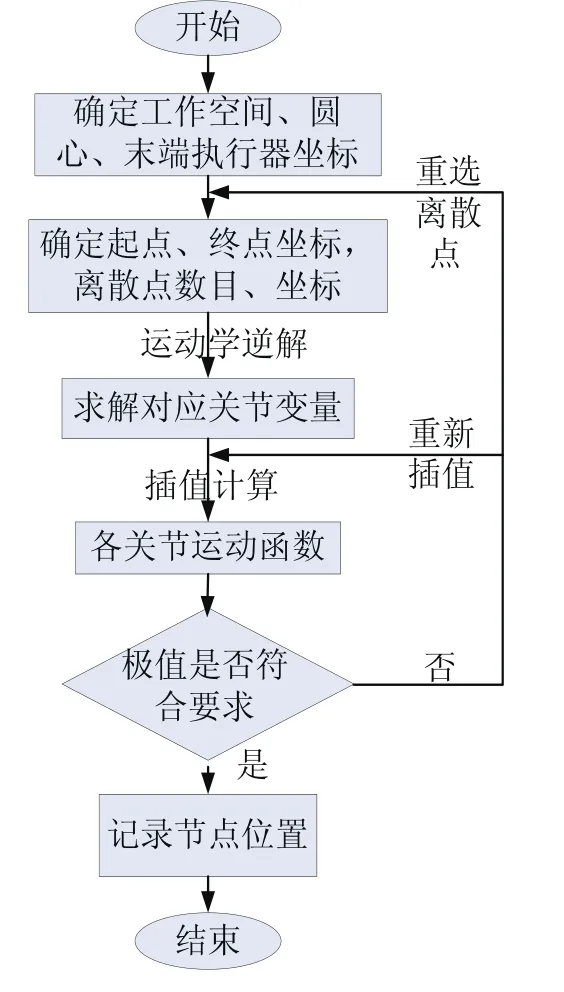
圖4 障礙物包圍盒示意圖
2.2 避障算法步驟與流程
根據式(1)及選取的路徑ADB,可設計彈藥裝填機器人避障步驟,流程如圖4所示。具體如下:
1)確定彈藥裝填機器人工作空間,求解障礙物中心與末端執行器空間坐標;
2)將空間圓弧ADB離散化若干控制點,確定避障路徑起點與終點;
3)運用運動學逆解求得起點、終點與離散控制點對應各關節變量;
4)對步驟3中所得關節變量進行二次插值,得到各關節運動函數;
5)取各關節運動函
數極值對應點,進行運動學正解,利用式(1)判斷是否與障礙物相碰,檢驗二次插值精度和離散點數目是否符合要求;
6)利用符合要求的關節運動函數驅動控制電機,實現彈藥裝填機器人避障路徑。
2.3 空間圓弧插補
對于彈藥裝填機器人工作空間路徑規劃,由于作業環境的特殊性,只考慮位置變化。設給定的三個點位置分別為,如圖5所示,由此確定平面M,方程為:
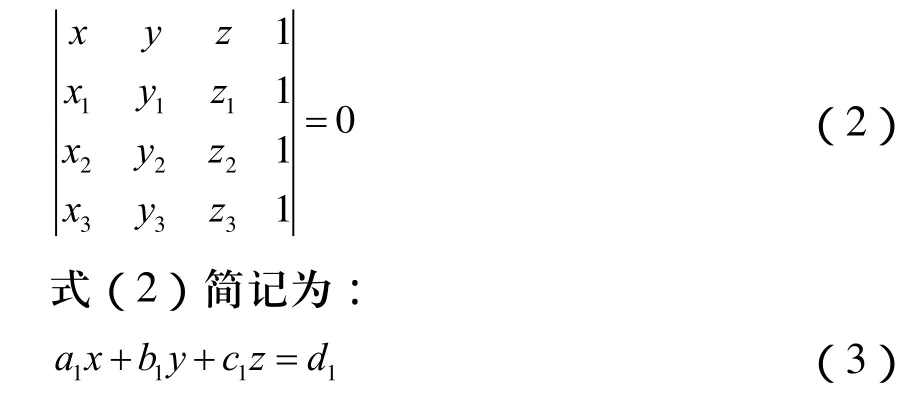
其中:1a,1b,1c,1d分別為式(2)中關于x,y,z,1的余子式。
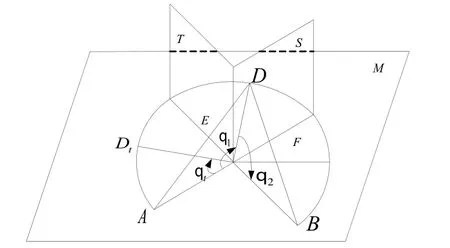
圖5 彈藥裝填機器人空間圓弧路徑示意圖
過AD的中點E并垂直于AD,可以唯一確定一個平面T,則該平面上的任何直線均垂直于AD,從而得平面T的方程為:
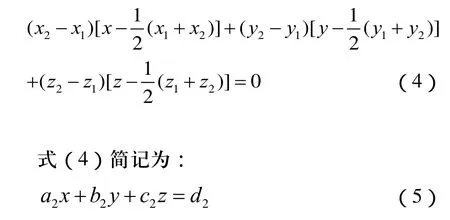
同理,過DB中點并垂直于DB的平面S的方程可寫為:

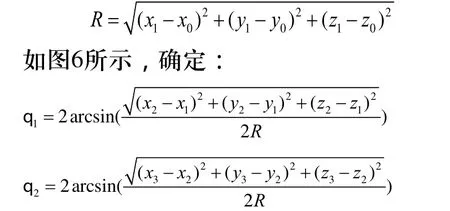
設彈藥裝填機器人末端執行器沿圓弧勻速運動,運動時間為ft,得圓弧上任意時刻t點的位置坐標為:
3 避障路徑仿真與分析
根據第三節設計的路徑以及算法步驟,采用空間圓弧進行插補,得到彈藥裝填機器人末端執行器軌跡如圖6所示,其運動速度與圓弧插補速度相關,當圓弧插補為勻速時,其末端執行器在x、y、z方向速度矢量如圖7所示。
從圖6可知,末端執行器空間軌跡與所規劃曲線吻合,符合彈藥裝填機器人供彈過程避障要求,從圖7可知,其各個軸向速度曲線具有單調性,速度變量在約束條件內,各軸最大速度滿足彈藥裝填機器人綜合特性,末端執行器各軸速度曲線變化平滑和連續,這表明彈藥裝填機器人末端執行器在避障過程中不會產生振動,能夠保證作業中平穩控制與運動。

圖6 彈藥裝填機器人末端執行器空間軌跡
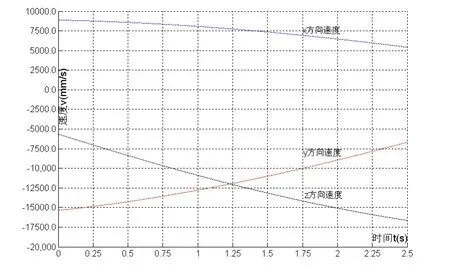
圖7 末端執行器各軸速度曲線
4 結束語
本文以彈藥裝填機器人為對象,從最短路徑與易控制性能角度出發,研究了彈藥裝填機器人作業過程中的避障問題。在分析了彈藥裝填機器人工作環境與障礙物特性基礎上,提出了一種基于W-空間圓弧插補的避障軌跡方法,并規劃了該算法的步驟與流程,具體給出了該算法的實現過程,并對所研究的算法進行了仿真與分析,結果表明:該算法運算簡單,能有效滿足彈藥裝填機器人的避障要求,保證彈藥裝填機器人末端執行器按照預設路徑進行運動,且滿足各個軸向速度、加速度連續平穩的要求。
[1] 施琴,馬履中,劉翊,王君雄.六自由度機器人避障問題的MATLAB仿真[J].機床與液壓,2010,38(9):89-91.
[2] 孫樹棟.工業機器人技術基礎[M].西安:西北工業大學出版社,2006(5):92-119.
[3] 戈志勇.番茄采摘機械手運動學仿真與避障算法研究[D].江蘇大學,2007.
[4] 徐達,王中盛,劉廣洋,等.基于串并聯結構的彈藥裝填機器人設計[J].裝甲兵工程學院學報,2008,22(5):45-50.
[5] 徐達,帥元,郝琢,侯潤峰.彈藥裝填機器人自適應PD控制算法[J].裝甲兵工程學院學報,2011,25(1):49-53.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
公民與法治(2020年11期)2020-07-25 02:02:06
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
