艦船水下維修現狀及發展趨勢
2013-08-21 13:28:38朱曉軍閔少松
中國修船 2013年3期
朱曉軍,閔少松,張 濤
(海軍工程大學,湖北武漢 430033)
通常情況下,艦船水下部分維修需到具有與艦船噸位和尺度相當的塢中或排上進行,由于進出塢和上下排前艦船都需要一定的準備時間,因此,艦船塢 (排)修一般都需要一個較長的周期,這是導致艦船實際在航率偏低和維修費用偏高的一個重要原因[1]。水下維修能在一定程度上緩解艦船水下部分維修需求對塢排設施的依賴,使其在不進塢而恢復原有的技術狀態。水下維修指在水中對艦船設備或結構進行清洗、檢測和修理更換的一種維修活動。本文主要介紹水下維修的國內外水下維修的現狀以及水下維修技術的發展趨勢等內容。
1 國內外水下維修現狀
長期以來,國內外對艦船的水下維修進行著不懈的研究探索,取得了長足的進步和較大的突破。從肉眼進行水下檢測發展到運用光、聲、電等儀器設備進行水下檢測,如水下攝像檢測、水下超聲波測厚和水下磁粉探傷等;從潛水員實施水下維修操作發展到利用水下維修平臺和水下遙控機器人等裝置實施水下維修的操作。下面簡要敘述國內外水下維修技術應用的現狀、水下修理的應用范圍及其帶來的經濟效益。
1.1 國外水下維修現狀
美國海軍一直非常重視艦船的水下維修,設有專業的水下維修機構,專門負責艦船的水下維修(艦船清洗和修理),還設有專門的水下維修研究機構,以開展艦船水下維修技術的研究和水下維修人員的技術培訓等。從美海軍水下維修的作業方式來看,其水下維修主要依賴2種平臺:水下維修艙和水下維修機器人平臺。美國海軍的幾個修船廠都存儲有大量針對不同類型艦船和同一型艦船不同水下部位的修理艙 (又稱為修理潛水箱、沉箱),圖1為一個維修船體的水下維修艙實圖及示意圖,維修艙與船體貼緊后排水,在水下形成一個局部的干式維修空間,進行相應部位的維修作業,包括船體維修和鋼板及構架的更換,推進器、艉軸管、舵、減搖鰭的修理更換,聲吶導流罩的維修等等。

圖1 美國海軍用于艦船船體維修的水下維修艙
利用水下維修艙實施維修,可對船體水下局部區域進行較快的檢測、清洗、修理和更換,然而,對于船底大面積的污底清洗,則因船體型線不同而需經常更換維修艙,清洗效率較低,需要專門的清洗裝置來實施污底清洗。為了提高清洗工作的效率,美軍一直致力于高效污底清洗裝置的研究研制,其清洗裝置的發展大致經歷了3個階段[2]:手工操持階段、機械操持階段和遙控機械或機器人自主作業階段。第一種方式基本是由潛水員手持轉刷,利用操作人員施加外力及轉刷產生的負壓使之緊貼船體,對船底污底進行清洗;第二種方式利用各種噴射式清刷裝置如高壓水噴射裝置進行污底清洗;第三種方式利用機器人的吸附和移動功能,使用機器人本體上攜帶的高壓水槍、轉刷等進行清洗作業。第三種裝置的清洗效率最高,是美軍重點研究和發展的方向,如美國海軍水面艦船中心成功研制的自動水下船體清洗維修車[3]就屬于這種類型,該裝置由水面操作控制,無需潛水員,進行污底清刷工作主要依賴旋轉刷、高壓水槍和聲震動3種方式;該平臺上還裝有涂層厚度探測器和電位的探測器等傳感器,配備的攝像機可以拍攝水下靜態照片和錄像,這些傳感和攝像設備可以進行艦船檢查和輔助維修計劃的制定。
英國的水下維修國際公司 (UMC)一直從事艦船的水下檢測維護和修理,是全球水下維修技術的領先者,是美國、英國、澳大利亞、法國和意大利等國家海軍艦船水下維護服務的提供商和水下檢測、維修設備的供應商。UMC能夠在水下更換修理艦船大多數水下設備,圖2是UMC公司為英國海軍更換修理穩定翼。
比利時Hydrex公司是向船主提供廣泛的水下清洗和維修服務的領頭國際公司之一,它的理念是干船塢并非船舶修理的必須設施,許多船體的清洗和維修工作可以在原位完成;該公司的服務包括船舶外部水下設備和機器的大修和更換,推進器、螺旋槳、舵、軸管套、破損和腐蝕船體等其它外部設備的水下清理工作由其專業團隊完成;工作方式主要由潛水員在水下操縱各種工具進行維修或清理,屬于人工半自動性質。該公司開發了一種名叫WPS的焊條,實現了水下濕式焊接焊縫質量的突破,圖3所示為Hydrex焊工正在進行水下焊接修理。另外,Hydrex公司通過制造一個水下干燥環境進行推進器的修理和更換工作,類似于美軍的水下維修艙。Hydrex公司的水下船體清理系統利用各種液壓驅動設備去清除船體污底,同時避免破壞船體上的涂層,其清刷裝置配備有3個刷頭和使機器貼在船體上的可調控的壓力系統 (見圖4),該裝置每小時可清刷約800 m2船體。

圖2 水下更換修理穩定翼
圖3 水下濕式焊接

圖4 Hydrex公司的清刷機器
另外,日本、法國和丹麥等均對水下維修技術進行了深入的研究和探索,他們都致力于船舶水下部分的高效檢測、清洗和修理更換的研究工作。
可以看出,目前國外對艦船實施水下維修作業主要有3種方式:水下濕式維修作業、制造水下局部干空間實施維修作業和利用水下機器人平臺實施維修作業。在這3種方式下,目前能完成的水下維修作業如表1所示。從表1可以看出,艦船在干船塢中的大部分工作都能被水下維修所代替,為延長艦船進塢修理間隔提供了基礎,如上世紀90年代,美軍艦船進塢修理間隔從3年延長到5年以上,顯著提高了其艦船的在航率。
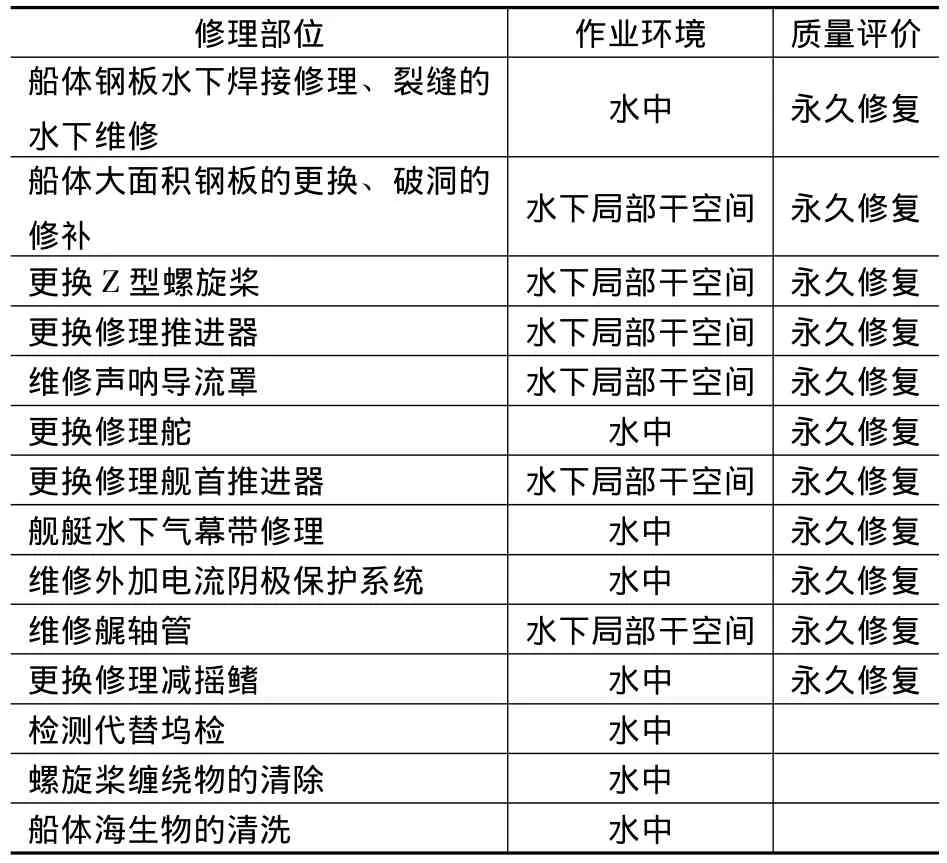
表1 國外艦船水下維修的范圍、作業環境及修理質量
另外,在海上或在靠碼頭情況下對艦船實施水下維修,與在干船塢里修理相比更為經濟。表2是1992年6月美國海軍時報所刊“水下維修與干船塢修理費用對比表”,可以看出,使用水下維修具有重大的經濟意義。
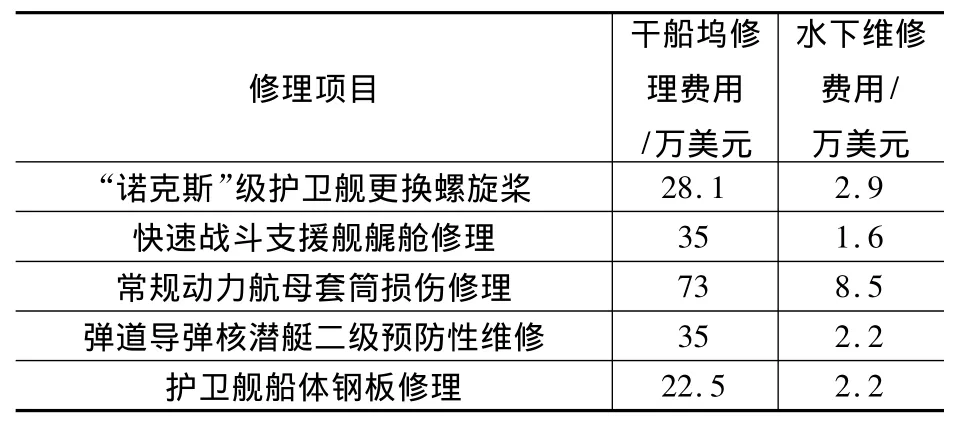
表2 水下維修與干船塢修理費用對比表
1.2 國內水下維修現狀
受效益最大化思想的推動,國內民用船舶行業中水下清洗技術發展較快。我國沿海地區在最近幾年內相繼成立了多家水下工程服務公司,水下維修人員都有交通部頒發的潛水員證書。“船舶水下工程檢測維修”許可證書。有的企業還獲得美國、挪威、法國等船級社的認證。這些公司的業務包括水下觀察、檢測、清洗和簡單的修理,能夠對船舶進行水下船體海生物的清理,水下電焊搶修,海底門、艉軸管、排水口的水下封堵、螺旋槳纏繞物水下清除、水下攝影錄像、船體探傷、船舶水下檢驗等作業。
目前國內的水下維修公司大多采用進口設備,采用人工半自動操作方式,而國內船體污底清洗機器人裝置還處于樣機研究階段,如哈爾濱工程大學研制的水下船體清刷機器人樣機[4]。該機器人用于清洗水下部分船體表面附著的貝類和藻類生物等,它通過永磁體雙履帶吸附在船體表面,機器人既可自主作業,又可進行人工操控作業,但這類清洗裝置的吸附履帶在船底曲率變化較大區域的作業能力還有待進一步提升。
總的來說,目前國內民用水下維修技術主要應用于民用船舶和海洋結構物的維修,在軍用艦船的水下維修中應用較少。軍用艦船同民用船舶相比,船底型線更加復雜、水下附屬裝置檢修時的安全要求更高。因此,軍用艦船的水下維修是一個較民船水下維修更為復雜的活動,需要綜合考慮船體型線及結構的特點、水下維修對水線以下附屬裝置及船體的影響、船體及水線以下附屬裝置技術性能要求對水下維修的要求,尚需進行有針對性的修理方案研究和樣機研制。
2 水下維修發展趨勢及關鍵技術
水下濕式焊接通常被用于應急搶修,用于緊急情況下水下船體的裂縫和小面積破損船體的修復,對于水下作業人員和水下焊接裝置及焊材的要求較高。為了降低維修作業的門檻和提高維修作業的效率,未來,對于水下船體大面積的換板修理和水下裝置的修理更換將會更多地采用水下維修艙實施;而對于水線以下的污底清洗和大面積的船體外板狀態檢測將會采用水下維修機器人平臺實施。對于水下維修艙和水下維修機器人平臺,國外已經逐步應用并在繼續進行深入探索,對我軍而言,目前還處于起步階段。因此,我國海軍未來艦船水下維修發展的重點將會是水下維修艙和水下維修多功能機器人平臺的研究研制。
2.1 水下維修艙發展趨勢及關鍵技術
根據美軍水下維修艙的特點可知,對于某一維修艙而言,通常只能附著于某一特定艦型的某一特定區域。因此,海軍若想對現役艦船實施水下維修,必須制造大量的水下維修艙,如果對一艘艦船進行一次從艏至艉的水下維修,則會用到許多水下維修艙,如果艦船遠離岸基,則可以想象這種水下維修的開展是相當困難的。因此,今后水下維修艙的發展趨勢將會是增加其對艦船外形的適應性,研制自適應艦船型線的水下維修艙,盡量減少一條艦船所需水下維修艙的數量,這就需要對現役艦船的型線進行分析和歸類,研究水下維修艙同艦船附著邊沿自適應的設計方案。另外,水下維修艙附著力獲取方式的研究也是十分重要,還要研究在遠離岸基且有風浪影響情況下水下維修艙附著的穩定性。
2.2 水下維修機器人平臺的發展趨勢及關鍵技術
艦船水下維修機器人平臺的主要工作任務是船體污底清洗和船體外板及各種水下附屬裝置的性能檢測。美軍雖已設計出自動水下船體清洗維修車,但是該平臺的設計方案和應用卻鮮見報道,我軍要研制出這類水下作業平臺還需靠自身努力,因而有許多關鍵技術需要解決,主要包括平臺吸附、平臺貼船體運動的路徑規劃、污底清洗、船體外板檢測勘驗、附屬裝置檢測和模塊化設計、平臺的水下的姿態控制、檢測數據傳輸和處理等多項關鍵技術。這里僅敘述艦船水下維修機器人平臺對吸附技術和模塊化技術的要求。
1)平臺吸附技術。水下維修機器人平臺在水下的運動方式主要有2種:船體附近自由運動和水下船體的爬壁運動,其中平臺的水下船體爬壁運動最為復雜,涉及到平臺的吸附技術。總體來看,爬壁機器人吸附方式有負壓吸附、真空吸附、磁吸附、推力吸附等幾類[5]。負壓及真空吸附方式具有不受壁面材料限制、適用范圍廣等特點。但當壁面凹凸不平時,吸盤容易發生氣體泄漏,導致吸附力不足,減小爬壁機器人的承載能力,甚至使爬壁機器人從壁面跌落;磁吸附有永磁和電磁兩種方式,但要求壁面必須是導磁材料,產生的吸附力遠大于負壓和真空吸附,也不存在漏氣現象,對凹凸不平壁面的適應性較強;推力吸附法是一種新型的吸附方式,與真空吸附和磁吸附相比,在壁面移動機器人的載體方面有了很大的創新。它不是依靠吸力而是使用螺旋槳產生合適的推力,使機器人穩定可靠地吸附在壁面上。由于推力能始終指向壁面,機器人可容易地實現越障而適應于各種情況的壁面。
由于船體水下部分尤其是尾部水下部分曲率變化較大,采用負壓及真空吸附法不太合適,而采用磁吸附又有可能會引起艦船結構及設備的磁化,另外,磁力吸附要求機器人始終貼緊船體才能運動,機器人從船體一點運動到另一點開始工作時,由于磁力機器人移動較慢,因而影響工作效率。而推力吸附技術因為其對壁面適應性強、不會產生磁化影響和運動速度快將是未來水下維修機器人的發展方向。如前所述,推力吸附技術主要采用螺旋槳產生合適的推力來使機器人本體貼近船體壁面,因此,螺旋槳在機械本體上的布置以及其功率的選擇是關鍵,需充分考慮機械本體上功能部件如清洗轉刷工作時所產生的反作用力、波浪沖擊力和機械本體自身重力等因素的影響,需要經過深入研究分析和試驗方能確定。
2)模塊化設計技術[6]。未來水下維修機器人平臺將承擔多種維修任務,不同的任務可能需要不同的功能部件,若將所有的功能部件都安裝在平臺上,勢必會增加平臺的自重和尺寸,給平臺的吸附、運動控制和準確定位都會帶來不利的影響。因此,將功能部件按照模塊化的思路進行設計將是未來水下維修平臺的一個發展趨勢,執行任務前,根據不同的任務需求安裝不同的功能模塊,不僅可以減少自重、增加運動的可控性,還能提高工作的效率和準確性。因此,模塊化設計技術將是未來水下維修機器人平臺的關鍵技術之一,需要綜合考慮各種模塊的物理接口和數據傳輸接口等要求。
3 水下維修推廣應用前景
水下維修具有如下推廣應用前景。
1)為船體水下維修方案的制定提供依據。利用水下維修機器人平臺進行船體檢測勘驗,根據檢測結果確定船體污底水下清洗的時機和清洗設備,確定船體水下附屬裝置及船體應采用的修理手段,做到維修工作有的放矢,維修設備做到“對癥取材”,提高維修質量,節約維修時間和維修經費。
2)為維修方式的改革提供基礎。通過水下維修機器人平臺進行無損檢測,掌握艦船水下部分的技術狀態,有針對性地展開維修,實現由“定時維修”向“視情維修”和“以可靠性為中心的維修”轉變[7]。如通過水下檢測掌握船體水下部分的強度、腐蝕情況、犧牲陽極等裝置的技術狀態等,并根據檢測結果確定是否需要修補或應該采取的維修方式等。
3)為延長進塢修理間隔時間提供保障。目前國外發達國家海軍水下維修基本可以完成船體污底清洗、船體水下檢測、水下部件修理更換等需要干船塢的維修工作,因此,這些國家艦船的進塢修理間隔時間就相對較長,如美軍核動力航母的進塢修理間隔從以前的5年左右延長到了現在的9年左右,水下維修便是這一間隔延長的重要保障之一,隨著塢修間隔的延長,其航母的在航率也相應提高,因而在其航母總數不斷減少的情況下,航母仍能滿足其國家戰略的使用需求。所以,若在我海軍大力發展水下維修,則會減少艦船全壽命周期內的廠修時間,提高艦船的在航率。
4 結束語
水下維修指在水中對艦船設備或結構進行清洗、檢測和修理更換的一種維修活動,目前艦船實施水下維修主要有3種方式:水下濕式維修作業、制造水下局部干空間實施維修作業和利用水下機器人平臺實施維修作業,后2種方式是未來水下維修的主要發展方向,其中水下維修艙將來會逐漸向對船體型表面適應性強的方向發展,而水下清洗裝置將會逐漸向清洗與檢測勘驗集成的多功能水下維修機器人平臺發展。
對艦船實施水下維修可以代替塢修中的許多工作,能在確保裝備技術狀態完好的前提下延長塢修間隔,從而提高艦船的在航率和節約維修經費,具有重要的軍事和經濟意義。
[1]朱志潔,朱曉軍,王政.破損艦船進塢過程虛擬仿真研究 [J].船海工程,2007,36(2):87-89.
[2]酈智斌,龍彪.船舶水下清洗技術研究 [J].中國修船,2011,24(5):33-36.
[3]任達生.新型遙控船體水下清洗裝置 [J].中國修船,1999(6):10.
[4]孟慶鑫,王麗慧,王立權.水下船體表面清刷機器人方案研究 [J].船舶工程,2002(1):44-46.
[5]王麗慧.水下船體表面清刷機器人及相關技術研究[D].哈爾濱:哈爾濱工程大學,2002.
[6]季東軍.模塊化水下機器人及其故障診斷研究 [D].哈爾濱:哈爾濱工程大學,2008.
[7]王小偉,張文瑤.無損檢測技術及其在艦船水下維修中的應用 [J].中國修船,2004(1):41-42.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
