基于螢火蟲算法優(yōu)化BP神經網絡的目標威脅估計
2013-08-16 13:50:06王改革郭立紅王鶴淇
吉林大學學報(工學版) 2013年4期
王改革,郭立紅,段 紅,劉 邏,王鶴淇
(1.中國科學院 長春光學精密機械與物理研究所,長春 130033;2.中國科學院 研究生大學,北京 100039;3.東北師范大學 計算機科學與信息技術學院,長春 130117)
0 引 言
隨著科學技術的發(fā)展,現(xiàn)代戰(zhàn)爭已經進入信息化時代,為適應該變化,早在20世紀70年代,美國就開始了多傳感器信息融合的研究。目標威脅估計在信息融合結構中處于第三級,屬于高級信息融合,常用的目標威脅估計方法有直覺模糊集[1]、貝葉斯推理[2]、規(guī)劃識別[3]和 Elman_AdaBoost[4]等。
近年來,以神經網絡為代表的智能技術在預測[5]、控制[6]、聚類[7]和圖像處理[8]等領域得到了廣泛應用。文獻[9]采用神經網絡解決目標威脅估計問題,取得了較好的結果,但是,神經網絡存在一些不可避免的缺陷,如網絡結構選擇困難、過學習、局部極值以及泛化能力差等。特別是隨著訓練樣本維數(shù)的增加,BP算法收斂速度會變慢,網絡性能也會變差,且若BP神經網絡初始權值和閾值選擇不好,將使得BP神經網絡難以收斂,進而預測效果很差。螢火蟲優(yōu)化(Glowworm swarm optimization,GSO)算法是模擬現(xiàn)實中螢火蟲覓食行為而提出的一種新型元啟發(fā)式搜索算法[10]。本文采用螢火蟲算法來優(yōu)化BP神經網絡,目的是通過螢火蟲算法得到更好的網絡初始權值和閾值,其基本思想就是用個體代表網絡的初始權值和閾值、個體值初始化的BP神經網絡的預測誤差作為該個體的適應度值,通過螢火蟲算法尋找最優(yōu)個體,即最優(yōu)的BP神經網絡初始權值和閾值。采用由螢火蟲算法優(yōu)化得到的最優(yōu)初始權值和閾值來構造BP神經網絡(BP neural network optimized by GSO,GSOBP)。在此基礎上建立了基于螢火蟲算法優(yōu)化BP神經網絡的目標威脅估計模型,提出了基于該威脅估計模型的算法。實驗結果表明,螢火蟲算法優(yōu)化BP神經網絡的預測誤差明顯小于BP和PSO_SVM(support vector machine optimized by particle swarm optimization[11])。基于螢火蟲算法優(yōu)化BP神經網絡的目標威脅估計模型和算法具有很好的預測能力,可以快速、準確地完成目標威脅估計。
1 螢火蟲優(yōu)化算法
在GSO算法中,每只螢火蟲(記作i)由當前位置xi(t)和該處的螢光素值li(t)定義,并且該位置對應著一個目標函數(shù)值f(xi(t))。在算法執(zhí)行過程中,每只螢火蟲向其區(qū)域決策范圍內的鄰居傳遞信息。初始條件下,GSO算法采用目標函數(shù)定義域來初始化決策范圍,然后按式(1)對決策域范圍進行更新。
在螢火蟲i的決策域范圍內的螢火蟲數(shù)量由式(2)決定:

式中:xj(t)為在第t次迭代中螢火蟲j的位置;lj(t)為在第t次迭代中螢火蟲j的螢光素值;螢火蟲i的鄰居數(shù)目取決于決策半徑,感知范圍rs(0<<rs)為其上界。在GSO算法執(zhí)行過程中,螢火蟲i的運動方向由其所有鄰居中各螢火蟲的熒光素數(shù)量來決定;pij(t)表示在第t次迭代中,螢火蟲i向其鄰居螢火蟲j移動的概率,用式(3)計算:

由式(4)計算螢火蟲i移動后的位置:

式中:s為移動步長。
螢火蟲i移動到新位置后,將按式(5)重新計算其螢光素值:

式中:li(t)為在第t次迭代中螢火蟲i的螢光素值;ρ∈ (0,1)為常數(shù),與熒光素揮發(fā)有關;γ為常數(shù),表示熒光素更新率。
在鄰居集合中,當螢火蟲i尋找到具有更高螢光素值的螢火蟲j時,且若此時螢火蟲i和螢火蟲j的距離小于感知半徑,則螢火蟲i以概率pij(t)(由式(3)計算得到)選擇螢火蟲j,并向該方向移動;然后按式(4)更新位置,并計算新位置的目標函數(shù)值;最后,按式(5)對螢光素值進行更新。
基于以上分析,GSO算法主要分為以下4個步驟:初始化螢火蟲、熒光素更新、位置更新和決策域更新。
2 基于GSOBP的目標威脅估計
嚴格來說,目標威脅估計是一個NP-h(huán)ard問題。在JDL數(shù)據融合模型中屬于第三級。目標威脅估計需要考慮的因素很多,如地形、天氣情況、敵、我、友軍的兵力部署以及指揮員的作戰(zhàn)風格等。在進行威脅估計時必須綜合考慮,本文選取6個典型指標,來生成GSOBP目標威脅估計模型,在此基礎上,提出了基于GSOBP目標威脅估計模型的算法。
2.1 目標威脅估計因素
本文在進行目標威脅估計研究時,主要考慮以下6個因素:
(1)目標類型:大型目標(如殲擊轟炸機)、小型目標(如隱身飛機、巡航導彈)、直升機。
(2)目標速度:如120、200、260m/s等。
(3)目標航向角:如11°、28°、36°等。
(4)目標干擾能力:如強、中、弱、無。
(5)目標高度:如低、超低、中、高。
(6)目標距離:如100、110、200m等。
2.2 GSOBP目標威脅估計模型
采用螢火蟲優(yōu)化算法來優(yōu)化BP神經網絡的初始權值和閾值,得到最優(yōu)權值和閾值來構造目標威脅估計模型(GSOBP),然后采用該模型對目標威脅值進行預測。為適應該模型,在原始數(shù)據輸入GSOBP神經網絡之前,需要對數(shù)據進行預處理,包括數(shù)據量化和歸一化。基于GSOBP構造的目標威脅估計模型如圖1所示,下面對模型具體分析。

圖1 基于GSOBP的目標威脅估計模型Fig.1 Model for target threat assessment using GSOBP
(1)數(shù)據預處理
對原始數(shù)據進行預處理,包括數(shù)據量化和歸一化。從而使得預處理后的數(shù)據能夠被GSOBP神經網絡讀入。
(2)訓練集/測試集產生
為了保證訓練數(shù)據的隨機性,隨機選取目標威脅信息庫中的60組數(shù)據作為訓練集數(shù)據,其余15組數(shù)據作為測試集數(shù)據。
(3)GSOBP神經網絡
把訓練集輸入構建好的GSOBP神經網絡,然后進行網絡訓練,具體步驟如下:①GSOBP網絡創(chuàng)建:即利用GSO算法對BP神經網絡的初始權值和閾值進行優(yōu)化,再利用優(yōu)化后的最優(yōu)權值和閾值來構造GSOBP神經網絡;②GSOBP網絡訓練:GSOBP網絡創(chuàng)建完畢后,便可將訓練集向量輸入到網絡中,利用GSOBP神經網絡對網絡的權值和閾值進行調整,直至滿足訓練要求,迭代終止。
(4)目標威脅測試
網絡訓練收斂后,便可以對測試集數(shù)據進行預測,即對測試集的目標威脅值進行預測。
2.3 GSOBP目標威脅估計算法
GSO算法具體實現(xiàn)步驟如下(見圖2):
(1)初始化種群
個體編碼方法為實數(shù)編碼,每個個體由一個實數(shù)串表示,該實數(shù)串由以下4部分組成:輸出層與隱層之間的連接權值、隱層與輸入層之間的連接權值、輸出層閾值以及隱層閾值。每個個體包含了BP網絡全部閾值和權值,若BP網絡結構已知,就可以創(chuàng)建一個權值、閾值和結構都確定的BP網絡。
(2)適應度函數(shù)
根據最優(yōu)個體編碼得到BP網絡的初始權值和閾值,用訓練集訓練BP神經網絡后系統(tǒng)預測輸出,個體適應度值F即為期望輸出與預測輸出之間的誤差絕對值的和,如下式所示

式中:n為BP神經網絡輸出層節(jié)點數(shù);yi為BP網絡節(jié)點i的期望輸出;oi為節(jié)點i的預測輸出;k為常數(shù)。
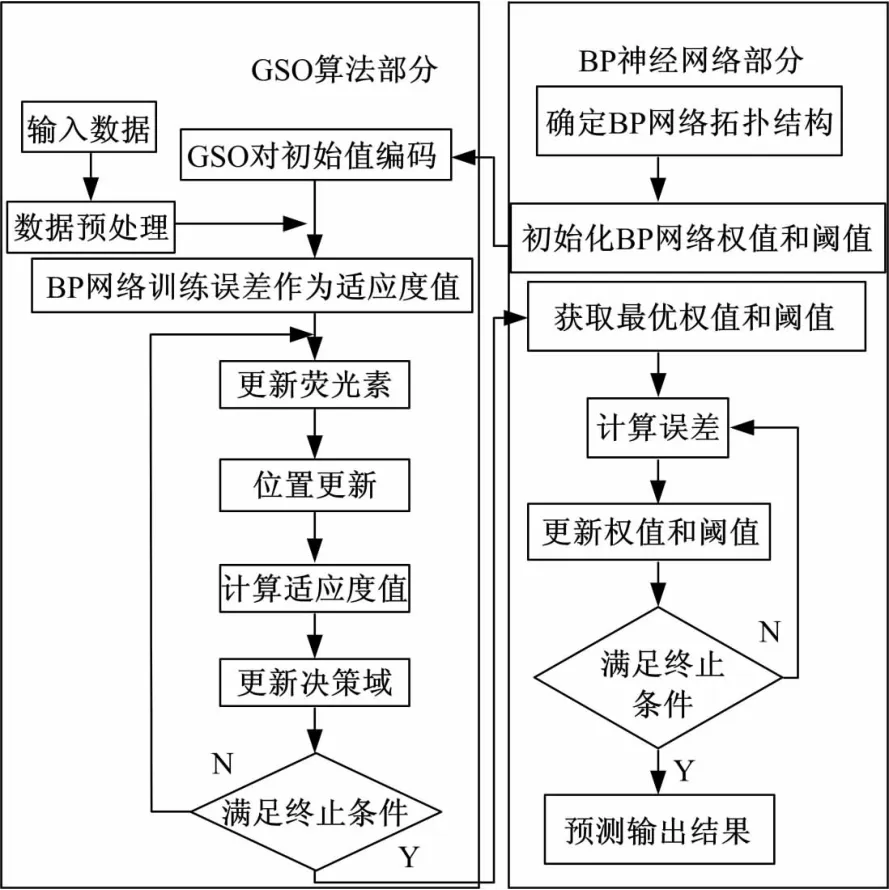
圖2 基于GSOBP的目標威脅估計算法流程圖Fig.2 Flow chart for algorithm target threat assessment using GSOBP
(3)熒光素更新操作
對種群中的每個螢火蟲i按式(6)計算在第t代、位置xi(t)的適應度值,然后依據式(5)利用目標函數(shù)值來計算螢火蟲i的熒光素值。
(4)位置更新操作
在GSO算法中,當螢火蟲i尋找到具有更高螢光素值的螢火蟲j時,且若此時螢火蟲i和螢火蟲j的距離小于感知半徑,則螢火蟲i以概率pij(t)選擇螢火蟲j,并向此方向移動;然后按式(4)更新位置,并利用式(6)計算更新后位置的目標函數(shù)值,進而更新全局最優(yōu)值。
(5)決策域更新操作
在位置更新后,螢火蟲i將根據其鄰居密度對決策半徑進行動態(tài)更新(按式(1))。如果鄰居密度太小,將增大決策半徑,從而有利于搜索更多的鄰居螢火蟲,反之,將減小半徑。
BP神經網絡部分與普通BP網絡類似,具體實現(xiàn)步驟簡單介紹如下:
(1)確定BP網絡結構
隨機初始化BP神經網絡的權值和閾值,按照螢火蟲算法的編碼要求對初始權值和閾值進行編碼,然后將該編碼輸入GSO算法進行優(yōu)化,算法隨即執(zhí)行GSO算法部分。
(2)構造GSOBP神經網絡
從GSO算法部分獲取GSO算法優(yōu)化后的權值和閾值,構造GSOBP神經網絡。采用訓練集對網絡進行訓練,計算訓練誤差,訓練誤差滿足要求時,停止對GSOBP網絡的訓練。
(3)預測輸出
將測試集輸入訓練好的GSOBP神經網絡,預測輸出目標威脅值。
3 模型仿真與驗證
采用 MATLAB R20112a(7.14),在硬件為Pentium(R)4CPU 3.06GHz,1G內存的機器上,編程實現(xiàn)了本文提出的基于GSOBP目標威脅估計模型的算法。
3.1 數(shù)據預處理
采集75組數(shù)據,其中大型目標、小型目標和直升機各25組。測試集分別選擇大型目標、小型目標和直升機各20組,共60組。其他15組數(shù)據作為測試集。部分數(shù)據如表1所示。
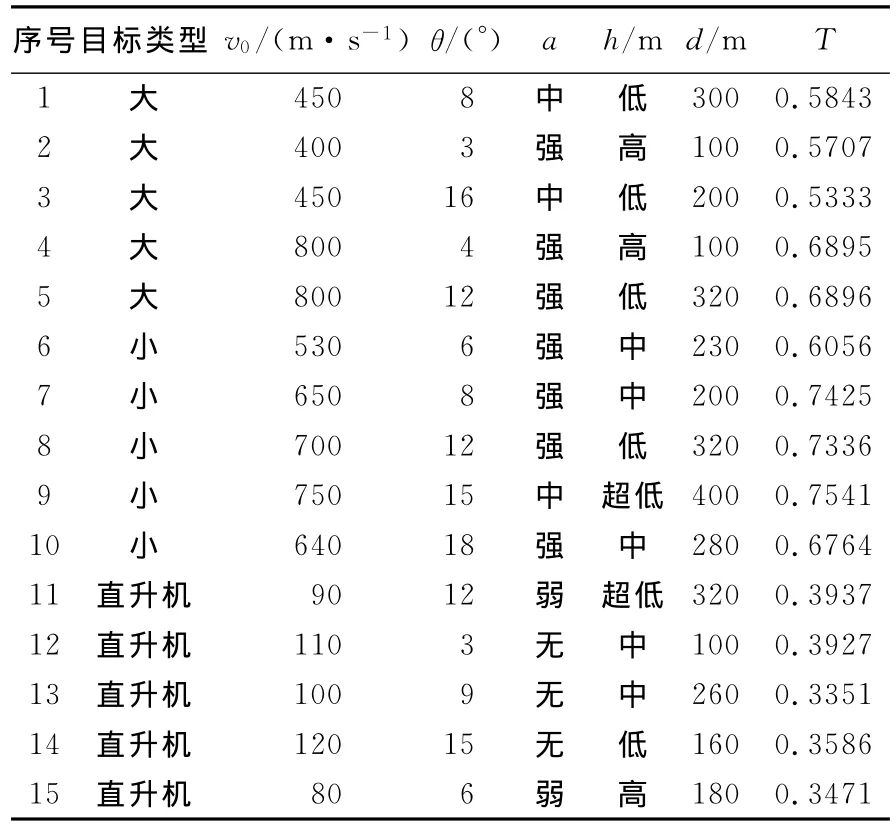
表1 部分原始數(shù)據Table 1 Part of data
本文對目標威脅屬性采用G.A.Miller的9級量化理論進行量化,1~9分別表示威脅程度極小、非常小、較小、小、中、大、較大、非常大、極大。對描述性屬性做如下預處理:
(1)目標類型:大型目標(如殲擊轟炸機)、小型目標(如隱身飛機)、直升機依次量化為3、5、8。
(2)目標干擾能力:如強、中、弱、無,依次量化為2、4、6、8。
(3)目標高度:如超低、低、中、高,分別量化為2、4、6、8。
對于目標速度、目標高度和目標距離等屬性則可以直接進行歸一化,然后轉化為GSOBP神經網絡能夠識別的形式。
3.2 仿真結果
對于GSOBP神經網絡,有6個輸入參數(shù)、1個輸出參數(shù),所以設置GSOBP神經網絡結構為6-11-1,即輸入層有6個節(jié)點,隱含層有11個節(jié)點,輸出層有1個節(jié)點,共有6×11+11×1=77個權值,11+1=12個閾值,所以螢火蟲算法個體編碼長度為77+12=89。
將原始數(shù)據隨機分成兩組,分別作為訓練集和測試集。其中,訓練集包含60組不同目標類型的數(shù)據,用于網絡訓練,測試集為剩余的15組數(shù)據。把訓練數(shù)據預測誤差絕對值的和作為個體適應度值,個體適應度值越小,該個體越優(yōu)。
其他參數(shù)設置如下:在螢火蟲算法中,熒光素初值l0=5,動態(tài)決策域的更新率β=0.08,用于控制螢火蟲鄰居數(shù)目的鄰居閾值nt=5,步長s=0.05,熒光素更新率γ=0.6,熒光素揮發(fā)系數(shù)ρ=0.4,螢火蟲感知范圍rs=5,進化次數(shù)maxgen=100,種群規(guī)模popsize=30。在網絡訓練過程中,進化參數(shù)設置為:學習率net.trainParam.lr=0.1,訓練目標net.trainParam.goal=0.00001。
螢火蟲算法優(yōu)化過程中最優(yōu)個體適應度值變化如圖3所示。從圖3可以看出,螢火蟲算法在種群為30的情況下,經過70次進化即收斂于最佳適應度值0.28,這說明螢火蟲算法只需要很小的代價,就能尋找到最優(yōu)的BP神經網絡權值和閾值。
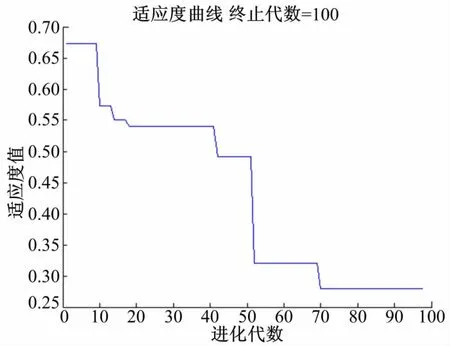
圖3 GSO算法進化過程Fig.3 Evolution process of GSO
GSOBP和BP網絡以及支持向量機等都可以進行預測,且都可以用于解決目標威脅估計問題。由于支持向量機參數(shù)c和g的選擇沒有統(tǒng)一的標準,只能依靠經驗,故本文采用粒子群算法[11]來優(yōu)化SVM參數(shù)c和g。
根據所采用數(shù)據的特點,BP神經網絡結構為6-11-1.PSO_SVM 采用 LIBSVM 工具箱[12]。交叉驗證確定最優(yōu)懲罰參數(shù)c和核函數(shù)參數(shù)g時采用PSO算法進行優(yōu)化。默認情況下,PSO局部搜索能力c1=1.5,全局搜索能力c2=1.7,最大進化次數(shù)maxgen=100,最大種群數(shù)popsize=30,彈性系數(shù)wv=1,SVM參數(shù)c和參數(shù)g的變化范圍分別為[0.1,100]和[0.01,1000]。
采用訓練好的BP網絡和PSO_SVM對目標威脅估計問題進行預測,實驗結果如圖4和圖5所示。從圖4和圖5可以看出,GSOBP預測結果最接近真實值,預測誤差明顯小于BP和PSO_SVM。其中,在樣本11、13和14處,BP神經網絡誤差小于PSO_SVM,在樣本2、3、12和15處,PSO_SVM誤差小于BP神經網絡,而在樣本5和7處,PSO_SVM和BP神經網絡誤差相等,在樣本6處,GSOBP和BP神經網絡誤差相等,在樣本1、4、8、9和10處,GSOBP、BP神經網絡和PSO_SVM誤差相等。
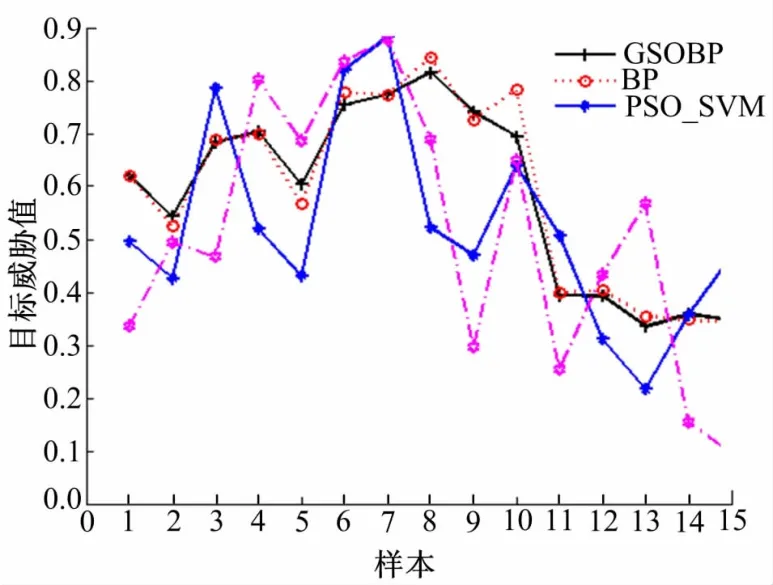
圖4 測試集的實際威脅值和預測威脅值Fig.4 Accurate and predictive threat value of testing set
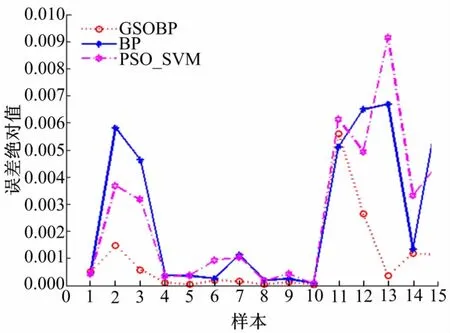
圖5 BP、PSO_SVM和GSOBP預測誤差絕對值Fig.5 Absolute predictive error of BP,PSO_SVM and GSOBP
4 結束語
本文根據信息化戰(zhàn)爭對信息快速及時處理的要求,針對信息融合中目標威脅估計的特點,綜合考慮了影響目標威脅值的各種因素,提出了一種基于GSOBP的目標威脅等級估計方法,建立了基于GSOBP的目標威脅估計模型,提出了基于GSOBP目標威脅估計模型的算法。選取了6個典型指標,采集了75組數(shù)據用于仿真實驗。結果表明,螢火蟲算法優(yōu)化BP神經網絡的預測誤差明顯小于BP和PSO_SVM。該模型及其算法具有很好的預測能力,可以快速、準確地完成對作戰(zhàn)目標威脅的估計,為目標威脅估計提供了一種新的途徑。
[1]雷英杰.基于直覺模糊推理的態(tài)勢與威脅評估研究[D].西安:西安電子科技大學,2005.Lei Ying-jie.Research on situation and threat assessment based on intuitionistic fuzzy reasoning[D].Xi'an:Xidian University,2005.
[2]楊健,高文逸,劉軍.一種基于貝葉斯網絡的威脅估計方法[J].解放軍理工大學學報:自然科學版,2010,11(1):43-48.Yang Jian,Gao Wen-yi,Liu Jun.Threat assessment method based on Bayesian network[J].Journal of PLA University of Science and Technology(Natural Edition),2010,11(1):43-48.
[3]王曉帆,王寶樹.基于直覺模糊與計劃識別的威脅評估方法[J].計算機科學,2010,37(5):175-177.Wang Xiao-fan, Wang Bao-shu.Techniques for threat assessment based on intuitionistic fuzzy theory and plan recognition[J].Computer Science,2010,37(5):175-177.
[4]王改革,郭立紅,段紅,等.基于Elman_AdaBoost強預測器的目標威脅評估模型及算法[J].電子學報,2012,40(5):901-906.Wang Gai-ge,Guo Li-h(huán)ong,Duan Hong,et al.The model and algorithm for the target threat assessment based on Elman_AdaBoost strong predictor[J].Acta Electronica Sinica,2012,40(5):901-906.
[5]龔勃文,林賜云,李靜,等.基于核自組織映射-前饋神經網絡的交通流短時預測[J].吉林大學學報:工學版,2011,41(4):938-943.Gong Bo-wen,Lin Ci-yun,Li Jing,et al.Shortterm traffic flow prediction based on KSOM-BP neural network[J].Journal of Jilin University (Engineering and Technology Edition),2011,41(4):938-943.
[6]趙宏偉,齊一名,臧雪柏,等.基于系統(tǒng)辨識與T-S模糊神經網絡的磨礦分級控制[J].吉林大學學報:工學版,2011,41(1):171-175.Zhao Hong-wei,Qi Yi-ming,Zang Xue-bai,et al.Control of milling classification using system identification and T-S fuzzy neural network[J].Journal of Jilin University (Engineering and Technology Edition),2011,41(1):171-175.
[7]劉大有,張冬威,李妮婭,等.基于網絡聚類選擇的神經網絡集成方法及應用[J].吉林大學學報:工學版,2011,41(4):1034-1040.Liu Da-you,Zhang Dong-wei,Li Ni-ya,et al.Selective approach for neural network ensemble based on network clustering technology and its application[J].Journal of Jilin University (Engineering and Technology Edition),2011,41(4):1034-1040.
[8]許新征,丁世飛,史忠植,等.圖像分割的新理論和新方法[J].電子學報,2010,38(2A):76-82.Xu Xin-zheng,Ding Shi-fei,Shi Zhong-zhi,et al.New theories and methods of image segmentation[J].Acta Electronica Sinica,2010,38(2A):76-82.
[9]羅艷春,郭立紅,姜曉蓮,等.基于模糊神經網絡的空中目標威脅估計[J].微計算機信息,2007,23(34):268-270.Luo Yan-chun,Guo Li-h(huán)ong,Jiang Xiao-lian,et al.Threat assessment for aerial target based on fuzzy neural network[J].Microcomputer Information,2007,23(34):268-270.
[10]Krishhand K N,Ghose D.Glowworm swarm optimization for simultaneous capture of multiple local optimal of muultimodal functions[J].Swarm Intelligence,2009,3(2):87-124.
[11]Kennedy J,Eberhart R.Particle swarm optimization[C]∥Proceeding of the IEEE International Conference on Neural Networks,Perth,Australia,1995.
[12]Chang C C,Lin C J.LIBSVM:a library for support vector machines[J].ACM Transactions on Intelligent Systems and Technology(TIST),2011,2(3):1-27.