基于北斗衛(wèi)星導(dǎo)航系統(tǒng)的功率倒置算法仿真研究
2013-08-16 06:12:40曹有權(quán)
科技視界 2013年5期
曹有權(quán)
(西安導(dǎo)航技術(shù)研究所,陜西西安710068)
1 北斗衛(wèi)星導(dǎo)航系統(tǒng)概述
北斗衛(wèi)星導(dǎo)航系統(tǒng)是中國(guó)正在實(shí)施的自主發(fā)展、獨(dú)立運(yùn)行,并與世界其他衛(wèi)星導(dǎo)航系統(tǒng)兼容共用的全球衛(wèi)星導(dǎo)航系統(tǒng),其發(fā)展目標(biāo)是對(duì)全球提供無源定位[1]。北斗衛(wèi)星導(dǎo)航系統(tǒng)的應(yīng)用前景非常廣闊,但與此同時(shí),它的工作環(huán)境同樣面臨著嚴(yán)峻的挑戰(zhàn),衛(wèi)星導(dǎo)航系統(tǒng)的信號(hào)非常微弱,其功率強(qiáng)度甚至遠(yuǎn)低于接收機(jī)內(nèi)部噪聲[2],微弱的干擾就可能使導(dǎo)航系統(tǒng)不能正常工作,尤其是有意或者無意的壓制式干擾。
對(duì)北斗的干擾從頻率角度可以分為帶內(nèi)干擾和帶外干擾,帶外干擾可以在射頻和中頻設(shè)置窄帶濾波器進(jìn)行濾除,而帶內(nèi)干擾可采用自適應(yīng)陣列天線來解決。 北斗接收機(jī)收到的干擾數(shù)目、干擾方向及干擾類型無法預(yù)知,衛(wèi)星信號(hào)的來向和數(shù)目也在實(shí)時(shí)變化,這種情況下采用功率倒置自適應(yīng)算法抑制干擾顯得簡(jiǎn)單有效[3]。
2 功率倒置的原理
功率倒置自適應(yīng)算法是基于線性約束最小方差(LCMV)準(zhǔn)則建立的[4],也就是將自適應(yīng)陣列的輸出功率最小作為最優(yōu)化準(zhǔn)則[5]。 功率倒置算法的示意如圖1 所示:

圖1 功率倒置算法示意圖
在M 元功率倒置陣列中,陣列的輸入向量為:

其對(duì)應(yīng)的權(quán)系數(shù)分別為:

一般有約束條件wHs=1,其中s=[1,0,…,0]T,由此可得出w1=1,這是要求第一支路的加權(quán)系數(shù)始終為1。
則陣列的輸出功率:

上式中Rxx=E {x(n)xH(n) }為輸入矢量的自相關(guān)矩陣。
則功率倒置波束形成的準(zhǔn)則如下:

令ΔwL(w)=0,
可得最佳的加權(quán)矢量和最小輸出功率為:

功率倒置陣對(duì)輸入端的信號(hào),不管是有用信號(hào)還是干擾信號(hào)都盡可能地加以抑制,天線方向圖將在各個(gè)有用信號(hào)和干擾信號(hào)的來向產(chǎn)生零陷,并且信號(hào)越強(qiáng),其對(duì)應(yīng)的零陷越深。因?yàn)樵诒倍沸l(wèi)星導(dǎo)航系統(tǒng)中,干擾信號(hào)遠(yuǎn)遠(yuǎn)大于噪聲信號(hào)和有用的衛(wèi)星信號(hào),那么零陷將僅僅對(duì)準(zhǔn)干擾方向,這樣在干擾也就被大大的抑制,相當(dāng)于提高了系統(tǒng)輸出端的信干比[6]。
3 試驗(yàn)仿真
用Matlab 建立仿真模型,對(duì)功率倒置算法進(jìn)行仿真研究。
3.1 窄帶信號(hào)波束仿真
假設(shè)信號(hào)中心頻率為1268.52MHz,信號(hào)功率為-130dBm,陣列中存在高斯白噪聲信號(hào),噪聲功率為-100dBm。以四單元陣列為例,對(duì)功率倒置算法進(jìn)行仿真。 四陣元最典型的有兩種分布形式,分別為四元Y 型陣分布和四元方型陣分布兩種。兩種陣元的具體分布如下圖2 所示,陣元之間間距d 為信號(hào)的半波長(zhǎng)。

圖2 四元Y 型陣和方型陣分布圖
假設(shè)信號(hào)來向?yàn)椋?0°,80°),干擾信號(hào)由(50°,50°)入射,干信比為40dB,即干擾信號(hào)功率為-90dBm,采樣快拍數(shù)位2000。 分別對(duì)兩種陣元模式進(jìn)行仿真。 結(jié)果如下:
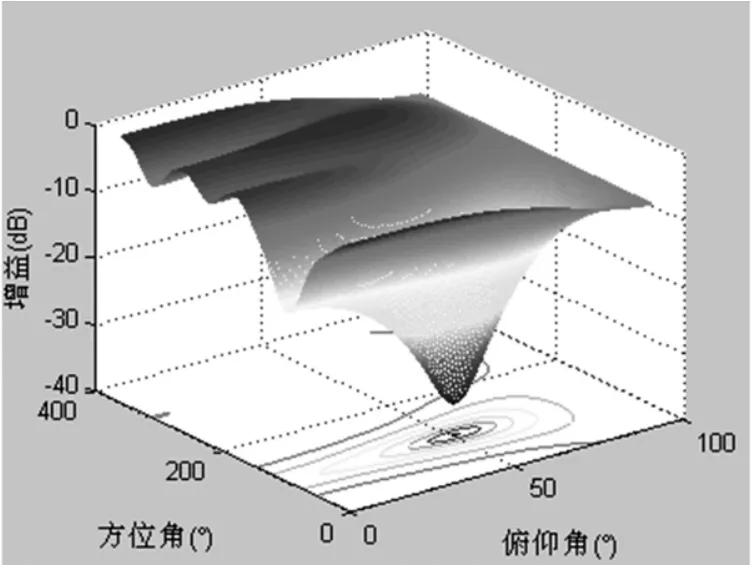
圖3 Y 型陣全視角的方向圖
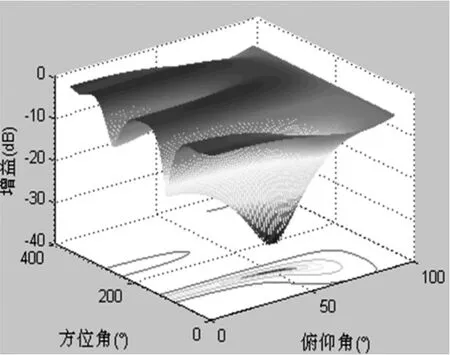
圖4 方型陣全視角的方向圖
從上面圖中可以看出,兩種陣列模式在干擾方向都能形成明顯的零陷,從而都能有效抑制干擾,但是Y 型陣最大零陷深度為-35.05dB,方型陣最大零陷深度為-33.38dB,即Y 型陣在干擾方向形成的零陷更深。
仿真分析兩種陣列模式在不同干擾強(qiáng)度下的方向圖,具體結(jié)果見表1 所示:

表1 兩種陣列模式在不同干擾強(qiáng)度下的最大零陷深度
從上表可以看出,在干信比為40dB 到90dB 的范圍內(nèi),Y 型陣的最大零陷深度普遍要深于方型陣的最大零陷深度,從而對(duì)于干擾有更徹底的抑制效果。 即Y 型陣要優(yōu)于方型陣,這和Y 型陣在陣元分布與信號(hào)來向分布的空間不相關(guān)方面具有的優(yōu)勢(shì)有很大關(guān)系。
3.2 Y 型陣多干擾方向圖
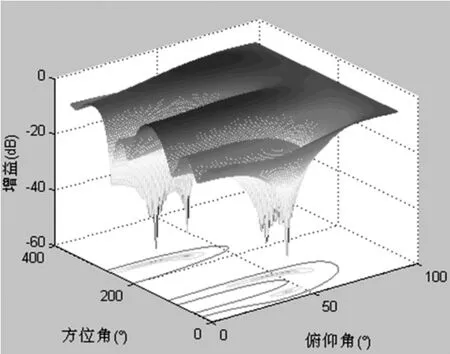
圖5 干信比為40dB 兩干擾方位圖

圖6 干信比為60dB 三干擾方向圖
上面仿真分析得出,四陣元Y 型陣要優(yōu)于方型陣,以四陣元Y 型陣為模型,分析功率倒置算法對(duì)于多干擾的抑制性能。
假設(shè)信號(hào)來向?yàn)?(20°,80°), 存在兩個(gè)干擾, 干擾來向分別為(50°,100°)和(30°,260°),兩個(gè)干擾信號(hào)強(qiáng)度都為-90dBm,即干信比為40dB 時(shí)的方位圖。若同時(shí)在(70°,320°)方向存在第三個(gè)干擾,且三個(gè)干擾干信比均為60dB 時(shí)的方向圖。
從上面圖中可以看出,在兩個(gè)干擾情況下,能在干擾方向形成準(zhǔn)確的零陷,在三干擾情況下能在(50°,100°)和(30°,260°)處形成準(zhǔn)確的零陷,能對(duì)這兩個(gè)干擾很好地處理,雖沒有在(70°,320°)位置形成明確的零陷,但在方位70°的地方形成了零陷,對(duì)于該干擾也有一定的抑制。 出現(xiàn)該情況的原因是由于自由度的原因,對(duì)于N 元陣列可以形成N-1 個(gè)自由度,即信號(hào)源個(gè)數(shù)和干擾源個(gè)數(shù)總和不得大于N-1,所以四陣元抵抗三個(gè)干擾已達(dá)到了自身的最大能力。如果需要抵抗更多個(gè)數(shù)的干擾,就需要增多陣元個(gè)數(shù)。
以上借助北斗衛(wèi)星信號(hào)的中心頻率值和信號(hào)強(qiáng)度,以窄帶信號(hào)為例,對(duì)于功率倒置算法的有效性進(jìn)行了仿真。 北斗信號(hào)區(qū)別于GPS 信號(hào)最大的區(qū)別在于它是寬帶信號(hào),信號(hào)帶寬為20MHz,之前分析四陣元得出Y 型陣元模式優(yōu)于方型陣元模式, 則以四陣元Y 型陣元模式為例,分析功率倒置算法對(duì)于寬帶信號(hào)的抗干擾處理。
3.3 Y 型陣寬帶信號(hào)
假設(shè)信號(hào)中心頻率為1268.52MHz, 信號(hào)寬帶為20M, 信號(hào)功率為-130dBm,期望信號(hào)由(80°,0°)方向入射,干擾信號(hào)的信號(hào)帶寬同樣為20MHz,干擾信號(hào)來向?yàn)椋?0°,100°),干擾信號(hào)強(qiáng)度為-70dBm,即干信比為60dB,噪聲功率為-100dBm,采樣快拍數(shù)為2000。
由于目前受模數(shù)轉(zhuǎn)換器件和數(shù)字信號(hào)處理器件處理速度的限制,對(duì)北斗衛(wèi)星信號(hào)進(jìn)行抗干擾處理時(shí),必需先將射頻接收信號(hào)下變頻至中頻信號(hào)再進(jìn)行處理。仿真中將信號(hào)中心頻率1268.52M 變化到零頻,得到的具體結(jié)果如下:

圖7 抗干擾前的信號(hào)

圖8 抗干擾處理后的信號(hào)
從上面兩個(gè)圖可以明確地看出,功率倒置算法對(duì)于干擾進(jìn)行了很好地抑制。 比較寬帶信號(hào)情況下不同干信比的方向圖如圖9 和圖10所示。
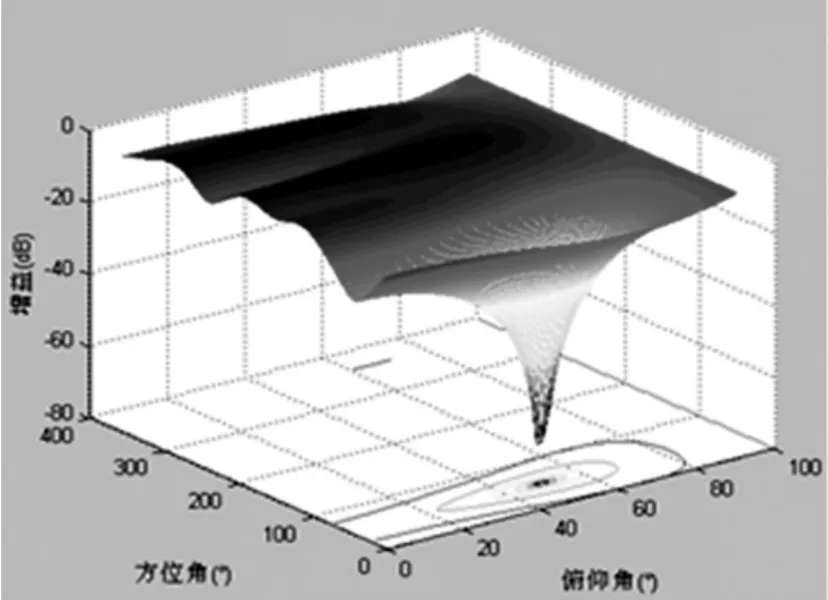
圖9 干信比為50dB 的方向圖

圖10 干信比為90dB 的方向圖
從上面兩個(gè)圖可以看出,不同干信比下,在干擾方向都形成了準(zhǔn)確的零陷,同時(shí)干擾越強(qiáng),零陷越深,對(duì)于干擾的抑制效果越好,和窄帶信號(hào)時(shí)的特性一致。
即功率倒置算法適用于北斗衛(wèi)星系統(tǒng),能對(duì)壓制式干擾進(jìn)行有效的抑制。
4 結(jié)束語
功率倒置算法因自身特點(diǎn),在抗干擾方面有著特殊的貢獻(xiàn),本文通過Matlab 仿真驗(yàn)證了該算法對(duì)于窄帶信號(hào)和寬帶信號(hào)干擾抑制的有效性,從而說明了它在北斗衛(wèi)星導(dǎo)航系統(tǒng)抗干擾領(lǐng)域的適用性,仿真結(jié)果對(duì)于實(shí)際的工程應(yīng)用有很好的參考作用。
[1]贠敏,葛榜軍.北斗衛(wèi)星導(dǎo)航系統(tǒng)及應(yīng)用[J].衛(wèi)星應(yīng)用,2012(5):19-23.
[2]唐金元,于潞,王思臣.北斗衛(wèi)星導(dǎo)航定位系統(tǒng)應(yīng)用現(xiàn)狀份分析[J].全球定位系統(tǒng),2008(2):27-29.
[3]仉智權(quán),朱暢,馮起,袁乃昌.功率倒置算法在北斗抗干擾天線系統(tǒng)中的應(yīng)用[J].電子設(shè)計(jì)工程,2012(2):42-43.
[4]張平定,王睿.一種新的天線旁瓣對(duì)消抗干擾技術(shù)的實(shí)現(xiàn)[J].現(xiàn)代雷達(dá),2002,24(2):80-82.
[5]廖群,鄭建生,黃超.GPS 自適應(yīng)抗干擾算法及其FPGA 實(shí)現(xiàn)[J].現(xiàn)代雷達(dá),2006(4):79-81.
[6]何永前,李建璜.GPS 抗干擾接收機(jī)自適應(yīng)天線陣功率倒置算法研究[J].艦船電子工程,2012(6):61-62.
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00