信息融合技術在軍事領域的應用與研究*
2013-08-10 07:54:14龔純
艦船電子工程 2013年7期
龔 純
(中國艦船研究設計中心 武漢 430064)
1 引言
隨著電子技術、信息處理技術的飛速發展,數據融合技術已廣泛應用于各種復雜領域。該技術是關于把多個傳感器在空間或時間上的冗余或互補信息,依據某種準則進行組合,以獲得對被測對象的一致性解釋或描述,它有助于對目標截獲、識別機跟蹤性能的改善。它將不同來源、不同模式、不同時間、不同地點、不同表現形式的信息進行融合,最后得出被感知對象的精準描述[1~3]。
2 數據融合技術
2.1 數據融合技術基本定義
數據融合(Data Fusion,DF)的字面意義即對來自多個傳感器或信息源的數據進行綜合和提煉。但同其他許多名詞一樣,至今缺乏一個為領域研究者普遍接收的定義,常見有以下三種[4]:
1)美國國防部的定義:數據融合是一個多級多側面的加工過程,包括對多個數據源數據和信息的自動化的檢測、互聯、相關、估計和組合處理。
2)Wald定義:數據融合是一個形式化的框架,由于聯合多個數據源數據的明確的方法和工具組成;融合的目的是為了獲得較高質量的信息,這里“較高質量”的確切的含義則取決于應用。
3)Buede和Waltz的定義:數據融合是一個自適應的知識創建過程,通過對來自各種信息源的一致或不一致觀測數據的校正、相關和合并處理,建立起有組織信息索引集,并由此對某個特定的觀測區域的結構、行為進行建模、理解和解釋。
2.2 數據融合模型
在數據融合的理論和模型研究中,最有代表性的當屬美國國防部于1986年創建的數據融合過程模型,該模型是一個通用的面向功能的概念化模型,采用分層結構,其頂層由八個部分組成,包括:信息源、人機交互、信息源預處理、第一級處理(對象精練)、第二級處理(態勢精練)、第三級處理(威脅精練)、第四級處理(過程精練)和數據管理。如圖1所示。
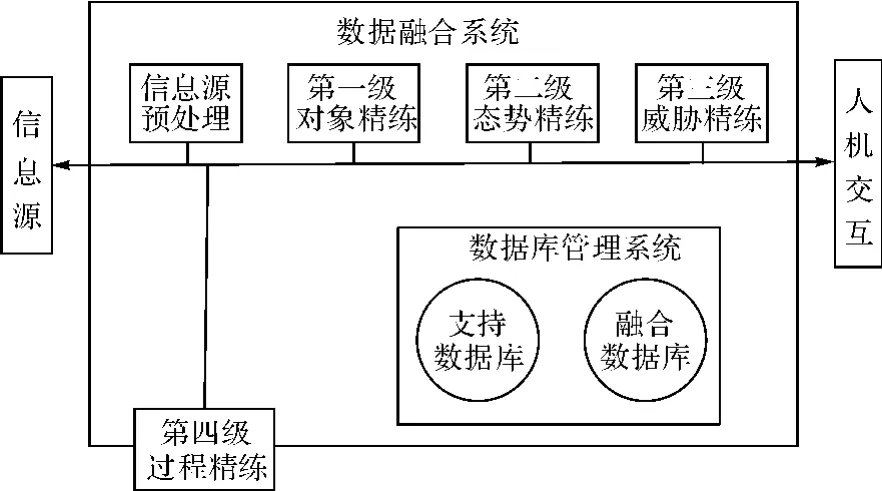
圖1 數據融合的過程模型
3 數據融合的層次分析
由于數據的多樣化,在多傳感器數據融合中目標識別級融合有三種基本結構[5]:即數據層融合、特征層融合和決策層融合結構。
三種層次各有其特點,可針對不同的情況采取不同的方法進行。數據層融合是最低層的融合,是在對傳感器原始信息(數據)未經過或經過很小處理的基礎上進行的,它需要各個融合的傳感器信息源具有精確到一個像素的配準精度的任何抽象層次的融合[6]。優點是能夠提供其他兩種層次融合所不具有細節信息,但也具有處理代價大、通信量大、抗干擾能力差、對傳感器要求高的局限性。
決策層融合的優缺點正好與數據層融合相反,其傳感器可以是異質傳感器,預處理代價高,融合處理代價小、通信量小、抗干擾能力強的特點。
特征層融合則是上述兩種層次信息融合的折中形式,兼有兩者的優缺點。各層次融合的優缺點詳見表1。
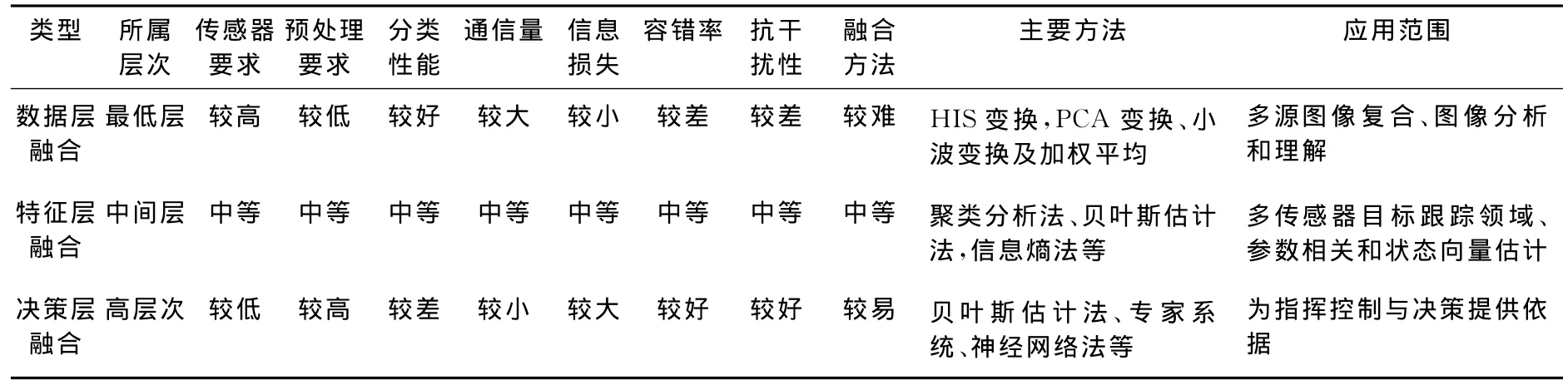
表1 三種層次融合對比分析表
4 應用領域
4.1 水聲目標探測識別的應用
數據融合技術在水下水聲目標探測識別方面是較早應用的領域。由于水下環境的復雜性和不確定性,造成了單個傳感器接收信息不僅不全面而且不可靠,從而使得多個傳感器的聯合使用成為一個趨勢。現代艦艇往往配備多部主動聲納和被動聲納,搜集不同方位的目標信息或者同一目標的不同特征信息,將多組信息融合處理,則能夠得到更全面的信息,進而做出更精確的判斷。
水下目標探測中數據融合技術應用主要是在已有的檢測技術[7]中運用分布式融合機制,即各傳感器基于自身的觀測值,對目標存在與否進行判決,然后將判決結果送至融合中心。在融合中心,按照Neyman-Pearson準則,將N個均不判據結果進行融合。在這種分布式檢測融合機制,由于不需要將每個傳感器數據傳輸至融合中心,而只傳送判決結果,所以可以在很大程度上降低系統的通信壓力,減小了融合中心的計算負荷,提高了系統的運作效率。但是,由于假設每個傳感器的測量值是獨立的,即每個傳感器只基于自身的測量值得到判決,而不考慮與其他傳感器的相關性,系統未能有效地利用各傳感器的信息。這樣,可能會增大系統誤差。
水下目標識別[8]方面的應用則主要是將多個方位的分類結果進行融合,該分類可以是決策層的[9],也可以是特征層的[10],前者原理就是將多個方位的分類結果進行融合,后者是對每個方位抽取的特征信息進行融合,而不是對它們的分類結果進行融合,如圖2所示。
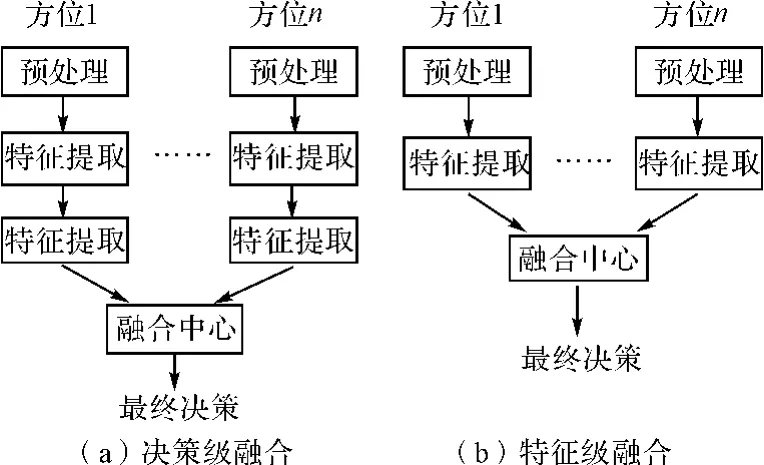
圖2 用于水下目標分類的數據融合框圖
通過數據融合處理后的信息具有更好的目標跟蹤性能,使得在水下復雜環境下對目標探測和識別能力大大增強。
4.2 計程儀中的應用
復合式計程儀作為一種速度測量的基本導航設備,對測速數據的實時性和穩定性要求非常高,多傳感器數據融合技術是解決這一問題的有效手段。復合式計程儀多傳感器數據融合處理主要是為了解決信息穩定性和機動狀態下的實時性之間的矛盾,同時在測速精度一致的情況下,提高速度信息的置信度[11]。以某型復合式計程儀為例:該計程儀配備了三個電磁測速傳感器,其原理是采用了加權平均算法作為基本的數據融合算法,權值通過統計某路測速傳感器的速度數據序列的數學期望和方差得到。數據融合技術在該領域的應用原理如圖3所示。
由圖3可見,輸入數據是三路電磁傳感器的速度信號和狀態信號。根據通道特性,在時間上順序統計各通道一定時間內的數學期望和方差,利用其統計量與綜合處理后速度和相應航行狀態進行比較,從而判斷該路信號是否可信。對速度估計信號,當信息不可信的情況下自動分配其當前權值為0,在信息可信時,自適應的給出相應的權分配值和該路信息當前的速度估計值,權值大小與方差成反比。估計每路信號的估計值和所分配的權值后,算法根據一致傳感器的貝葉斯估計方法對綜合測量信息進行空間濾波,最后輸出數據融合結果和各傳感器狀態信息。
數據融合技術在復合式計程儀中的應用一方面使得融合后方差比單值測量的方差要小,從而提高了設備任務可靠性和信息穩定度;另一方面,信息融合算法增加了變速判斷功能,當速度變化時賦予最新測量值以更大的權值,使得估計值更快的跟蹤變化的速度,因此提高了速度信息的實時性,改善了信息質量。
4.3 預警機系統中的應用
預警機是現代防空作戰指揮和情報保障的重要組成部分,預警機系統內各傳感器信息的綜合利用離不開包括預警雷達與敵我識別器、主雷達與ESM接收機系統等在內的傳感器,并進行數據融合,從而獲得完整而及時的戰場態勢和威脅估計[14]。
以預警機中對目標獲取信息的兩種最重要傳感器-主雷達與ESM為例進行數據融合技術應用分析:前者是一種主動雷達,通過發射脈沖和接收目標回波來獲取有關目標的位置及其運動參數,后者通過截獲目標發射的電磁信號,提取輻射源信號特征,再進一步由輻射源特征識別出目標類型。ESM在截獲輻射源信息同時還能測定輻射源的方向信息,即獲得目標所在的角度,ESM通常有比雷達更大的作用距離,因而可以在更大范圍內發現目標,從而為主雷達指示目標。因此,根據主雷達與ESM各自的特點,在進行數據融合前首先要將兩者對目標的位置數據校準到同一時刻,然后采用一定的準則判斷兩者信息源來自同一目標。對各目標的位置數據與輻射源角度進行跟蹤和濾波,比較同一時間點上各目標與各輻射源濾波后的角位置值,計算兩種角位置數據任一對之間的相關數據值,當這一相關度值超過預定的閾值時,認為可能是相關的,再超過預知的角位置對中,選擇最大的一對,認為他們是相關的目標與輻射源。預警機系統數據融合處理原理框圖見圖4。
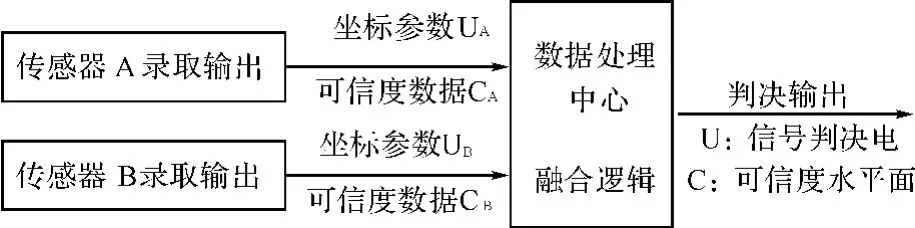
圖4 預警機系統數據融合處理原理框圖
由此可見,預警機系統中充分利用不同目標各個方向、不同頻段的反射特性,采用數據融合技術對信息進行處理后最大限度地提取信息,滿足戰場對信息、目標識別和態勢分析的需要,從而全面提高系統對目標探測和識別性能。
5 結語
近幾年來,數據融合技術普遍應用于軍事、工業、交通、醫學等不同領域。伴隨著該技術基礎理論研究地不斷深入和科研人員地不懈努力,相信在不久的將來,數據融合技術相關算法的完善、軟硬件支持環境的構建以及測試平臺的開發,必將給該技術的發展帶來更廣闊的應用前景。
[1]何友,王國宏.多傳感器信息融合及應用[M].北京:電子工業出版社,2010:1-12.
[2]Waltz E,L ilnas J.Multisensor data fusion[M].Boston:A retch House,2000:9-17.
[3]Sasiadek J Z.Sensor fusion[J].Annual Reviews in Control,2002,26(26):203-228.
[4]衛愛萍,王士杰,等.現代艦艇火控系統[M].北京:國防工業出版社,2008(1).
[5]熊凌,張凱.數據融合及其應用[J].湖北工業大學學報,2005,20(3):145-147.
[6]黃惠寧,劉源璋,梁昭陽.多傳感器數據融合技術概述[J].科技信息,2010(15):72-73.
[7]白銀生,趙俊渭,相明.基于N-P準則的水聲信號檢測系統信息融合[J].信息與控制,2003,32(6):517-520.
[8]Fairweather J R,Greig A,et al.Object recognition by machine vision to enhance scene interpretation in an underwater application[C]//OCEANS’95.MTS/IEEE.Challenges of Our Changing Global Environment’.Conference Proceedings,1995:1865-1870.
[9]Yao M de,Sadjadi R A,Jamshidi A A,et al.A study of effects of sonar bandwidth for underwater target classification[J].IEEE Journal of Oceanic Engineering,2002,27(3):619-627.
[10]Jaime Salazar,Marc Robinson,Mahmood R,et al.A hybrid HMM-neural network with gradient descent parameter training[C]//Neural Network:Proceedings of the International Joint Conference,2003:1086-1091.
[11]潘琪祥.談談船速和計程儀改正率測定方法的改進[J].天津航海,2001(4):34-36.
[12]鄒偉,劉兵,孫倩.多源信息融合能力評估關鍵技術綜述[J].計算機與數字工程,2010(3).
[13]馮貴玉,趙琪,張可黛,等.多源信息融合認知機理與模型研究[J].計算機與數字工程,2013(2).
[14]趙躍,馬鑫.數據融合技術在預警機系統中的應用[J].國防科技,2007,2(2):26-28.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32