用于水下網絡節點的超低功耗遠程接入系統*
2013-08-10 09:04:12劉桂山張寶貴
艦船電子工程 2013年8期
關鍵詞:系統
劉桂山 張寶貴
(中國船舶重工集團第七一〇研究所 宜昌 443000)
1 引言
水下無線傳感器網絡是陸地無線傳感器網絡概念的延伸[1],在海洋數據采集、環境監測、災難預報、輔助導航以及水下軍事防御等方面有著廣泛的應用,對國防和海洋資源開發具有十分重要的意義。水下無線傳感器網絡一般由多個固定式水下感器節點和移動式水下航行器節點構成,它們被布防在特定的區域執行合作監視、信息采集等任務。
與陸地無線傳感器網絡相比,目前水下無線傳感器網絡主要使用數字聲通信手段,由于海洋信道傳輸特性的影響,使得水下無線傳感器網絡發展的受限因素很多[2~7],主要體現在以下幾個方面:1)海洋水聲信道帶寬有限、傳播時延大且易變、多徑和多普勒效應比較嚴重。2)水聲信道的間斷性要求水下傳感器節點具有一定的儲存空間來緩存數據。3)由于節點間較長的傳輸距離和接受端復雜的信號處理,水下傳感器節點獲得信息的相關性小,且消耗的能量遠遠高于陸地傳感器節點通信所消耗的能量。4)水下傳感器網絡節點的能源供給采用一次性耗盡型能源,單個節點的功耗直接影響到整個網絡的壽命。5)由于傳感器節點能量有限,無法實現復雜的加密算法,增加了被竊密的可能性,還有在軍事應用中,節點很可能被占領。因此,惡意的攻擊不僅來自網絡外部,而且可能從網絡內部產生,安全性面臨更加嚴峻的挑戰。由于能量對于水下無線傳感器網絡來講至關重要,最大限度的節省能源成為節點設計、網絡拓撲結構以及網絡協議需要考慮的首要目標。文獻[8]基于SMAC原型提出了同步 MAC樣機.它工作在‘sleepwake’模式下,并保持在接受/發射同步的同時降低每個節點的功耗和避免信息間的干擾。文獻[9]提出了一種超低功耗的 RMAC樣機。文獻[10]提出了 TLohiMAC樣機,該樣機雖然工作在‘sleepwake’模式下,但它需要用超低功耗的接收機喚醒節點。
本文提出的用于水下傳感器網絡節點的超低功耗遠程接入系統采用抗干擾能力強的直接序列擴頻(DSSS)技術、低功耗的“sleepwake”工作模式與設計的高性能、超低功耗遠程接收機相結合的方式。設計的系統,功耗低、安全保密,實現遠程配置。可實現對于單個或多個水下傳感器節點網絡的遠程配置。如在不需要使用網絡的情況下,通過該系統遠程關閉網絡,以節省能源。或者是通過該系統遠程實時修改網絡的各項運行參數,以適應新的任務需要。出于信息保密的考慮,系統使用了擴頻技術,避免了其他未授權用戶獲取網絡的使用權。
2 系統結構

圖1 系統結構框圖
如圖1所示,該系統由接收機模塊、A/D模塊、傳感器模塊、數字處理模塊及通訊模塊構成。接收機模塊及A/D模塊用于原始信號的預處理及數字化;傳感器模塊用于感興趣物理量的采集及數字化;通訊模塊用于通訊協議轉換;數字處理模塊用于模塊內工作流程管理、通信信號參數解算、傳感器數據存儲及MAC協議的執行。
3 系統硬件設計
為了實現系統低功耗設計,除使用低功耗器件外,還采用“sleep/wake”的工作體制。當數據需要處理時,系統各模塊均處于工作狀態,便于實時處理數據,此時功耗達到最大值;數據處理完畢后系統轉入休眠狀態,此時大部分模塊處于低功耗工作狀態,功耗達到最低值;休眠狀態和工作狀態之間的轉換由系統內部中斷或外部信號觸發實現。系統硬件設計如圖2所示。
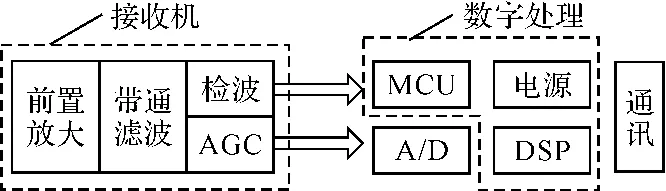
圖2 系統硬件框圖
3.1 接收模塊
接收機模塊主要由換能器、前置放大、帶通濾波、AGC控制,檢波模塊五部分構成。接收模塊的任務是對接收到的微弱信號進行適當的濾波、放大檢波等調理,為A/D提供平穩的、適合采樣的信號。
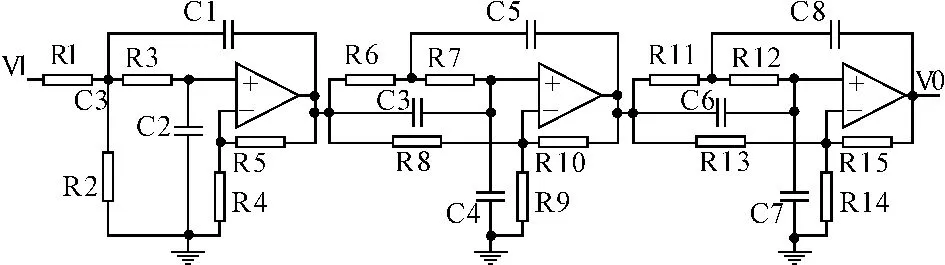
圖3 六階橢圓函數低通濾波器
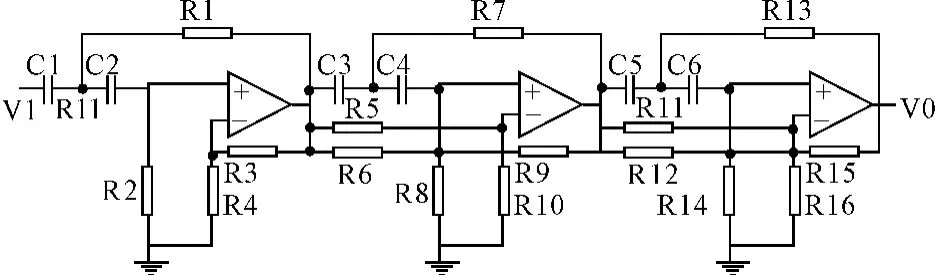
圖4 六階橢圓函數高通濾波器
系統的接收機模塊靈敏度高、噪聲低、工作穩定,可檢測0.5μV微弱信號。接收機模塊的低功耗與高性能主要體現在帶通濾波器的設計和低功耗、低噪聲運算放大器的選擇上。接收機帶通濾波器由六階橢圓函數的低、高通濾波器組成(圖3、圖4所示)。六階橢圓函數低通濾波器由一節二階的VCVSLPF和一節四階的低通陷波器組成。六階橢圓函數高通濾波器由一節二階的VCVSHPF和一節四階的高通陷波器組成。
由六階橢圓函數低、高通濾波器組成的帶通濾波器在結構上減少了運算放大器的整體使用個數,降低了功耗,整個接收機模塊需要14個放大模塊,一個晶體管,總功耗0.3μW;(接收模塊采用Ti的低功耗低噪聲的運算放大器2832和晶體管3DM3C)。在性能上實現通帶平坦,過渡帶陡峭的窄帶濾波。系統樣機帶通濾波器的實測結果如圖5所示:
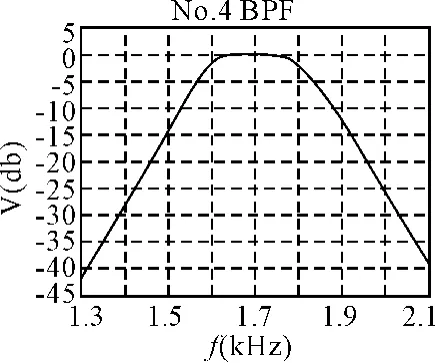
圖5 系統樣機帶通濾波器的實測結果
實現帶通濾波器指標:
1)帶 寬:ΔB0=240Hz(3dB 帶 寬 2.580KHz~3.820KHz),衰減變化≤1.5dB;
2)阻帶衰減:-35dB~-45dB,阻帶2.63KHz~3.33KHz,3.07KHz~3.77KHz;
3)過渡帶寬:100Hz~250Hz。
3.2 數字處理模塊
數字處理模塊是整個信息接收系統的核心,它負責數據的采集與處理,模塊工作流程管理。出于功耗和穩定性的考慮,選擇了在信號處理領域中廣泛應用的超低功耗MCUMSP430F5438和低功耗 DSPTMS329VC5509A 為核心的設計方案。MCU與DSP間的數據交互采用高速SPI協議。為了是降低功耗和簡化數字處理模塊與模擬預處理模塊間的接口,A/D模塊采用微功耗、小型 A/DADS7866,檢波輸出信號則通過MCU自帶的片上A/D模塊采集。
在軟件方面,采用目前應用較為廣泛的直接序列擴頻系統(DSSS)。直接序列擴頻系統是將要發送的信息用偽隨機序列(PN序列)擴展到一個很寬的頻帶上去,在接收端,用與發射擴展用的相同的偽隨機序列對接收到的擴頻信號進行相關處理,恢復出原來的信息。干擾信號由于與偽隨機序列不相關,在接收端被擴展,使落入信號頻帶內的干擾信號功率大大降低,從而提高系統的輸出信噪比,達到抗干擾的目的。直擴系統的接收端最好先進行解擴然后再解調,因為信號在信道中傳播會有很大的衰減。未解擴前的信噪比很低,甚至信號被淹沒在噪聲中。一般解調器難以在很低的信噪比條件下正常解調,會導致高誤碼率。先進行解擴,可以通過解擴過程獲得擴頻增益,提高接收信號的信噪比,然后再進行解調,以保證通信的質量和可靠性。
數字處理模塊硬件框圖如圖6所示。MCU主要負責各模塊上電控制、工作流程控制、工作狀態轉換控制。通信信號的解調、復雜數字信號處理算法的運算、MAC協議的處理等主要由DSP負責。MCU和DSP可根據不同的處理應用通過軟件設定合適的配置,達到降低功耗的目的。
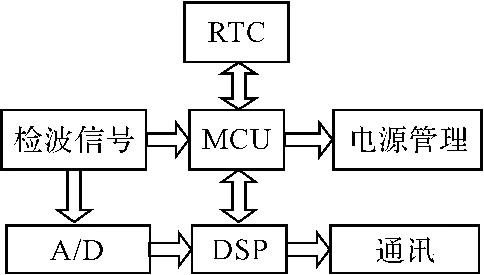
圖6 數字處理模塊硬件框圖
數字處理模塊的工作流程見圖7。當系統處于休眠狀態時,MCU、DSP處于休眠狀態,此時MCU與DSP的理論功耗值分別為3μW(25oC)、120μW(25oC),其他器件處于掉電狀態。因此數字處理模塊處于休眠狀態時消耗功耗的理論值為123μW。當檢波中斷,DSP、MCU被喚醒,DSP與檢波信號同步,隨后進行解碼,然后對所得到的信息進行判別輸出。
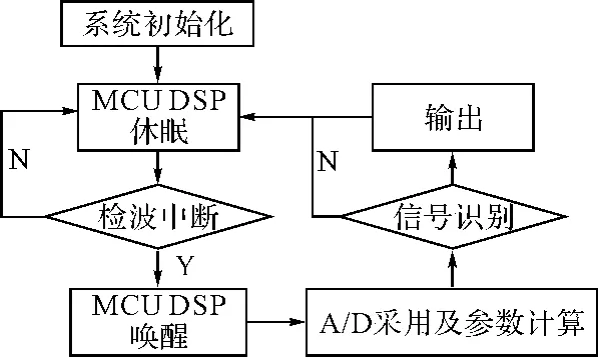
圖7 數字處理模塊工作流程圖
4 實驗
超低功耗遠程接入系統樣機硬件工作完成以后,在西北工業大學航海學院消聲水池對原理樣機系統進行了測試。樣機系統整體照片如圖8所示。
圖8 樣機系統整體照片
實現的設計指標:
1)接收機靈敏度:0.5μV;
2)接收機動態范圍:60dB;
3)工作帶寬:1.6KHz~1.8KHz;
4)阻帶衰減:≥33dB;
5)接收機通帶紋波:≤1.5dB;
6)接收機功耗:0.8mW;
7)數字處理模塊功耗:0.6mW(sleepmode);100mW(workingmode)。
5 結語
研究結果表明設計系統樣機采用合理的工作體制以及低功耗器件,可以有效地降低節點功耗,提高水下傳感器網絡壽命;設計的超低功耗、高性能窄帶濾波器,提高了接入系統的微弱信號檢測能力。該系統的主要性能與作用:1)超低功耗。用戶可以根據需求,實時開啟或關閉網絡,最大限度節省能量資源;2)采用3.5KHz以下頻段,傳播距離遠。可用于遠程配置網路,改變網絡的工作方式等;3)選用CDMA通信,已有文獻表明,CDMA通信在抗水聲信道多徑以及衰落方面有著良好性能,保密性好,可為多個遠距離的水下傳感器網絡提供一個安全的、可靠的信息交互途徑。該系統還可用于使自主水下無人航行器(UUV或AUV)等移動式節點通過遠程接入系統方便的加入網絡。消聲水池的24小時不間斷測試表明樣機系統可以可靠工作,系統達到低功耗、遠距離及保密的預期性能。
[1]J.Heidemann,Wei Ye,J.Wills,A.Syed,Yuan Li.Research challenges and applications for underwater sensor networking[C]//Wireless Communications and Networking Conference,2006,1:228235.
[2]I.Akyildiz,D.Pompili,T.Melodia.Underwater acoustic sensor networks:Research challenges[J].Ad Hoc Networks Journal,Elsevier,2005,3(3):257279.
[3]E.M.Sozer,M.Stojanovic,J.G.Proakis.Underwater acoustic networks[J].IEEE J.Ocean.Eng,2000,25(1):72–83.
[4]Michele Zorzi,Paolo Casari,Nicola Baldo,Albert F.Harris.EnergyEfficient Routing Schemes for Underwater Acoustic Networks[J].IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS,2008,26(9).
[5]I.F.Akyidiz,D.Pompili,a.T.Melodia.Underwater acoustic sensor networks:research challenges[J].Ad hoc networks,2005,3(3):257279.
[6]Jurdak R,Lopes C V,Baldi P.Software Acoustic Modems for Short Range Mote based Underwater Sensor Networks[J].IEEE Conference OCEANS,2006:17.
[7]Casari P,Lapiecirella F E,zorzi M.A Detailed Simulation Study of the UWANMAC Protocol for Underwater Acoustic Networks[J].IEEE Conference OCEANS,2007,16.
[8]Min Kyoung Park,V.Rodoplu.UWANMAC:An EnergyEfficient MAC Protocol for Underwater Acoustic Wireless Sensor Networks[J].Oceanic Engineering,2007,32(3):710720.
[9]Peng Xie,JunHong Cui.RMAC:An EnergyEfficient MAC Protocol for Underwater Sensor Networks[C]//Wireless Algorithms,Systems and Applications,2007.WASA 2007.International Conference Aug,2007:187198.
[10]A.A.Syed,Wei Ye,J.Heidemann.TLohi:A New Class of MAC Protocols for Underwater Acoustic Sensor Networks[C]//INFOCOM 2008,The 27th Conference on Computer Communications,2008:231235.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32