基于遺傳算法的大口徑艦炮武器系統功能構件組合優化*
2013-08-10 09:04:00周德超胡文軍胡獻君古華棟
艦船電子工程 2013年8期
周德超 胡文軍 胡獻君 古華棟
(海軍工程大學電子工程學院 武漢 430033)
1 引言
高技術戰爭條件下的海戰場具有環境復雜、任務多樣化等特點,作為艦艇主戰裝備之一的大口徑艦炮武器系統必須要能夠根據作戰需求和資源狀況,動態調度武器系統功能構件,以最佳的配置方案完成任務。在大口徑艦炮武器系統的作戰流程中,需要各個作戰節點相互合作,而各個作戰節點可能存在部分功能相互重疊。因此在大口徑艦炮武器系統使用的過程中,需要將系統分解為多個功能構件,根據執行的作戰任務選擇最優的功能構件組合,以形成可用于作戰決策的綜合指標良好的武器系統配置方案。
2 大口徑艦炮武器系統功能構件分解
2.1 大口徑艦炮武器系統作戰流程分析
大口徑艦炮武器系統作戰流程為[1]:艦艇預警系統搜索發現目標,形成目標航跡數據,并將目標航跡數據發送給作戰指揮系統。作戰指揮系統對目標航跡進行綜合識別和威脅判斷后,向大口徑艦炮武器系統下達目標指示。大口徑艦炮火控系統接收到目標指示命令和相應的數據后,跟蹤傳感器立即對指定的目標進行捕獲、跟蹤,不斷精確地測量目標坐標,并自動向火控計算機提供目標坐標數據。火控計算機接收到跟蹤傳感器傳來的數據的同時,還接收導航系統傳來的本艦運動和姿態參數、接收或裝定的彈道氣象參數,按照射擊指揮員給定的射擊計算方式,準確計算出目標運動參數和命中所需的射擊諸元,連續地向武器瞄準系統發送射擊諸元并帶動武器對目標進行射擊。通過測量或檢測出彈目偏差,求取射擊校正量即將發射彈丸的射擊諸元,以期命中目標。最后對射擊效果進行評估。
2.2 大口徑艦炮武器系統功能分解
功能分析是大口徑艦炮武器系統構件化的基礎工作,通過功能分析,明確系統應具備的功能,劃分出合理的系統功能塊,如圖1所示。
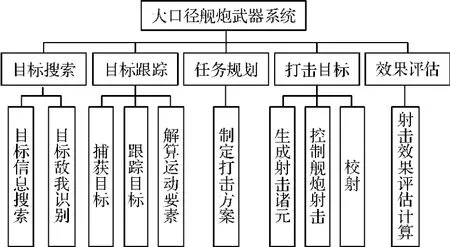
圖1 大口徑艦炮武器系統功能分解
通過系統功能分解,得到武器系統功能構件集合(目標信息搜索構件A1、目標敵我識別構件A2,捕獲跟蹤目標構件A3、解算目標運動要素構件A4、生成打擊方案構件A5、生成射擊諸元構件A6、控制艦炮射擊構件A7、校射構件A8、射擊效果評估計算構件A9)。
3 大口徑艦炮武器系統構件性能約束
3.1 功能模塊間的邏輯控制關系
構成武器系統流程的基本構件之間存在一定的邏輯控制關系,構成了武器系統組合過程中的相互約束。常見的邏輯控制關系包括順序關系、分支關系、并行關系、自循環關系四種[2],如表1所示:
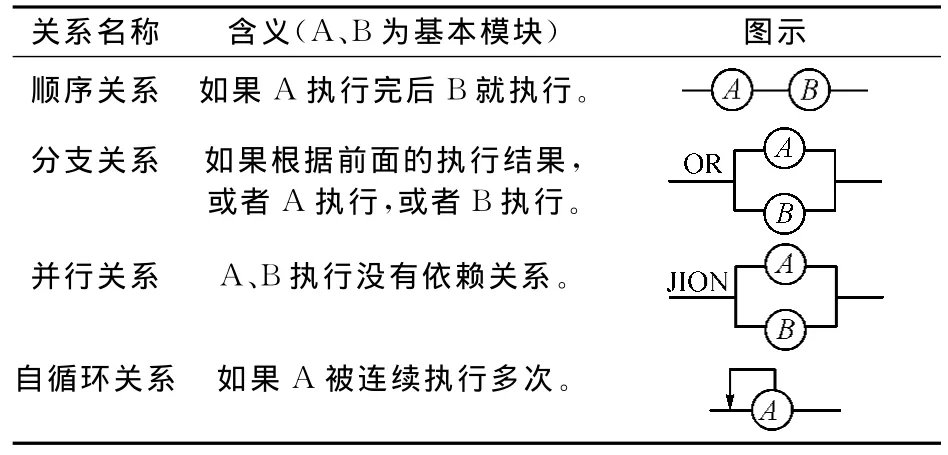
表1 構件間邏輯控制關系表
3.2 執行路徑和順序路徑
在研究中,我們定義兩種類型的路徑,執行路徑和順序路徑[2]。
1)執行路徑:從起始功能節點到終止功能節點的一條路徑,在分支關系處選擇一條分支,在并行關系處選擇所有分支。
2)順序路徑:從起始功能節點到終止功能節點的一條路徑,但在分支或并行關系處都只選擇一條分支,因此如果執行路徑中包含并行關系,那么執行路徑可拆分成多條順序路徑。
3.3 構件性能約束指標
1)系統射擊精度
火炮武器系統的射擊精度可以直接用綜合概率誤差(EX∑ ,EZ∑ )表示[3]。

式中:Ed0、Ez0為單炮散布距離、方向概率誤差;Edm、Ezm為隨動系統距離、方向概率誤差;Edvo為確定初速偏差引起的距離概率誤差;Edρ為確定空氣密度偏差引起的距離概率誤差;Edw、Ezw為確定風速偏差引起的距離、方向概率誤差;Edg、Ezg為觀測設備誤差引起的距離、方向概率誤差;Edc、Ezc為指揮儀誤差引起的距離、方向概率誤差;Cd、Cz為艦炮單炮散布經驗修正系數。
2)系統反應時間
艦炮武器系統的反應時間規定為:從搜索雷達發現目標開始,到武器完成第一發彈丸射擊出炮口為止的時間[4]。

式中:t(ai,cij)為在完成任務ai時選擇構件cij的延遲,M為順序路徑上的功能節點數目(下同),T為構件組合的總體反應時間。如果執行路徑可以拆分成多條順序路徑,則取各順序路徑中反應時間的最大值。
3)系統最大射擊區域半徑[5]

式中:d(ai,cij)為在完成任務ai時選擇構件cij的最大射擊區域的半徑,D為構件組合的系統最大射擊區域的半徑。如果執行路徑可以拆分成多條順序路徑,則取各順序路徑中系統最大射擊區域半徑的最小值。
4)系統可靠性

式中:r(ai,cij)為在完成任務ai時選擇構件cij的可靠性,R為構件組合的總體可靠性。如果執行路徑可以拆分成多條順序路徑,則取各順序路徑中可靠性的最小值。
4 大口徑艦炮武器系統功能構件組合優化建模
4.1 大口徑艦炮武器系統功能構件組合優化框架
大口徑艦炮武器系統功能構件組合優化框架由三部分組成,如圖2所示。
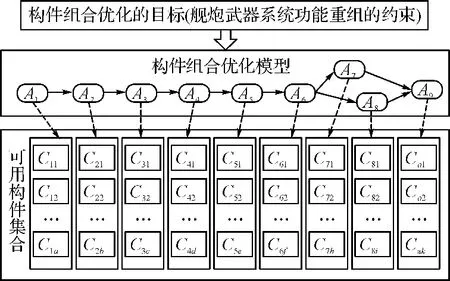
圖2 艦炮武器系統功能構件組合優化框圖
1)功能構件組合優化的目標。大口徑艦炮系統功能構件組合優化的目標體現為作戰任務對功能構件組合的約束(主要包括系統精度、反應時間、最大射擊區域半徑、可靠性)。為保證任務的有效性,指揮員將會根據作戰需求,對構件組合的系統配置方案提出全局要求。比如決策者要求方案總體反應時間最多為10s,可靠性達到9.5以上等等。
2)功能構件組合優化模型。可以將構件組合模型用任務工作流進行描述。任務工作流S= (A,R,Q)。其中表示工作流中的功能節點,R∈A×A是功能節點之間關系的集合,表示作戰任務構件的屬性值,主要包括構件反應時間、作為誤差源產生的精度、最大射擊區域半徑和可靠性。
3)可用構件集合。針對構件組合優化模型中的每個節點,可能存在多個滿足其功能需求的構件實例。在面向構件的環境中,這些構件實例可能是基于不同技術實現的(如獲取目標信息的手段有雷達、無人機、衛星等)。
4.2 功能構件組合路徑優化選擇
功能構件組合路徑選擇優化主要是基于構件組合優化的目標,從大量可用的功能構件集合中選擇一條能夠滿足用戶需求的構件執行路徑。系統是相互作用和互相依賴的若干組成部分結合而成的具有特定功能的有機整體。從系統的角度考慮,單純提高某項性能指標而不是恰當地最優匹配各項性能指標,是不可能顯著提高整個大口徑艦炮武器系統整體作戰能力的[6]。所以,在大口徑艦炮武器系統工作的執行路徑上,需要對功能相同但性能參數不同的構件進行選擇,最優地匹配各項性能指標,以適應作戰任務、環境和資源變化的需要。指揮員根據作戰需要定義構件組合的精度上限Ei、反應時間上限Ti、最大射擊距離上限Di和可靠性下限Ri,產生的目標函數如下所示:

5 基于遺傳算法的組合優化模型求解
組合優化屬于NP難問題,線性規劃和遺傳算法是兩種常用的求解方法。線性規劃方法雖然能夠求得最優解,但是隨著問題規模增大,求解性能下降明顯。遺傳算法是一種現代仿生學算法,在求解組合問題中取得了較為理想的效果。本文常用遺傳算法。
遺傳算法是一種基于自然選擇和群體遺傳機理的搜索算法,它模擬了自然選擇和自然遺傳過程中發生的繁殖、雜交和突變現象。遺傳算法是一個迭代過程,在每次迭代中都保留一組候選解,按其解的優劣進行排序,并按某種指標從中選出一些解,利用遺傳算子對其進行運算,產生新一代的一組候選解,重復此過程,直到滿足某種收斂指標為止[7]。其算法框架如圖3所示。

圖3 遺傳算法的基本流程圖
5.1 染色體編碼
本文采用二進制編碼,每條染色體表示武器系統的一個配置方案,染色體代碼串包括若干基因段,基因段對應執行路徑上各節點的構件選擇情況,第i段基因表示組合路徑中的節點Ai所選擇的候選構件編號ID,ID∈[1,ni]。如圖4所示,其組合路徑為C12→C21→C34→C43→C51。
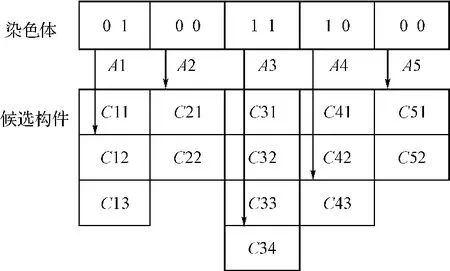
圖4 一個功能構件配置方案
5.2 適應性函數設計
組合優化的目標要考慮到組合方案的各項性能指標及權重,其中系統精度和反應時間越小越好,而系統可靠性和最大射擊區域半徑的數值則是越大越好,所以優化目標函數定義如下:

式中:wi(1≤i≤4)為各指標的權重,且E′為與E增長趨勢相反的一個導出值,T′的情況類似。
因為不同種性能參數或不同節點的性能參數之間可能相差巨大,并且考慮到不同性能參數對功能評價的影響可能相反,所以需要先對最初的各性能指標值進行標準化,式(8)如下所示:
1)當Q越小越好時,如系統精度和反應時間。

2)當Q越大越好時,如系統最大設計區域半徑和可靠性。

用式(8)(9)標準化原來構件組合各指標值,用結果替換式(7)中的各指標值,構成新的優化目標函數F′。
在進化過程中可能會出現非法解或違反約束條件的情況,采用罰函數法處理。構造懲罰函數的思想是當前解的各項指標越接近約束條件,懲罰力度越小,反之,懲罰力度越大,當滿足約束條件時,則不懲罰。適配值函數如式所示
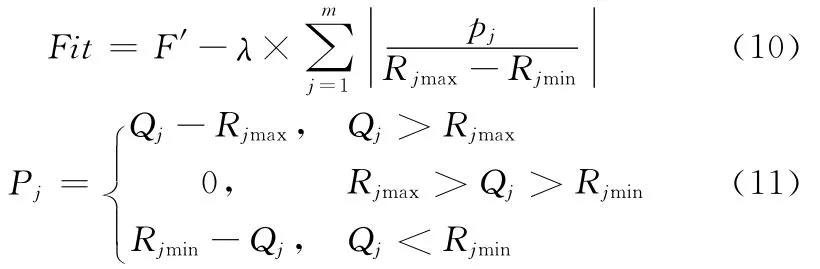
式中:λ為經驗常數,m為約束條件的個數,Rjmax、Rjmin為構件組合的第j個約束條件的最大、最小估計值。
5.3 其他步驟
本文采用精英選擇和輪盤賭選擇相結合的策略、單點交叉方式,采用最大迭代次數法則作為終止條件,并將具有最大適應度的個體作為最優解。
6 仿真計算與結果分析
為了驗證本文所提出方法的可行性和有效性,進行了仿真實驗。仿真程序在各節點上隨機生成指定數目的候選構件(各構件的性能指標在設定的合理范圍內生成)。實驗環境為:CPU AMD Athlon(tm)64×2Dual Core Processor 4400+2.31GHz;內存2.0GB;操作系統Windows XP Professional SP3;仿真工具MATLAB 7.8。實驗方法:本文采用大粒度的功能構件,配置方案的形成過程中主要對觀測設備、火控解算和炮彈候選構件進行選擇,按照規則隨機生成構件組合配置方案,設定節點數目、各節點所包含候選功能構件的個數、以及各候選功能構件的性能指標參數,計算各綜合指標值,并將其轉化為最優化問題,而后采用遺傳算法解決該問題。
實驗參數:用戶定義的指標約束:用戶要求的系統距離和方向精度上限分別為70m和30m,反應時間上限8s、系統最大射擊區域半徑下限35km、系統可靠性下限0.92。優化目標中各指標權重:系統精度0.3,反應時間0.3、系統最大射擊區域半徑0.2、系統可靠性0.2。交叉概率為0.7,變異概率為0.1。
當各節點的候選構件數為10、30時,隨機運行一次的結果分別如圖5、6所示。通過仿真,可以得到如下結論:隨著遺傳代數的增加,適應值增大,最后趨于穩定;選擇構件數增多時,適應值增大。
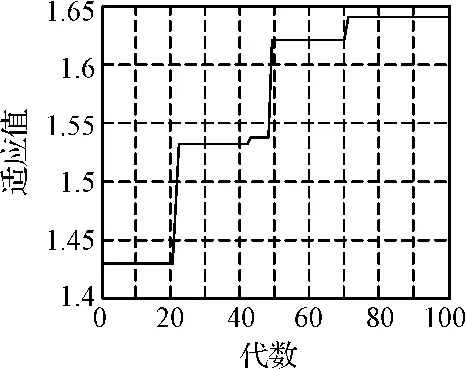
圖5 候選構件數為10時,隨機運行一次的結果
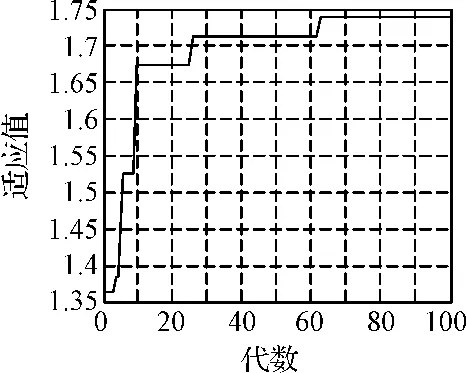
圖6 候選構件數為30時,隨機運行一次的結果
當節點上構件數目依次按5,10,15,20,30,40,50遞增時,運行次數50次,取平均值,算法計算結果如表2所示。
表2 遺傳算法的試驗結果
實驗結果表明隨著節點上可供選擇的基本構件數增多,解的適配值逐漸增大,計算時間逐漸增加。符合隨著構件選擇機會增多解逐漸優化,但計算復雜度增大。
文獻[2]中,使用禁忌搜索算法求解 Web服務組合問題,在超出本文算法的時間內求得最優解(運算時間數量級相同,如服務數為10時,耗時345ms),考慮文獻[2]中實驗平臺性能略低,本文節點相對校少,且迭代參數設置會對運算時間造成影響,所以說本算法效果是可以的。
7 結語
針對大口徑艦炮武器系統功能構件重組問題,本文將系統精度、反應時間、可靠性和最大射擊區域半徑作為衡量功能組合方案的重要指標,提出了一種功能構件組合優化方法。實驗結果表明,本文算法結果是可行有效的。下一步的工作主要是結合具體的大口徑艦炮武器系統功能構件,明確各個構件的功能屬性和指標參數,更好地服務于大口徑艦炮武器系統的作戰使用和輔助決策。
[1]王航宇,王士杰,李鵬.艦載火控原理[M].北京:國防工業出版社,2006:45.
[2]董宗然,李迎秋,陳明華.基于禁忌搜索算法的web服務組合優化[J].計算機工程與設計,2010,31(5):942945.
[3]郭錫福.遠程火炮武器系統射擊精度分析[M].北京:國防工業出版社,2004:95102.
[4]衛愛萍,王士杰,等.現代艦艇火控系統[M].北京:國防工業出版社,2008:8083.
[5]邢昌風,李敏勇,吳玲.艦載武器系統效能分析[M].北京:國防工業出版社,2007:4547.
[6]邢昌風,陳棟,劉高峰.艦炮火控系統反應時間與精度關系的仿真[J].火力與指揮控制,2003,28(3):4244.
[7]王濤.遺傳算法及其應用[J].新鄉學院學報,2008,25(1):5658.
[8]張成文,蘇森,陳俊亮.基于遺傳算法的QoS感知的Web服務選擇[J].計算機學報,2006,29(7):10291036.
[9]古凌嵐,孫素云.基于遺傳算法的組合服務選擇方法[J].計算機工程與設計,2011,32(11):38773880.
[10]楊溢龍,王偉茹,楊靜.基于遺傳算法 Web服務組合的一般過程[J].計算機與數字工程,2012,40(7).
[11]方周,陳榮平,蔡美玲.遺傳算法在 Web服務組合中的應用[J].計算機與現代化,2007(12):118121.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20