無砟軌道路基靜壓式沉降監測系統及其標定
2013-08-04 06:34:14羅麗萍董勇峰朱洪濤胡志新
鐵道標準設計 2013年5期
關鍵詞:系統
羅麗萍,董勇峰,朱洪濤,胡志新
(南昌大學機電工程學院,南昌 330031)
無砟軌道因其具有軌道幾何變形小、軌道平順性好、結構可靠性高、維修工作量少等特點,在高速鐵路得到廣泛應用[1-2]。路基作為軌道的基礎,路基是鐵路的重要組成部分[3]。客運專線無砟軌道對路基工程的工后沉降要求嚴格,雖然在初始設計中對土質路基進行了沉降變形計算,并采取了相應的設計措施[4-6],但是影響沉降計算的因素非常多,使得沉降計算的精度不足以控制無砟軌道的工后沉降,而路基的沉降影響鐵路運行的安全性和平順性。為保證客運專線無砟軌道的工程質量和列車安全、平穩、舒適的運行,監測和控制沿線方向構筑物的差異沉降是路基工程的一個關鍵環節[7-8]。路基工后沉降是高速鐵路路基工程重點研究的內容之一,路基工程質量的成敗也主要取決于對路基沉降及工后沉降的監測和控制。
目前典型的沉降監測系統主要有水管式沉降儀[9],水管式沉降儀是利用連通管原理來觀測監測點的沉降。根據連通自由液體不同高程點存在液面差的原理來監測路基沉降的方法具有可聯網、能連續自動化監測、精度較高的特點,但采用自由液體時依然存在受環境影響大、動態響應慢、現場施工困難、維護成本高、占用場地大等問題,不利于惡劣環境的應用和沉降突發狀況的及時處置,同時也會對施工造成較大影響,后期維護工作量也會較大。
靜壓式沉降監測系統是一種用于監測被測對象沉降量的監測系統,可用于鐵路路基等大型建筑物沉降的實時監測。靜壓式沉降監測系統中的壓力在密閉液體中傳播速度近似聲速,路基沉降值可通過系統里的壓力變化顯示出來,其動態響應高;直接以沉降值輸出為最終輸出,不存在中間轉換計算誤差,很好地提高監測系統的精度;具有自動監測和超限報警,精度高,動態響應快,不影響現場施工等特點。
1 靜壓式沉降監測系統原理
1.1 靜壓式沉降監測系統的構成
無砟軌道路基沉降監測系統主要由2個工作測頭、1個基準測頭、液體加注口以及排氣口等組成。系統構成如圖1所示。設置液體加注口應當略高于排氣口。基準測頭通過連通管與工作測頭聯通,通過液體加注口給系統添加液體介質,系統內空氣經由排氣口排出,形成密閉液體。基準測頭應設置在穩固、可靠、不易被破壞和便于測量的地方,并采取防凍、防沉降和抗移動處理,其基座設為0號,1號工作測頭和2號工作測頭分別埋設在路基、橋涵、隧道及過渡段等需要監測的位置,其基座設為1號基座和2號基座。
基準測頭的功能是監測系統由于受到溫度、氣壓變化或管路擠壓等外界因素變化引起的壓力變化值,工作測頭是監測其對應基座沉降時和外界因素變化引起的壓力變化值。基準測頭和工作測頭所測的信號經過信號線傳至管理計算機,基準測頭和工作測頭的壓力變化差值即是對應的路基因沉降引起的壓力變化值,管理計算機經過數學處理將工作測頭所測的沉降值顯示及存儲起來。系統能同時監測2個基座的實時沉降值,可以根據實際需要增加或減少工作測頭的數目。

圖1 無砟軌道路基沉降監測系統示意
1.2 靜壓式沉降監測系統原理
帕斯卡原理[10],盛放在密閉容器內的液體,其外加壓力發生變化時,只要液體仍保持其原來的靜止狀態不變,液體中任一點的壓力均將發生同樣大小的變化。
根據帕斯卡原理,當密閉容器內的液體某一點受到由溫度、氣壓變化或者管路受到擠壓等外界因素引起的壓力變化時,液體相對于容器并不產生相對運動,該點壓強變化會等值地以近似聲速傳遞到各點,迅速使密閉容器內各處的壓強都發生同樣大小的變化,但由于重力的原因,密閉容器內靜止液體不同高程點仍然存在與高程差成正比的壓力差Δp,即

式中,Δh為高程差,m;ρ液為液體的密度,kg/m3;g為重力加速度。
現實環境存在各類噪聲,如氣溫、氣壓變化等,皆能以共模形式影響著系統輸出。為此,監測系統采用差動驅動提高共模抑制比,即利用密閉液體中壓力差來監測不同沉降點高程差變化。當設基準測頭沉降為零,工作測頭隨其對應的路基發生沉降時,其基準測頭和工作測頭之間高程差變化就是工作測頭監測沉降點的沉降值,通過基準測頭和工作測頭里的壓力變化差值表現出來,即

式中,Δh基為基準測頭的高程差,m;Δp基為基準測頭的壓力差,N/m2;Δh-Δh基為工作測頭所監測的沉降值,m。
其基準測頭的高程沉降是由于現實環境中的各種噪聲引起的壓力變化所換算出來的,并不是基準測頭所發生的沉降。
由液體靜力學可知,密閉液體中壓力的傳遞速度接近于液體中的聲速,遠大于機械擺或液體擺等受重力的影響而產生的機械運動的速度[11-12],故其頻響明顯高于各類基于液面差的水管式沉降監測,明顯提高了系統的動態響應。
2 靜壓式沉降監測系統的標定原理
2.1 靜壓式沉降監測系統的標定原理
在明確輸入-輸出變換對應的前提下,利用某種標準量或標準器對傳感器的量值進行標度稱之為標定[13]。為確定沉降監測系統的輸入-輸出關系,消除系統誤差并提高測量的精度,需要對監測系統進行標定。
由圖1可知,沉降監測系統包含2個工作測頭,每個工作測頭能夠監測1個點的沉降。為了最大消除工作測頭之間由溫度、氣壓變化等偶然因素引起的誤差,采用對沉降監測系統的每個工作測頭同時標定方法,即在標定讀數過程中,同時讀取每個工作測頭的數值。
基準測頭與工作測頭采用差動連接的方法能夠消除由于濕度、溫度等外界因素引起沉降監測系統內壓力的波動。雖然系統內的每個測頭會因某些外界因素改變其輸出值,但是,同樣的壓力改變值會傳遞到每個測頭,通過工作測頭與基準測頭的壓力變化差值來計算每個工作測頭所測到的實際沉降值,消除了由外界因素引起的誤差。
2.2 靜壓式沉降監測系統的標定方法
每個測頭中的壓力傳感器雖然在出廠時就標定好了,但是每個測頭在生產、裝配等過程中存在誤差。由式(2)可知,無砟軌道路基沉降監測系統的輸入-輸出是線性的。為了使擬合直線在全量程范圍內擬合精度高,盡量減少使用時的測量誤差,采用一元線性回歸法來擬合輸入-輸出的關系,使整個標定過程中誤差的平方和Q最小。
設定沉降監測系統中測頭的一元線性回歸的回歸方程為

式中,k、z是回歸方程的回歸系數;x為測頭壓力變化的差值為壓力的回歸值,Pa。
設在全量程內取N個標定點,用矩陣表示,令
式中各矩陣元素
υ1,υ2,…,υN為 N 個直接測量結果的殘余誤差;
y1,y2,…,yN為 N個直接測量結果;
k,z為2個待求的被測量的估計值;1,x1,…,xN為N個誤差方程的N×2個系數。則式(3)的矩陣形式為

根據最小二乘法原理,回歸系數的矩陣解為

將 Y、X、b、V 代入式(5),解得 z,k,即

將式(6)和式(7)代回式(3),得標定后的回歸方程為

3 實驗與結果分析
為驗證本沉降監測系統標定方法的合理性,本文設計了相應的實驗方案并進行了驗證。
實驗方案系統構成如圖1所示,其中采用蒸餾水作為工作介質。常溫室內條件下,基準測頭及工作測頭置于升降臺上并精確找平。采用0.05級活塞式壓力計以得到標準的輸入量,每個測頭通過數據采集電路采集壓力傳感器的信號并上傳到管理計算機。通過給系統持續加壓,記錄每個測頭的輸出值,可得不同壓力條件下的輸出{xi|i=1,2,…}。為減小偶然誤差,測試在重復性條件下連續進行7次并求平均值,其平均值ˉxi作為當前壓力下系統的輸出。得到輸入-輸出關系如圖2所示。
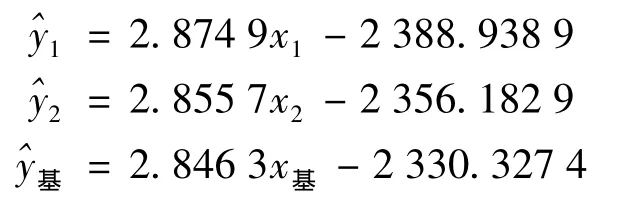
由圖2和式(8)得到基準測頭、1號工作測頭與2號工作測頭的輸入-輸出方程分別為
無砟軌道路基沉降監測系統使用不同的標定方法所得的結果存在差別,標定結果是否提高了其精度可使用一種常用的方差分析法,其實質是對N個觀測值與其算術平均值之差的平方和進行分解,將對N個觀測值的影響因素從數量上區分開,然后用F檢驗法對所求回歸方程進行顯著性檢驗[14]。
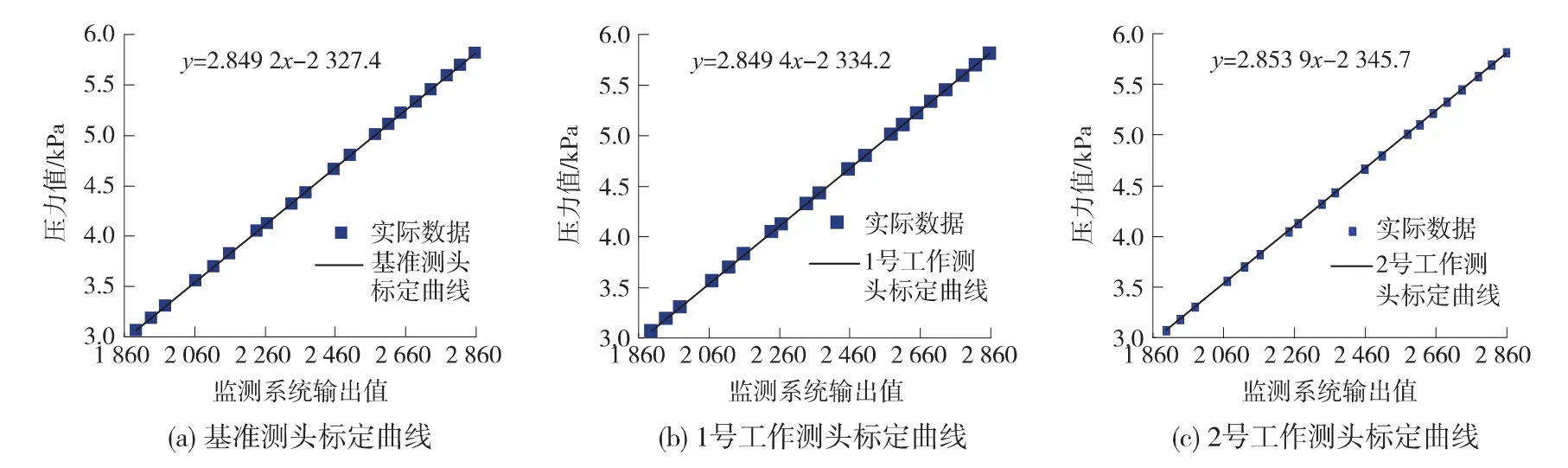
圖2 沉降監測系統各測頭標定曲線
回歸平方和U反映了在y總的變差中x和y的線性關系,即
殘余平方和Q反映了所有觀測點距回歸直線的殘余誤差的平方和,即

采用F檢驗法檢驗回歸方程式(8)是否顯著,回歸平方和的自由度為1,殘余平方和的自由度為N-2,即

將式(9)和(10)代入式(11)得
將試驗數據代入式(12)得

F1、F2、F基檢驗結果高度顯著,說明1號工作測頭和2號工作測頭的非線性誤差很小,一元回歸方程擬合結果較為理想。
4 結語
本文介紹了無砟軌道靜壓式路基沉降監測系統及其原理,并提出了基于一元線性回歸原理的系統標定方法。理論分析及實驗結果顯示。
(1)靜壓式路基沉降監測系統利用測頭間壓力差測量高程變化,其具有環境變化自動補償、動態響應快、布局簡便、擴展性好及精度較高等特點,適合對無砟軌道路基的自動連續監測。
(2)為得到系統的輸入-輸出關系,提出采用一元線性回歸方法進行標定,一元線性回歸可以有效消除測量噪聲,進而得到模型參數的最可信賴值估計。通過測量數據對線性模型參數的F檢驗,顯示該回歸方程顯著,說明一元回歸方程擬合結果較為理想。
[1]中華人民共和國鐵道部.鐵建設函[2005]754號 客運專線無砟軌道鐵路設計指南[S].北京:中國鐵道出版社,2005.
[2]全順喜,王平,伍曾.客運專線無砟軌道道岔精調系統的研究與應用[J].鐵道標準設計,2010(2):36-39.
[3]郝瀛.鐵道工程[M].北京:中國鐵道出版社,2000.
[4]周詩廣.大跨度橋上鋪設無砟軌道結構設計研究[J].鐵道標準設計,2011(3):1-5.
[5]熊林敦.高速鐵路路基設計中有關問題的回顧與思考[J].鐵道標準設計,2011(8):1-3.
[6]中華人民共和國鐵道部.TB 10621—2009 高速鐵路設計規范[S].北京:中國鐵道出版社,2009.
[7]秦尚林,陳善雄,許錫昌.路基沉降預測的拓展指數曲線模型[J].鐵道標準設計,2010(2):28-30.
[8]李明領,周全能,陳善雄,等.試論鐵路客運專線沉降變形觀測評估工作模式[J].鐵道標準設計,2010(2):7-10.
[9]霍家平,陳生水,姜繼承,等.DCJ-1型電測水管式沉降儀及應用[J].水電自動化與大壩監測,2002(4):41-44.
[10]左健民.液壓與氣壓傳動[M].2版.北京:機械工業出版社,2009.
[11]朱洪濤,鐘愛平.高程差傳感器信號處理[J].傳感器與微系統,2010(6):87-88.
[12]朱洪濤,方華偉,王志勇.一種新型高程差傳感器的研究[J].傳感器世界,2006(1):23-26.
[13]賈伯年,俞樸,宋愛國.傳感器技術[M].3版.南京:東南大學出版社,2007.
[14]費業泰.誤差理論與數據處理[M].4版.北京:機械工業出版社,2000.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
