在高精度要求下的激光導引頭改進設計探究
2013-07-30 04:08:12雷欣
電子測試 2013年10期
雷 欣
(西安歐亞學院,陜西西安 710065)
0 引言
由于激光的單色性好,光束的發散角小,抗自然干擾能力強,同時敵方很難對武器系統實施有效干擾,因而它具有其它制導體制無法匹敵的優點。激光制導能與紅外、雷達、GPS 等結合可實現復合制導,則更有利于提高制導精度和應付各種復雜的戰場環境,從而發揮了全天候作戰的優勢。
由于自然界的物體發出單色性好的激光非常少見,要實現激光被動制導幾乎是不可能的。因此,激光被動制導不能被制導武器系統選用,而需要有導彈以外的激光照射器發射激光束照射到目標上,利用導引頭接收目標的激光反射光制導導彈,這就是激光半主動制導,所需要的導引頭,就是激光半主動導引頭(以下簡稱導引頭系統)。
目前激光半主動導引頭與激光照射器分開配置于兩地,激光半主動導引頭隨導彈飛行,激光照射器置于彈外。另外,激光主動制導是將激光照射器和導引頭都裝在導彈的頭部上,由激光照射器發射激光束照射目標,導引頭接收目標反射激光信號,再通過彈上制導控制系統將導彈引向目標。這就是激光主動制導。這種制導體制有一個致命的缺點,那就是導彈的頭部體積過大,在結構上幾乎就是無法實現。因此激光制導武器,一般地,都不選擇激光主動制導,而是選擇激光半主動制導。
1 導引頭系統組成
1.1 導引頭系統工作表現
激光半主動制導系統工作過程:激光照射器作為信號源裝在地面、車船或飛機上,發射激光束為制導武器指示目標,彈上的激光導引頭接收目標反射激光信號,并跟蹤目標上出現的激光光斑,制導導彈飛向激光光斑(或光點),直至命中目標。
激光半主動制導廣泛應用于各種制導武器系統,例如,射程2km~20km 的激光制導炸彈、激光制導炮彈、激光制導導彈以及射程小于10km 的反坦克導彈等。
本激光半主動引頭系統擬采用外框架平臺式結構(性能指標高),如果發現目標后用地面、他機的激光照射器照射目標,目標激光的反射光通過裝在穩定跟蹤平臺上的導引頭光學系統進入激光探測器,激光探測器的輸出信號,送給信號處理器,其輸出與導引頭光軸偏離目標線的偏差角成比例的信號,此信號通過跟蹤控制器、信號轉換器轉換成與目標視線角速率成比例的信號,送給導彈自動駕駛儀,制導導彈;該信號轉換器的另一路的輸出信號送給平臺系統,驅動平臺轉動,即導引頭光軸轉動,以減小導引頭光軸偏離目標線的誤差角,即實現了導引頭光軸對目標的自動跟蹤。
1.2 激光探測器信號的提取
現在的激光探測器已經有雙四象限、單四象限、三象限和二象限等多種形式探測器組件。例如有的末制導炮彈采用雙四象限探測器。雙四象限探測器再配合自動駕駛儀等動力裝置,可以很方便、可靠的完成導彈制導任務。位于導引頭最前端的雙四象限探測器以及自動增益控制,將是對捕獲目標、判斷目標位置、分析目標狀態信息等的重要組成部分。
1.3 導引頭系統組成定義
導引頭由導引頭光學系統、激光探測器、信號處理器、跟蹤控制器、信臺號轉換器組成。導引頭系統由導引頭、平臺系統組成。平臺系統由平及其框架、控制器、力矩電機、速率傳感器、角度傳感器等組成,見圖1 所示。圖中,
q —目標視線角度;

△q —目標視線與導引頭光軸的偏差角;
U —目標視線角速度信號。
1.4 導引頭系統特點
a.雙四象限激光探測器
雙四象限激光探測器分外區和內區,見圖1 所示。
外區為非線性區,視場:±18°;
內區為線性區,視場:±3°;
b.由信號處理器、跟蹤補償器、信號轉換器等所組成的目標跟蹤器,其主要功用是實現對目標跟蹤;
c.平臺系統,主要功用是使導引頭穩定跟蹤目標。
雙四象限激光探測器的優點:外區為非線性區,即為開關區(有無信號區),視場大,便于捕獲目標,同時開關區的信號量值大,能使導引頭光學系統中心線快速跟蹤目標。內區為線性區,視場小,能使導引頭中心線慢速、穩定跟蹤目標,以便提高跟蹤精度。
激光半主動導引頭是集光、機、電于一體的高技術制導裝置,國內外都在競相開展激光制導開發研究,以求獲得高技術產品服務于制導武器系統,使得武器系統指標有大幅度提升。
1.5 導引頭系統工作原理
導引頭系統由導引頭和平臺系統組成。圖1 開關K1 置于1 的位置,平臺帶動導引頭光軸轉動,使光軸對準目標,并消除光軸偏離目標的角偏差△q;開關K1 置于2 的位置,給平臺系統加搜索信號,可使平臺軸相對彈軸上下、左右轉動到所需要的位置,以及完成對目標的搜索。
導引頭要完成測量光軸偏離目標角偏差△q,并將其變成角偏差電壓信號,經過信號處理、補償和變換,形成控制信號U送給平臺系統,使平臺軸轉動,帶動導引頭光學系統軸轉動,以便消除角偏差角△q,即實現對目標的跟蹤。
2 導引頭系統參考指標
a.雙四象限傳感器,分外區和內區,外區為非線性區,為開關區,內區為線性區;
b.非線性區:±18°,線性區:±3°;
c.導引頭跟蹤角速度
非線性區最大跟蹤角速度:12.0°/s;
非線性區最小跟蹤角速度:6.0°/s;
線性區最大跟蹤角速度:3.0°/s;
d.導引頭穩定跟蹤精度:0.05°;
e.導引頭框架角:±18°。
3 導引頭系統的改進設計
3.1 導引頭工作狀態
3.1.1 導彈發射后,導引頭系統處于機械鎖定狀態,即導引頭鎖定到彈軸上;
3.1.3 當激光探測器收到激光脈沖信號時,經過信號處理器、補償器和轉換器,使開關K1 自動置于1 的位置,由搜索狀態轉換成跟蹤狀態,導引頭跟蹤目標,直到命中目標。
3.2 導引頭工作過程
3.2.1 目標在外四象限內(開關通道),導引頭系統以12.0°/s 角速度跟蹤目標,這樣一來,能使目標的光斑快速地由外四象限進入內四象限(線性通道)內;
3.2.2 目標由外四象限向內四象限過渡時,外四象限處于半封閉狀態。當完全進入線性通道的瞬間,開關通道無信號,線性通道跟蹤角速度6.0°/s;
3.2.3 在外四象限過渡內四象限以后,開關區不工作,線性區工作;
3.2.4 線性通道,最大跟蹤角速度3.0°/s。
3.3 非線性區信號處理
3.3.1 和差處理和輸出信號形成
X 軸向上,為正方向;
Y 軸向右,為正方向;
A、B、C、D 代表探測器外區;
E、F、G、H 代表探測器內區。
3.3.2 目標光斑落到A 區
3.4 線性區信號處理
3.4.1 線性區信號
線性區,見圖1 的內區(E、F、G、H),為方便起見,線性區的表示仍用A、B、C、D 表示。得到目標的信號值與在激光探測器中的面積成正比。
3.4.2 信號提取
3.4.3 線性區信號處理
按目標在內四象限沿X、Y 方向的偏移量進行和差處理
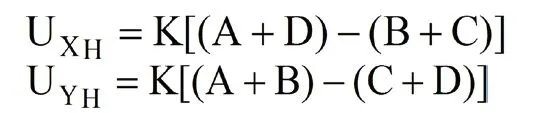
偏移量的總和
UH =A +B +C +D

由此可知,用數字型信號處理器實現上述計算非常容易。
3.5 導引頭增益控制
為了提高跟蹤目標的質量和速度,可以調整導引頭信號處
理器的增益K 之值,即增益控制。如果采用數字信號處理器,可以實現增益K 的任意特性。線性通道可以設置增益控制,開關通道不設置增益控制。
總之,通過導引頭系統設計,可以看出,系統組成比較簡單,容易實現,同時抗干擾能力強,系統精度高,并且能發揮全天候作戰的優勢。所以激光半主動導引頭在各種激光制導武器系統中能得到廣泛的應用。
4 結論
通過對具有雙四象限探測器、平臺式穩定跟蹤方案的激光半主動導引頭組成方案的分析介紹,給出了這種導引頭的應用的廣闊前景。這種導引頭的特點是組成簡單,抗自然干擾和人工干擾能力強,精度高,從而能夠發揮了全天候作戰的優勢。
[1]匡冬權,基于激光導引頭的四象限光電探測器檢測電路研究[J],裝備制造技術2012,2:220-223 KUANG Dongquan.The Research on Laser Seeker for Circuit of Four-quadrant Photo Detector,Equipment Manufactring Technology[J],2012,2:220-223
[2]雷欣,在高指標要求下的紅外導引頭系統設計方法,《出版刊名稱》2013年××月××日
[3]秦勤.雷達目標跟蹤的卡爾曼濾波方法的研究[D].大連:大連海事大學,2006:20-50
[4]趙文鋒.控制系統設計與仿真[M].西安:西安電子科技大學出版社,2002
[5]肖仁鑫,張聘義,胡海雙,柳繼勇,周立鋼滾俯仰式紅外導引頭穩定平臺控制與仿真[J],紅外與激光工程.2007.9:363-365 XIAO Ren-xin,ZHANG Pinyi,HU Haisuang,LIU jiyong,Control and simulation of roll-pitch infrared seeker stabilization platform[J],INFRARED AND LASER ENGINEERING [J].2007.9:363-365
[6]曹原,雷達導引頭對低空慢速小目標探測能力的研究[J],現代雷達,2012,10,34(10):18-21 CAO Yuan,The Research on Laser Seeker for Circuit of Fourquadrant Photo Detector[J],Modern Radar,2012,10,34(10):18-21
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
