雙目視覺在移動機器人定位中的應用
2013-07-25 03:37:10王殿君
中國機械工程 2013年9期
王殿君
北京石油化工學院,北京,102617
0 引言
在計算機視覺領域根據攝像機的數目不同,可以分為單目視覺、雙目視覺和多目視覺。單目視覺無法直接得到目標的三維信息,只能通過移動獲得環境中特征點的深度信息,適用于工作任務比較簡單且深度信息要求不高的情況[1-2]。如果利用目標物體的幾何形狀模型,在目標上取3個以上的特征點也能夠獲取目標的位置等信息,但定位精度不高[3]。多目視覺可觀察到目標的不同部位,可以得到更為豐富的信息,但視覺控制器的設計比較復雜,且相對于雙目視覺更加難以保證系統的穩定性[4]。
本文簡要介紹了雙目視覺定位原理,利用所構建的室內移動機器人定位平臺,進行了機器人測距實驗和定位實驗。
1 雙目視覺定位原理
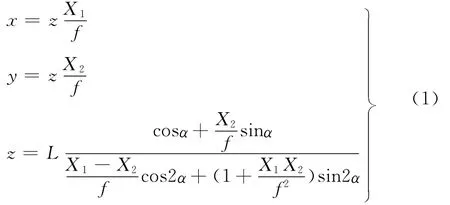
雙目立體視覺三維測量是基于視差原理的,即左相機像面上的任意一點只要能在右相機像面上找到對應的匹配點,就可以確定出該點的三維信息,從而獲取其對應點的三維坐標[5],工作原理如圖1所示。
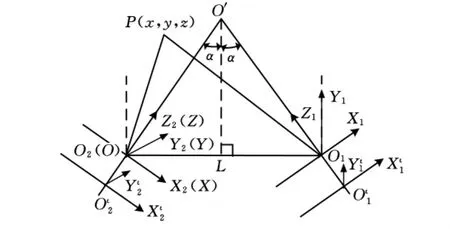
圖1 雙目視覺定位原理圖

2 構建實驗平臺
實驗平臺主要包括移動機器人和Micron-Tracker視覺系統兩部分。移動機器人平臺主要包括底層的嵌入式控制系統、上層Windows操作系統和機器人運動驅動系統,主要負責根據視覺系統提供的環境信息(目標位置或障礙物距離等)對機器人的運動進行決策,并控制和驅動機器人運動;視覺系統主要包括雙目立體視覺系統、圖像采集卡等,主要負責圖像的實時采集、處理、目標的匹配和識別,并輸出必要的環境信息。
2.1 移動機器人平臺
移動機器人包括兩層結構:底層的嵌入式控制系統平臺和上層的Windows操作系統平臺,如圖2所示。
(1)移動機器人底層控制器選用Intel公司的PXA270 ARM微處理器,XScale架構,主頻為520MHz,可以滿足系統對計算能力和處理速度方面的要求,并且該處理器內部資源豐富,有利于擴展各種常用接口。主處理器外接64M SDRAM、16M NOR Flash和SD卡等存儲設備,其上運行Linux操作系統,負責簡單處理移動機器人的內外傳感器信息,然后通過RS-232端口發送給上層Windows服務器程序,同時處理服務端程序發來的控制指令和其他操作請求,具體執行機器人各種硬件設施的操作。
(2)移動機器人上層控制器為 HP520計算機。基于Windows的服務器程序可以直接利用獲得的信息控制機器人,特別是實時性要求較高的任務,如避障等。上層控制器與底層控制器之間采用串口通信,該結構可以完成一些復雜的任務,如計算量大且算法復雜度較高的圖像處理、模式識別、目標跟蹤、復雜的路徑規劃和導航等任務[7-8]。

圖2 移動機器人
2.2 雙目視覺MicronTracker系統實驗平臺
Micron Tracker系統是一個光學姿態跟蹤產品家族的總稱。這個家族的產品使用相同的軟件接口——MTC函數庫,唯一不同的是每個家族成員使用不同的攝像機系統。第三代追蹤器采用全被動式設計,利用可見光立體地探測物體。被測物外部被涂上了一層可見花紋,傳感器通過一條標準的數字連接線與電腦相連,通過上位機控制器上的軟件來處理圖像并檢測圖像中的可見目標點。Micron Tracker系統如圖3所示。

圖3 MicronTracker系統
Micron Tracker雙目視覺系統的坐標系統有以下三種:
(1)面坐標。每一個面都有自己的坐標系統,其原點位于較長向量的中心。X軸從原點指向較長向量方向;Z軸垂直于兩個向量方向,指向該面法線相反的方向。當該面面向攝像機時,面的Z軸正好平行于攝像機的Z軸,Y軸根據右手坐標系規則定義。
(2)標記坐標系。標記坐標系的定義和標記模板中第一面定義的坐標系相同,即使該面不可見也是如此。
(3)攝像機坐標。原點位于攝像機中心,Z軸指向攝像機前方,X軸指向右邊,Y軸指向下方。當觀看攝像機圖像的時候,攝像機坐標系和屏幕坐標系平行[9]。
3 機器人定位實驗
3.1 測距精度實驗
首先固定雙目視覺儀器的位置,在儀器正前方沿直線移動標簽位置,每次X方向移動距離為50mm,在同一個地方取10次測量結果,然后求其平均值作為測量結果,最后將測量結果與標簽的實際位置相比較。通過實驗可得,Micron-Tracker的可測距范圍為30~180cm,理論距離與實測距離之間的數據如表1所示,關系曲線如圖4所示。由表1可知,測距最大偏差為8.644mm,最小定位偏差為0.056mm,平均定位偏差為1.773mm。這表明雙目視覺定位精度較高而且系統穩定性好,受環境因素影響較小,滿足移動機器人定位的需要。
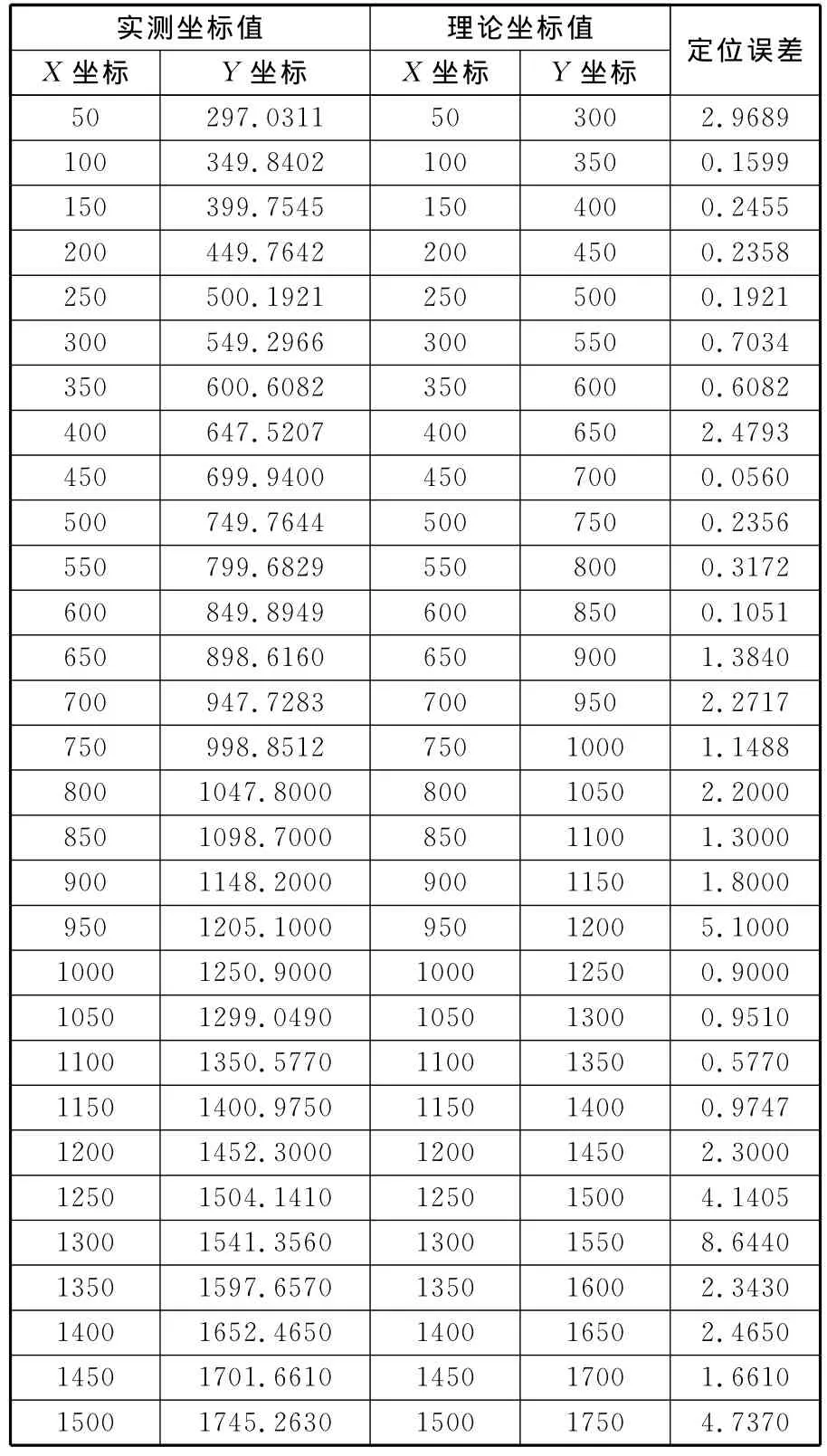
表1 測距精度實驗數據 mm
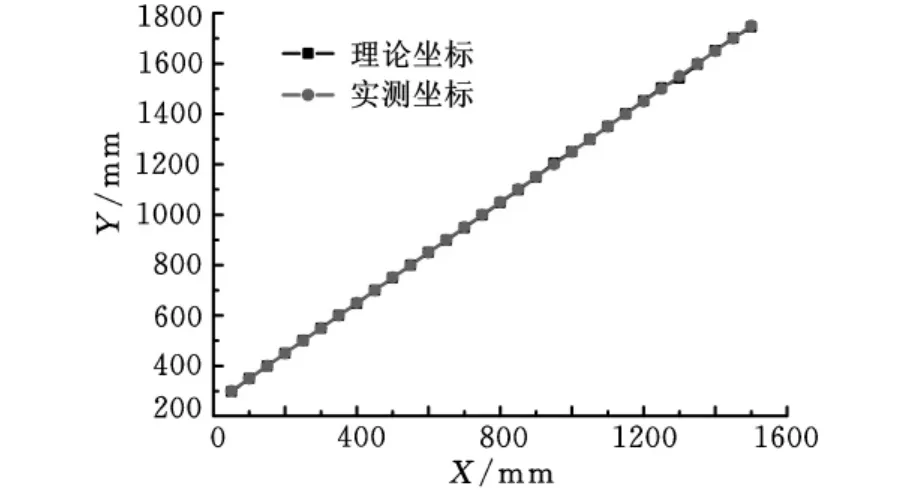
圖4 測距精度實驗
3.2 雙目視覺定位實驗
在室內結構化環境下,采用三邊定位算法進行移動機器人雙目視覺定位實驗。三邊定位算法是基于信號傳播模型的定位方法,根據測得的標簽相對于雙目視覺系統的坐標來計算標簽和雙目視覺系統之間的距離。
如圖5所示,點1、2、3、4為設定的標簽坐標點,中間點T為雙目視覺系統坐標點。假設標簽1、2、3的坐標分別為(x1,y1)、(x2,y2)、(x3,y3),3個標簽到移動機器人T的距離分別為d1、d2、d3,三邊公式為
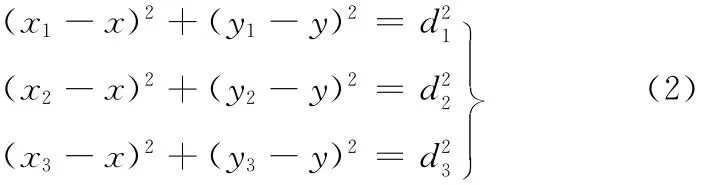
通過三邊定位算法可求得移動機器人T的當前坐標(x,y)為
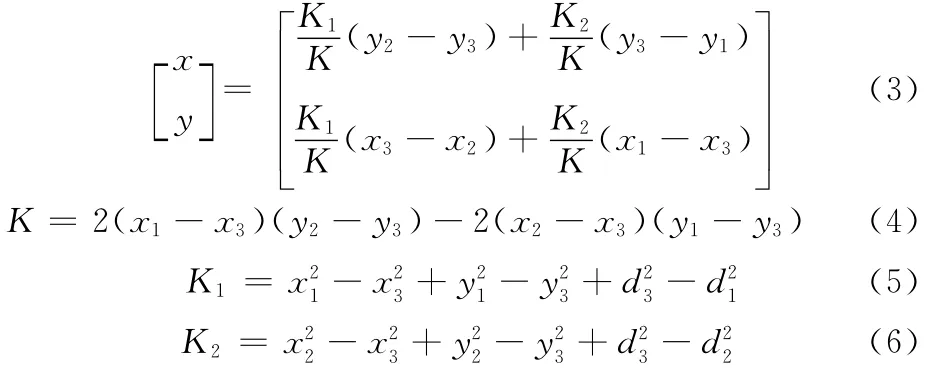
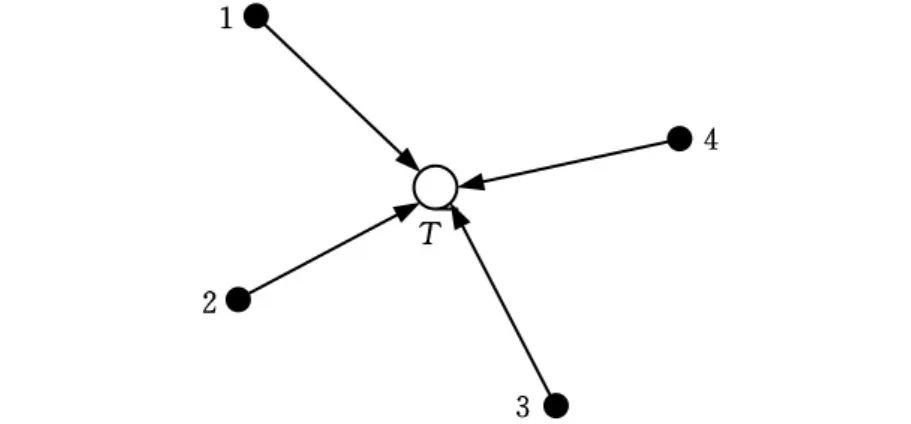
圖5 雙目視覺定位方法
根據實驗所得到的理論坐標與實測坐標數據如表2所示。

表2 理論坐標與實測坐標值比較 cm
3.3 實驗結果分析
圖6為實測坐標與理論坐標比較曲線圖,由表2可知移動機器人運動軌跡理論坐標值與實測坐標值最大偏差為3.635cm,最小偏差為0.424cm,平均偏差為1.553cm。
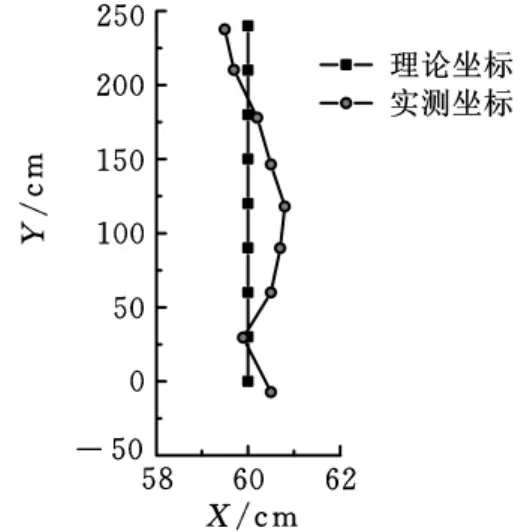
圖6 實測坐標與理論坐標比較
4 結論
(1)利用雙目視覺系統進行了測距精度實驗,并基于雙目視覺移動機器人進行了定位實驗。
(2)定位實驗結果表明,采用雙目視覺的移動機器定位系統工作穩定且定位精度較高。
(3)本文構建的基于雙目視覺移動機器人定位系統為移動機器人全自主導航提供了依據。
[1]張馳,靳伍銀,劉昊,等.基于雙目視覺系統的三維目標識別研究[J].機床與液壓,2010,38(1):22-24.
Zhang Chi,Jin Wuyin,Liu Hao,et al.Identification Technique for 3D Target Based on Binocular Visual System[J].Machine with Hydraulic,2010,38(1):22-24.
[2]唐新星,趙丁選.基于圖像疊合的工程機器人立體視覺系統[J].武漢理工大學學報,2009,33(2):156-159.
Tang Xinxing,Zhao Dingxuan.Research on Stereo Vision System of Construction Robot Based on Image Superposition[J]. Wuhan University of Technology,2009,33(2):156-159.
[3]崔開涌,王任杰,林小玲.機器人雙目視覺系統的算法研究與實現[J].計算機工程,2008,34(3):237-240.
Cui Kaiyong,Wang Renjie,Lin Xiaoling.Research and Realization on Binocular Stereo Vision System of Robot[J].Computer Engineering,2008,34(3):237-240.
[4]龔志平,王勇,尹治.基于網絡的嵌入式機器人視覺系統研究[J].微計算機信息,2009,25(11):262-264.
Gong Zhiping,Wang Yong,Yin Zhi.The Embedded Robot Vision System Based on Network Video Technology[J].Microcomputer Information,2009,25(11):262-264.
[5]鄭志強,季秀才,劉斐.COMS的雙目視覺系統的設計[J].國防科技大學學報,2003,25(6):1-4.
Zheng Zhiqiang,Ji Xiucai,Liu Pei.CMOS Binocular Vision System Design[J].Journal of National University of Defense Technology,2003,25(6):1-4.
[6]郝穎明,朱楓,歐錦軍.目標位姿測量中的三維視覺方法[J].中國圖像圖形學報,2002,7(12):1247-1251.
Hao Yingming,Zhu Feng,Ou Jinjun.3D Visual Methods for Object Pose Measurement[J].Image and Graphics,2002,7(12):1247-1251.
[7]Seet B,Liu G,Lee B,et al.A-STAR:A Mobile Adhoc Routing Strategy for Metropolis Vehicular Communications[C]//Lecture Notes in Computer Science.Springer Berlin/Heidelberg,2004:989-999.
[8]Bell M G H.Hyperstar:A Multi-path Astar Algorithm for Risk Averse Vehicle Navigation[J].Transportation Research.Part B,Methodological,2009,43(1):97-107.
[9]Leach A R,Lemon A P.Exploring the Conformational Space of Protein Side Chains Using Dead-End Elimination and the Algorithm[J].Proteins Structure Function and Genetics,1998,33(2):227-239.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
制造技術與機床(2017年3期)2017-06-23 08:11:21
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55