一種基于數(shù)字圖像處理的精確車牌識別系統(tǒng)
2013-07-09 03:08:40周慧娟
關(guān)鍵詞:系統(tǒng)
向 榮 周慧娟
(浙江大學(xué)數(shù)字技術(shù)及儀器研究所 杭州 310027)
0 引 言
機動車牌照作為機動車車輛的惟一標(biāo)識,在車輛標(biāo)識、車輛管理中發(fā)揮著關(guān)鍵作用.因而車牌識別系統(tǒng)(license plate recognition,LPR)作為智能交通系統(tǒng)的核心組成部分在停車場管理系統(tǒng)、高速公路超速自動化管理系統(tǒng)、公路布控、電子警察和小區(qū)車輛門禁系統(tǒng)等領(lǐng)域有著極其廣泛的應(yīng)用前景[1].從車牌識別系統(tǒng)進(jìn)入中國以來,國內(nèi)有大量的學(xué)者在從事這方面的研究,提出了很多新穎快速的算法.但就目前實際商用以及實驗室的識別率來看,目前中國車牌識別系統(tǒng)的準(zhǔn)確性還有待提高.因此,本文基于大量的實際車牌圖像的測試,提出了一種高識別率的車牌識別系統(tǒng).該系統(tǒng)中在定位以及傾斜校正中提出了若干新算法,最后的實驗結(jié)果表明,這些算法效果顯著,整個系統(tǒng)對隨機背景下車牌的正確識別率達(dá)到了90%以上.
1 系統(tǒng)設(shè)計與實現(xiàn)
車牌識別技術(shù)主要利用每一輛汽車牌照的惟一性和互異性2個特點,將采集到的車輛圖像經(jīng)過一系列的處理,識別出車牌號碼.按照模塊設(shè)計原則,該識別系統(tǒng)分為車牌定位、傾斜校正、字符分割以及字符識別4個模塊.各個模塊之間功能相對獨立,依次串聯(lián)成整個識別系統(tǒng),整體框圖見圖1.
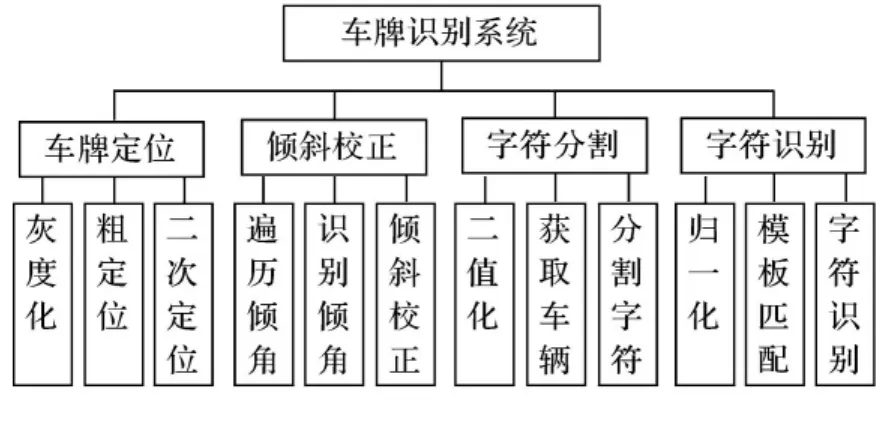
圖1 車牌識別系統(tǒng)總體框圖
1.1 車牌定位
車牌定位之前,要首先將彩色圖像灰度化,考慮到我國車牌的背景顏色與字符顏色的對比特點,本系統(tǒng)采用了獨創(chuàng)的區(qū)分度更大的灰度化公式

本系統(tǒng)采用3級定位,逐步求精,現(xiàn)分述如下.
1)粗定位 在粗定位階段,依次進(jìn)行Gauss-Laplace邊緣檢測,閾值二值化,連通域濾波處理,最后利用車牌區(qū)域的邊緣信息進(jìn)行粗定位,粗定位算法過程如下:(1)搜索水平方向跳變數(shù)與每行字符點總數(shù);(2)跳變數(shù)差分,搜索車牌上下邊;(3)將取間隔大于車牌高度的相鄰兩邊為上下邊候選組;(4)將過于接近的上下邊組從候選車牌可能組中剔除;(5)掃描可能的車牌上下邊的車牌字符垂直投影并進(jìn)行鄰域3列均值濾波;(6)用一個寬度為60像素,高度為候選車牌上下邊距的抽樣框進(jìn)行垂直投影值掃描,得出左右邊界;(7)利用牌寬高比的先驗知識將候選組中車牌寬高比不符合一定范圍內(nèi)的比例關(guān)系的組進(jìn)行濾除.
2)二次定位 在二次定位階段,依次進(jìn)行水平頂帽變換,去噪處理,力圖將車牌的準(zhǔn)確位置確定出來.二次定位算法過程如下:(1)逐行掃描并統(tǒng)計處跳變數(shù);(2)對跳變數(shù)矩陣進(jìn)行鄰域平均,使用[-3,2,1]模板對每行跳變數(shù)進(jìn)行卷積操作,再用[1,2,-3]模板對每行跳變數(shù)進(jìn)行卷積操作,檢測出該車牌候選組的上下邊;(3)再從左往右掃描,將每列的水平跳變點數(shù)累加.然后再次從左向右掃描,將跳變數(shù)進(jìn)行左右鄰域均值處理,取出大于某個閾值的列為該車牌候選組的左邊界,同樣的方式得到右邊界[2].
3)最終定位 最終定位是在傾斜校正后完成,它的作用是獲取精確的車牌信息,力求將所有字符區(qū)域識別出來而不帶來任何其他的干擾.在傾斜校正后,對其進(jìn)行改進(jìn)的Otsu二值化處理.最終定位過程如下:(1)求出每行背景像素所占的百分比;(2)求出每行水平跳變數(shù)以及相鄰上下行間的跳變數(shù)的差;(3)按照17×1的模板進(jìn)行水平腐蝕,求出相鄰兩行的前景像素值的特征;(4)再次進(jìn)行水平頂帽變換,并求出上下兩行的跳變數(shù),采用[-3,2,1]與[1,2,-3]模板進(jìn)行鄰域跳變數(shù)卷積操作;(5)對(1),(2),(3),(4)步中求得的特征值進(jìn)行融合,從而求出車牌的精確上下邊界;(6)掃描以車牌既定高度的1/3為寬,車牌高度為高的抽樣框內(nèi)的垂直投影,確定最終車牌左右邊界.最終定位完畢.結(jié)果參見圖2.

圖2 二次定位
1.2 傾斜校正
在車牌水平的情況下,車牌的水平投影具有2個明顯的波谷,這是由車牌字符與邊框中間的間隙形成.本文考慮采用水平投影方差為判斷依據(jù),求出傾斜角度并進(jìn)行校正.該算法的具體過程如下:(1)將車牌以1°為單位,以逆時針方向為正,依次傾斜-15°~15°;(2)求出每次傾斜后每行的投影點數(shù);(3)求出每行投影點數(shù)的均值和方差;(4)搜索方差最大時的傾斜角度;(5)調(diào)用C#的函數(shù)RotateTransform來對圖形對象進(jìn)行旋轉(zhuǎn)進(jìn)行傾斜校正,處理效果見圖3.
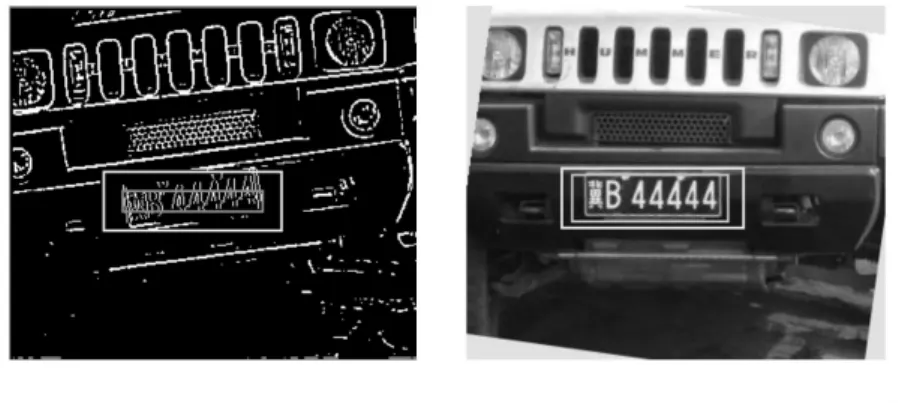
圖3 傾斜校正
1.3 字符分割
本文提出一種將車牌標(biāo)準(zhǔn)尺寸的先驗知識與車牌垂直投影特征的后驗知識相結(jié)合的分割思想.具體步驟如下:(1)根據(jù)車牌標(biāo)準(zhǔn)尺寸,計算每一個字符的列標(biāo)與車牌寬度的比例;(2)將比例系數(shù)乘以定位車牌子圖像的寬,求出車牌中的字符邊界大致位置,以該位置在某一鄰域內(nèi)進(jìn)行搜索.根據(jù)車牌字符的垂直投影,判斷精確的車牌字符邊界,同時還要驗證車牌中是否存在“1”;(3)依據(jù)所求車牌字符邊界,將車牌字符分割成為7個字符子圖像;(4)將子圖像歸一化為35×70的尺寸[3-5].
1.4 字符識別
本文采用了多種統(tǒng)計模式識別綜合法,首先采用了模板匹配的方法,計算字符與模板中最為相似的即為識別結(jié)果.匹配過程的數(shù)學(xué)描述為

由于模板匹配對相似的字符之間的識別率很差,如“8”和“B”,“O”和“Q”,“5”和“S”,“Z”和“2”,等等.仔細(xì)比對這些相似的車牌字符可以發(fā)現(xiàn),雖然從形狀上很難區(qū)分這些相似字,但是英文字符的4個角通常與數(shù)字有著很大的不同.利用這一點,本系統(tǒng)使用4個角的小區(qū)域相似度來對模板匹配進(jìn)行修正.整個識別過程如下:(1)利用上述計算公式算出車牌字符與每一個模板的相似百分比;(2)同時計算車牌字符與每個模板的4個角的相似度,將加權(quán)后的角相似度加上相似百分比作為判定依據(jù),將最大的相似百分比作為識別結(jié)果.
2 結(jié)果與分析
測試樣本為隨機背景含車牌的圖片200張,其中圖片的分辨率從5萬~80萬像素不等,車牌傾斜角度各異,光線明暗程度有別,圖4為經(jīng)過定位和分割的部分車牌識別結(jié)果.

圖4 定位及分割結(jié)果
由圖4可見,本系統(tǒng)提出的3級定位策略有效降低了定位的虛警率,最終定位的大多數(shù)區(qū)域為精確的車牌區(qū)域.另外,粗定位以后的略微放大車牌定位區(qū)域,也在一定程度上降低了第一次定位中的偏差,而在后續(xù)定位中達(dá)到將車牌區(qū)域準(zhǔn)確的切分出來.在保留字符完整的同時,切分到字符的邊緣,這樣的定位結(jié)果為之后的分割提供了十分有利的處理目標(biāo),定位準(zhǔn)確率為93.5%.
從圖4還可以發(fā)現(xiàn),本系統(tǒng)的分割結(jié)果相較于其他系統(tǒng)無疑精確很多.特別要指出的是,對于“1”字符的分割一直是個易錯點,圖4充分證明了本系統(tǒng)的分割策略行之有效,分割效果良好.
圖5是從本系統(tǒng)的結(jié)果顯示區(qū)截取的圖像.前19幅均識別無誤,但最后一幅出現(xiàn)了識別錯誤.在這些錯誤中,大部分是相似字的識別錯誤,在最后一幅圖中,漢字二值化的結(jié)果不夠清晰,結(jié)果也發(fā)生了很大的偏差,這是由二值化閾值不當(dāng)造成.最終識別準(zhǔn)確率為91%.

圖5 識別結(jié)果
3 結(jié)束語
本文以Visual Studio為開發(fā)工具,C#為開發(fā)語言完成了一套完整的車牌識別系統(tǒng)的設(shè)計開發(fā),并對車牌識別中傳統(tǒng)算法中存在的不足進(jìn)行了分析,提出了一些新的識別方法.實驗證明,整個系統(tǒng)可識別的圖像分辨率從5萬~80萬像素不等,車牌傾斜角度各異,光線明暗程度有別,單幅圖像識別時間在0.7~2s以內(nèi).該算法滿足實際需要,具有一定可靠性與可用性.在接下來的研究工作中,本課題還可在以下幾個方面進(jìn)行深入的研究.考慮與圖像采集端進(jìn)行綜合設(shè)計,以便更好的發(fā)揮先驗知識的定位效果,最終有利于形成算法產(chǎn)品化,實用化.優(yōu)化現(xiàn)有的識別算法,使得系統(tǒng)的準(zhǔn)確率更高,魯棒性更好.在系統(tǒng)實時性方面,盡量簡化冗余步驟,使速度更快,更具實用化.
[1]白晶心.車牌識別系統(tǒng)的實現(xiàn)[D].北京:北京郵電大學(xué),2009.
[2]王 葉.車牌識別系統(tǒng)中字符切分和識別技術(shù)的研究[D].北京:北京郵電大學(xué),2009.
[3]ACONCI J A,CARVALHO E R,RAUBER T R.A complete system for vehicle plate localization,Segmentation and recognition in real life scene[J].IEEE Latin America Transactions,2009,7(5):110-119.
[4]何鐵軍,張 寧,黃 衛(wèi).車牌識別算法的研究與實現(xiàn)[J].公路交通科技,2006,23(8):147-149.
[5]劉 興,蔣天發(fā).智能車牌識別系統(tǒng)中消除圖像干擾的方法[J].武漢理工大學(xué)學(xué)報:交通科學(xué)與工程版,2005,29(5):805-806.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
