潛艇耐壓殼體徑向初撓度評定方法研究
2013-07-09 03:08:26朱曉軍趙劍飛
關(guān)鍵詞:測量
王 鵬 朱曉軍 趙劍飛
(海軍工程大學(xué)船舶與海洋工程系1) 武漢 430033) (海裝駐431廠軍事代表室2) 葫蘆島 125005)
潛艇耐壓殼體的結(jié)構(gòu)通常設(shè)計成圓柱、圓錐、球面等斷面形狀規(guī)則的幾何體,在受到均布載荷的作用時,斷面不會產(chǎn)生變形;但是當其斷面存在偏離純圓的徑向初撓度時,將會由于彎矩作用產(chǎn)生附加彎曲應(yīng)力,從而使結(jié)構(gòu)受力狀態(tài)發(fā)生變化.大量結(jié)構(gòu)模型實驗表明:結(jié)構(gòu)的毀壞,大多是從發(fā)生徑向初撓度比較大的部位開始的[1].因此,在潛艇耐壓殼體的建造過程中,其徑向初撓度的控制是關(guān)系潛艇建造質(zhì)量的重要因素,徑向初撓度的準確測量和分析則是保證潛艇建造質(zhì)量的關(guān)鍵一環(huán).本文所研究的方法,首先利用全站儀進行轉(zhuǎn)站測量[2]獲取耐壓殼體某肋骨位置上32個母線劃分點的三維空間位置數(shù)據(jù),然后經(jīng)過坐標轉(zhuǎn)換[3]、平面參數(shù)估計等步驟,最后利用最小二乘圓法[4](least squire circle method,LSC)進行該肋骨平面上殼圈形狀的擬合和徑向初撓度的計算.模型測量試驗結(jié)果表明,該方法與現(xiàn)有撐尺法相比,有效提高了測量精度和測量效率、降低了人為誤差,保證了潛艇耐壓殼體的建造質(zhì)量.
1 母線劃分點測量
1.1 母線劃分點分類
在對潛艇耐壓殼體徑向初撓度進行測量時,所有的母線劃分點分布在同一個肋骨平面上,并將耐壓肋骨沿圓周方向分為n等分.由于潛艇耐壓殼體在不同的建造階段,內(nèi)部結(jié)構(gòu)的安裝情況不同,而這些內(nèi)部結(jié)構(gòu)形成了測量過程的遮擋物,因此需要依據(jù)不同的遮擋情況對所有母線劃分點進行分類,以便采用不同的測量方法進行測量,獲取全部測點信息的目的.依據(jù)艇體建造的不同階段母線劃分點可以分為兩類:(1)分段建造階段.在艇體分段建造階段,其內(nèi)部結(jié)構(gòu)尚未安裝,無任何遮擋物,潛艇耐壓殼體上的所有母線劃分點均外露,無需移動全站儀便可以完成所有測點的測量;(2)船臺總裝階段.在船臺總裝階段,艇體內(nèi)部的艙壁、平臺等內(nèi)部結(jié)構(gòu)已經(jīng)安裝到位,在測量時會有一些遮擋物導(dǎo)致在單一位置無法測得全部母線劃分點,此時可以通過移動全站儀測量得到全部測點的位置信息.
1.2 轉(zhuǎn)戰(zhàn)測量方法
在潛艇的建造過程中,分段建造階段和船臺建造階段都需要對耐壓殼體徑向初撓度進行測量,由于這2個建造階段過程中潛艇內(nèi)部結(jié)構(gòu)布置的不同,對徑向初撓度測量的要求也就不同,分段建造階段無需移動全站儀就可以完成所有測點的測量,直接得到空間坐標;在船臺總裝階段中,外界環(huán)境的影響,造成了不通視或者后視距離太短,不能在同一個測站測得所有的母線劃分點,必須要進行轉(zhuǎn)站測量,如圖1所示,移動全站儀,在不同測站上進行測量,得到不同坐標系下的測點坐標值,若在不同測站上測量某些公共點,就可以利用這些公共點進行坐標轉(zhuǎn)換[5-6],得到同一坐標系下的等分點坐標信息.
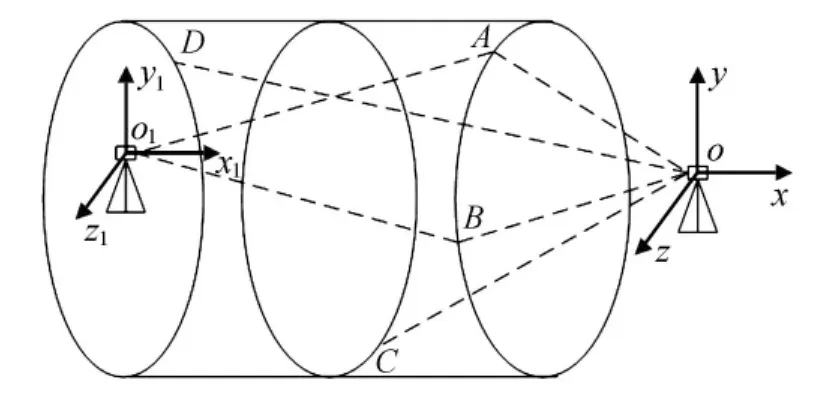
圖1 轉(zhuǎn)站測量方法圖解
如圖1所示,在O點和O1點對A,B2點進行測量得到2個坐標系下的不同坐標,分別為A點:(xA1,yA1,zA1)、(xA2,yA2,zA2),B點:(xB1,xB1,xB1)、(xB2,yB2,zB2),其中φij(i=1,2,…,n,j=1,2),i為測點編號,j為坐標系編號,利用同一點在不同坐標系下的坐標值,計算得到2個坐標系O1-x1y1z1與O2-x2y2z2之間的轉(zhuǎn)換關(guān)系.
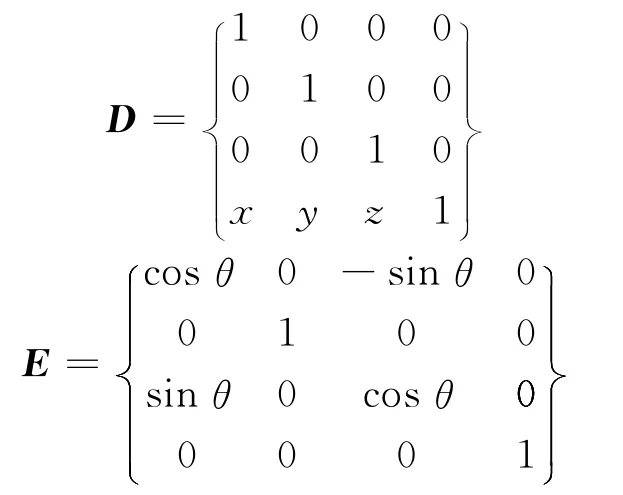
假設(shè)坐標系只經(jīng)過平移和繞y軸旋轉(zhuǎn),因此假設(shè)坐標系O1-x1y1z1經(jīng)過平移(x,y,z),并繞y軸旋轉(zhuǎn)角度θ(以右手坐標系旋轉(zhuǎn)為正)到達坐標系O2-x2y2z2,那么可設(shè)平移矩陣D和旋轉(zhuǎn)矩陣E分別為
根據(jù)坐標平移和旋轉(zhuǎn)公式,對于在兩個坐標系下的公共點都可以得到如下關(guān)系:

將公共點的坐標值代入到式(1)中,展開聯(lián)立方程組可以解得:

由(x,y,z,θ)的值可以得到平移矩陣D和旋轉(zhuǎn)矩陣E,利用式(1)可以將非公共點的坐標轉(zhuǎn)換為選定坐標系下的坐標.
2 初撓度評定
2.1 平面參數(shù)估計
經(jīng)過坐標轉(zhuǎn)換處理獲得所有測點同一坐標系下的空間坐標后,需要利用這些點擬合得到平面.該問題是利用空間點擬合平面,考慮到最小二乘法擬合平面時不能兼顧x,y,z3個方向均存在誤差的情況,故選用特征值法[7].特征值法是在滿足條件a2+b2+c2=1的條件下,根據(jù)平面方程ax+by+cz=d得到最優(yōu)平面參數(shù)估計.
假設(shè)對潛艇耐壓殼體分段進行測量,得到了n個數(shù)據(jù)點,則任意測點 至該擬合平面的距離為di=|axi+byi+czi-d|.模型簡化為在滿足條件情況下使得取到最小值.
2.2 平面圓擬合與初撓度計算
本文研究的潛艇耐壓殼體徑向初撓度評定方法選擇了具有統(tǒng)計意義的最小二乘圓法,算法雖然不能完全消除由于最大誤差所帶來的干擾因素,但在潛艇耐壓殼體這類鋼制結(jié)構(gòu)上,在實際的測點數(shù)量有限的情況下,最小二乘圓法與最小區(qū)域法、最小外接圓法和最大內(nèi)接圓法相比,是一種安全性比較高的算法[8].
所謂的最小二乘圓是潛艇耐壓殼體實際輪廓上的各測點到該圓距離的平方和最小的一個理論輪廓圓.以被測耐壓殼體實際輪廓的最小二乘圓作為測量基準圓,該測量基準圓到實際構(gòu)件輪廓的最大距離與最小距離之差,就是利用最小二乘圓法計算得出的徑向初撓度,如圖2所示.
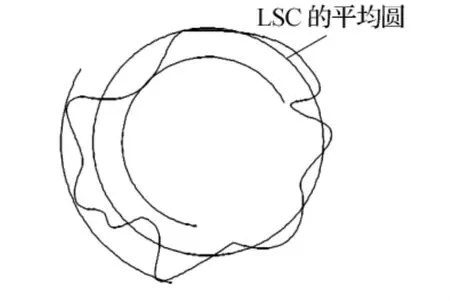
圖2 最小二乘圓圓度誤差
在擬合平面上,設(shè)參考圓的圓心為(x0,y0,z0),任意一個投影點的坐標為(xi,yi,zi),要獲得參考圓圓心,必須使得距離的平方和取到最小值,即:

取最小值,從而得到:

設(shè)半徑為R0,要求得R0必須使得

取最小值,得到:

那么任意測點的徑向初撓度為ω=R測-R0,其中
3 實例分析
3.1 實驗方案說明
1)實驗對象 工廠中加工的圓柱形標準件,為了便于進行轉(zhuǎn)站測量,標準件底部未封閉.
2)測量方法 針對圓柱形標準件上分布的32個測點,如圖3所示,為了提高測量的精度,考慮到激光測量設(shè)備打出的激光點是橢圓形的,布置的測點也采用了橢圓形的設(shè)計,并且在測量過程對激光進行了慮光處理,減少了激光的散射.實驗中后,再進行徑向初撓度的計算與評定,并將計算結(jié)果與實測結(jié)果進行對比分析.
3)實驗設(shè)備 南方科利達585R,采用無棱鏡、無反射片的方式進行測量.585R在無棱鏡條件下的測量精度為5+2×10-6.
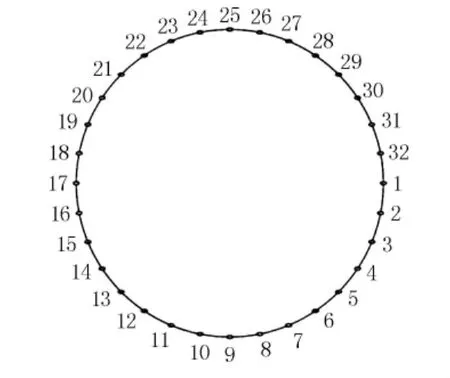
圖3 測點布置圖
3.2 實驗數(shù)據(jù)的記錄
根據(jù)實驗設(shè)計的要求,轉(zhuǎn)站2次,選取了10~15號測點為公共點,對某一肋位的等分點進行測量,分別記錄標準件32個測點以及公共點的測量數(shù)據(jù),如表1所列,主要包括測點水平角、平距、高差的信息.注:全站儀測量的角度單位是哥恩,它與度的換算關(guān)系為400gon=360°.
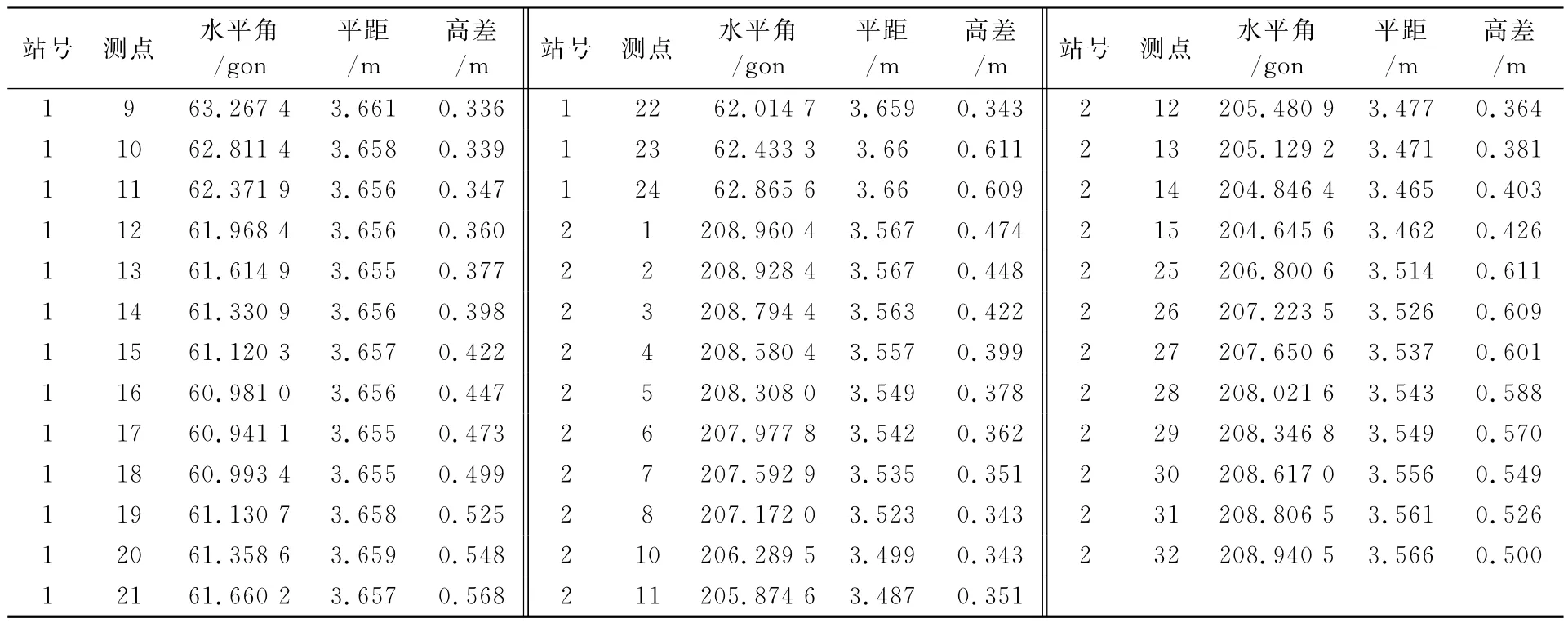
表1 測量原始數(shù)據(jù)
3.3 數(shù)據(jù)擬合結(jié)果分析
得到實驗的測量數(shù)據(jù)之后,導(dǎo)入到編寫的程序中進行數(shù)據(jù)計算,并將結(jié)果輸出到設(shè)定好的數(shù)據(jù)庫后,得到擬合的空間點坐標如表2所列.
利用本文提出的方法對標準件徑向初撓度進行計算,并與傳統(tǒng)的撐尺法測量結(jié)果進行比較,如表3所列.通過兩種方法結(jié)果的對比可以看出,本文提出的基于轉(zhuǎn)站測量和最小二乘圓法擬合的徑向初撓度評定方法的測量精度高于現(xiàn)有撐尺法的測量精度,通過該方法擬合得到的半徑與標準件理論半徑0.135m之間的誤差僅為0.089%,符合工程要求,初撓度變化范圍(-0.000 000 562 53~0.001 436 5)也在結(jié)構(gòu)強度要求的范圍內(nèi).
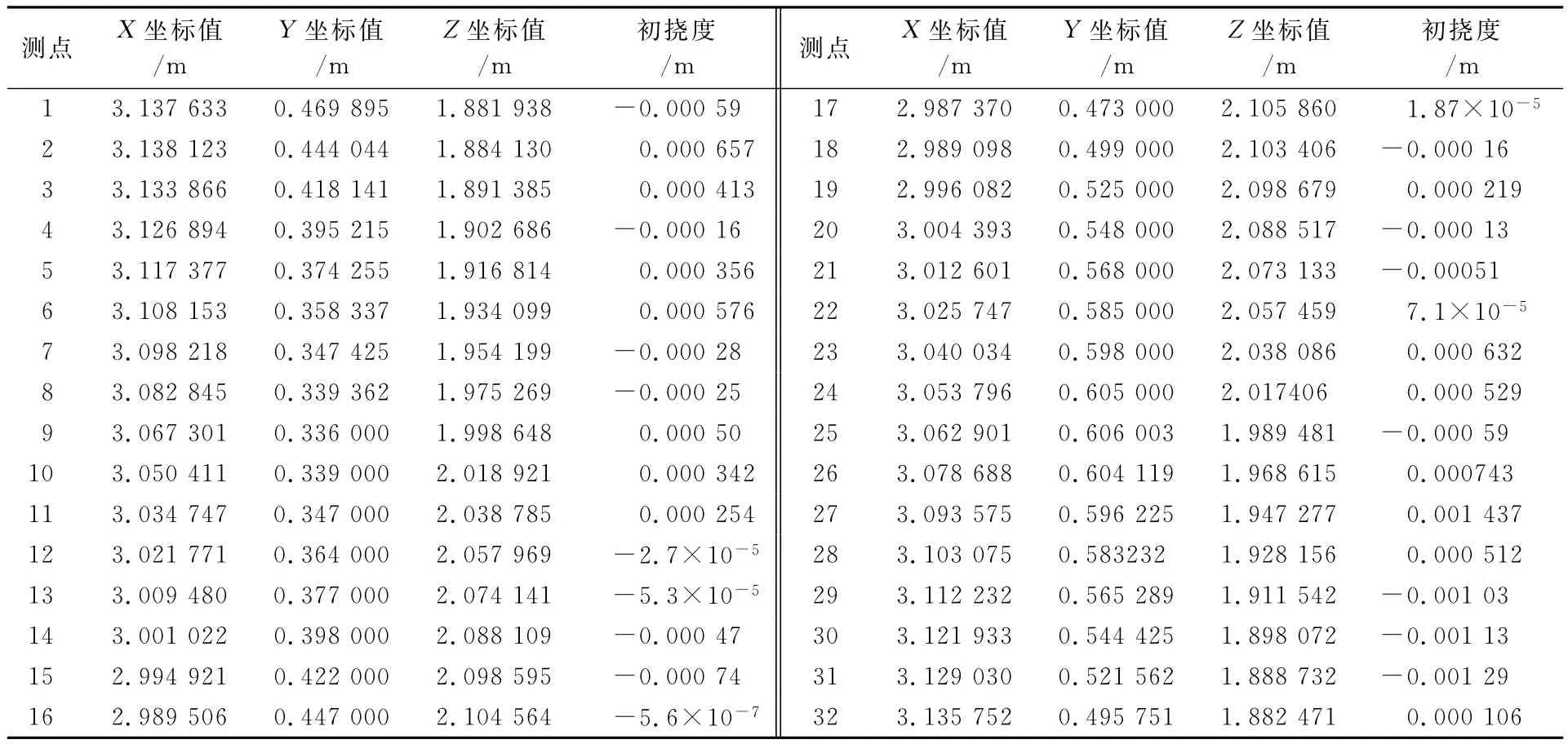
表2 測量數(shù)據(jù)計算結(jié)果

表3 本文方法與撐尺法結(jié)果比較
4 結(jié)束語
實驗驗證表明,本文提出的潛艇耐壓殼體徑向初撓度評定方法改善了現(xiàn)有撐桿法測量精度不高的缺陷,其在各個母線劃分點的初撓度的評定精度都非常高,為了更好的將該方 法應(yīng)用于潛艇耐壓殼體徑向初撓度測量和評定的工程實踐中,今后的工作還要完善以下方面的工作:(1)建立系統(tǒng)的徑向初撓度評定算法誤差模型,方便誤差研究及控制;(2)完善誤差的評價體系,完成徑向初撓度誤差評價功能的自動化實現(xiàn).
[1]曹 雷.艦艇建造工藝[M].北京:海潮出版社,2003.
[2]潘國榮,張 鵬,孔 寧.造船精度控制系統(tǒng)中用移站測量獲取點位信息的一種方法[J].大地測量與地球動力學(xué),2010,30(5):121-124.
[3]孫家廣.計算機圖形學(xué)[M].北京:清華大學(xué)出版社,1998.
[4]張玉梅.基于多尺度分析的圓度誤差在線檢測研究[D].長春:吉林大學(xué),2003.
[5]楊 凡,李廣云,王 力.三維坐標轉(zhuǎn)換方法研究[J].測繪通報,2010(6):5-7,15.
[6]陸濟湘,李德華,盧 凌.基于遺傳算法的多關(guān)節(jié)掃描儀參數(shù)標定[J].武漢理工大學(xué)學(xué)報:交通科學(xué)與工程版,2005,29(4):506-509.
[7]官云蘭,程效軍,施貴剛,一種穩(wěn)健的點云數(shù)據(jù)平面擬合方法[J].同濟大學(xué)報,2008(7):981-984.
[8]GASS S,WITZGALL C.On an approximate minimax circle closest to a set of points[J].Computers& Operations Research,2004,31:637-643.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
