基于SVM 單閘板防噴器殼體聲發(fā)射源定位方法研究
2013-07-08 01:17:26趙俊茹徐慶龍苗婷婷張佩剡
石油礦場(chǎng)機(jī)械 2013年4期
趙俊茹,徐慶龍,苗婷婷,張佩剡
(1.東北石油大學(xué)機(jī)械科學(xué)與工程學(xué)院,黑龍江大慶 163318;2.大慶油田有限責(zé)任公司勘探開(kāi)發(fā)研究院,黑龍江大慶 163712;3.甘肅藍(lán)科石化高新裝備股份有限公司,蘭州 730070)①
防噴器是井控系統(tǒng)的重要部件,對(duì)鉆井安全,特別是高壓井控系統(tǒng)的工作性能具有重要作用。采用超聲波和射線方法對(duì)其定期檢驗(yàn)很難發(fā)現(xiàn)超標(biāo)缺陷,如果選擇全部返修,費(fèi)用較高[1]。利用聲發(fā)射檢測(cè)技術(shù)對(duì)其進(jìn)行檢測(cè)時(shí),存在于超標(biāo)缺陷中的活性缺陷可以快速被發(fā)現(xiàn)。如果只對(duì)檢測(cè)出來(lái)的活性缺陷進(jìn)行返修,能節(jié)省大筆費(fèi)用。
由于單閘板防噴器殼體的結(jié)構(gòu)存在多拐角,即形狀突變處較多,在上下表面還有多處螺栓孔,即結(jié)構(gòu)不連續(xù),在聲發(fā)射信號(hào)經(jīng)過(guò)界面時(shí)會(huì)發(fā)生折射、反射、疊加及模式轉(zhuǎn)換的現(xiàn)象,又由于其不同的衰減率及傳播模式,導(dǎo)致傳感器接收的聲發(fā)射信號(hào)與原始聲發(fā)射信號(hào)出現(xiàn)了較大的差別。因此,在利用聲發(fā)射技術(shù)對(duì)防噴器殼體進(jìn)行缺陷定位時(shí),傳統(tǒng)的時(shí)差-能量定位方法,或模態(tài)聲發(fā)射定位方法均會(huì)導(dǎo)致獲得的聲發(fā)射信號(hào)有所偏差,使定位精度下降。在傳統(tǒng)定位方法日漸顯現(xiàn)出其局限性時(shí),智能定位方法以其方便快捷且適應(yīng)性廣而得到發(fā)展,神經(jīng)網(wǎng)絡(luò)、支持向量機(jī)即為目前較為常用的智能定位方法。但是,神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)結(jié)構(gòu)難以確定,同時(shí)易陷入局部極值,需要較大的學(xué)習(xí)樣本。基于統(tǒng)計(jì)學(xué)方法研究運(yùn)用的支持向量機(jī)(SVM),是專門針對(duì)有限樣本,有著全局優(yōu)化,適應(yīng)性強(qiáng),推廣能力好等優(yōu)點(diǎn)[2],在目前的實(shí)際工程應(yīng)用中都有著較好的效果。
本文研究了聲發(fā)射定位中的支持向量機(jī)在單閘板防噴器殼體缺陷檢測(cè)中的應(yīng)用,通過(guò)其分類的功能判別出缺陷所在面,利用回歸的功能確定出缺陷所在的具體位置;采用試驗(yàn)方法驗(yàn)證其可行性與準(zhǔn)確性。
1 SVM的基本原理
SVM的主要思想是建立一個(gè)分類超平面作為決策曲面,并使得樣本集到分類超平面的距離最大,得到分類器的判別函數(shù)盡可能的實(shí)現(xiàn)正確分類[3]。
假設(shè)大小為l的訓(xùn)練樣本集{(xi,yi),i=1,2,…,l}由2個(gè)類別組成,若xi屬于第1類,則記yi=1;若xi屬于第2類,則記yi=-1。構(gòu)造最優(yōu)分類超平面,即一種可以無(wú)誤差的劃分訓(xùn)練數(shù)據(jù),并使得超平面或超平面最近的向量離每一類數(shù)據(jù)的距離均是最大的超平面,其方程可描述為[4]:

式中:w為權(quán)值向量;φ(x)為輸入空間到特征空間的變換幾何;b為偏置;x為輸入向量。
求解最優(yōu):
式中:C為懲罰參數(shù);ξi為松弛變量。
得到最終的判別函數(shù)為:

式中,sgn為符號(hào)函數(shù);a*,b*分別為支持向量xi對(duì)應(yīng)的拉格朗日乘子及偏置;K為核函數(shù)。
本文在位置識(shí)別器建立好之后,采用了一對(duì)一的多值分類算法[5]進(jìn)行缺陷區(qū)域的識(shí)別。支持向量回歸方法不同于分類方法是尋找一個(gè)使兩類樣本分開(kāi)的最優(yōu)分類面,它尋找的是一個(gè)使得所有訓(xùn)練樣本離其誤差最小的最優(yōu)分類面[6]。通常情況下,支持向量回歸方法是在定義了線性不敏感損失函數(shù)ε之后,引入松弛變量ξi,ξ*i ,并在滿足式(4)[7]。

式中:ε為損失函數(shù)參數(shù)。
最優(yōu)求解得回歸函數(shù)為

式中:αi為拉格朗日乘子。
式(3)和(5)是在高維特征空間中,計(jì)算很困難。引用核函數(shù)K(xi,xj)=φ(xi)T·φ(xj)則可避免高維特征空間“維數(shù)災(zāi)”的出現(xiàn),且沒(méi)有增加計(jì)算的復(fù)雜度。因此,在求解時(shí)只需引用適應(yīng)的核函數(shù)即可。本文選用的核函數(shù)為徑向基核函數(shù),其表達(dá)式為:

式中:γ為核參數(shù)。
2 防噴器殼體的缺陷定位過(guò)程
2.1 傳感器布置
針對(duì)單閘板防噴器殼體的特殊結(jié)構(gòu),采用8個(gè)聲發(fā)射傳感器,分別粘貼在殼體的上下表面的4個(gè)角上,如圖1所示。

圖1 傳感器位置序號(hào)分布
根據(jù)傳感器的布置,可以從8個(gè)傳感器選擇相近的4個(gè)組成6個(gè)定位面,利用SVM 首先將其劃分為6類,對(duì)6個(gè)類型進(jìn)行識(shí)別,每一類所代表的平面如表1所示,進(jìn)而利用SVM的回歸功能確定缺陷所在面的具體位置。

表1 輸出類型
2.2 輸入?yún)?shù)的選取
經(jīng)過(guò)對(duì)試驗(yàn)數(shù)據(jù)的分析與研究,獲得了上升時(shí)間、振鈴計(jì)數(shù)、持續(xù)時(shí)間、能量、幅值這5個(gè)定位精度最好的輸入?yún)?shù),由于每個(gè)面的定位有8個(gè)傳感器,因此在每次的定位中通過(guò)這8個(gè)傳感器可得到40個(gè)特征參數(shù),即輸入數(shù)據(jù)維數(shù)為40。利用MATLAB 中mapminmax 函數(shù),[y,ps]=mapminmax(x,ymin,ymax);歸一化處理各個(gè)參數(shù)。
2.3 參數(shù)選擇
懲罰參數(shù)C 和核參數(shù)γ是在采用核函數(shù)為徑向基核函數(shù)的SVM 進(jìn)行建模時(shí)直接影響模型的預(yù)測(cè)準(zhǔn)確程度的2個(gè)參數(shù),在建模時(shí)需要認(rèn)真考慮。目前,交叉驗(yàn)證法、基于粒子群算法的參數(shù)選擇以及網(wǎng)格搜索法是較為常用的參數(shù)選擇方法。
基于粒子群算法在幾種參數(shù)選擇方法中精確率較高,但經(jīng)研究發(fā)現(xiàn)PSO 算法會(huì)出現(xiàn)早熟收斂現(xiàn)象,導(dǎo)致參數(shù)選擇的精確率有所降低,為此,本文采用了一種基于適應(yīng)度定標(biāo)[8]及交叉因子的粒子群算法的參數(shù)選擇法,其主要實(shí)現(xiàn)過(guò)程為:首先計(jì)算每個(gè)粒子適應(yīng)值,采用指數(shù)定標(biāo)的方法(f′=e-kf,取k=0.5)對(duì)粒子進(jìn)行定標(biāo),并對(duì)定標(biāo)后的粒子的適應(yīng)值進(jìn)行重新計(jì)算,并對(duì)其排序,對(duì)于適應(yīng)度好的粒子,將其分為兩部分,一部分直接進(jìn)入下一代,另一部分放在一起進(jìn)行配對(duì)。選擇前一部分進(jìn)入下一代,后一部分兩兩配對(duì),并利用配對(duì)的過(guò)程中隨機(jī)產(chǎn)生一個(gè)交叉位置,進(jìn)行選擇和交叉操作,由此獲得子代的數(shù)目就與其與父代的數(shù)目相同,增加了粒子多樣性,同時(shí)也避免了局部最優(yōu),并使得收斂的速度變快,從而確定出定位精度較高的參數(shù)。
將歸一化的試驗(yàn)數(shù)據(jù)代入這種新的種群算法中進(jìn)行運(yùn)算,經(jīng)測(cè)試后設(shè)定粒子群算法中的社會(huì)學(xué)系數(shù)c1=1.5,認(rèn)知系數(shù)c2=1.7。設(shè)計(jì)最大進(jìn)化數(shù)量為100,最大種群數(shù)量為20,k=0.2。通過(guò)運(yùn)算后可得懲罰參數(shù)C=2.3481,核函數(shù)參數(shù)γ=2.6848,其分類準(zhǔn)確率為98.8764%。選擇結(jié)果如圖2所示。

圖2 參數(shù)選擇結(jié)果
對(duì)于支持向量機(jī)回歸的不敏感損失函數(shù)參數(shù)ε同樣應(yīng)用此種方法進(jìn)行選取,得到ε=0.01。
3 試驗(yàn)驗(yàn)證
試驗(yàn)選用殼體長(zhǎng)寬均為50cm,高為37cm的單閘板防噴器進(jìn)行試驗(yàn),其形狀如圖3所示。主要的試驗(yàn)裝置是美國(guó)PAC 公司生產(chǎn)的SAMOS-Ⅱ聲發(fā)射檢測(cè)儀,R15傳感器、2/4/6前置放大器組成。

圖3 單閘板防噴器
試驗(yàn)時(shí),將所測(cè)殼體的6個(gè)面展開(kāi)成二維平面圖并確定x,y 坐標(biāo)方向,即圖4所示,按照此坐標(biāo)方向及單閘板防噴器殼體結(jié)構(gòu)尺寸,重新標(biāo)定各面測(cè)試點(diǎn)的坐標(biāo)獲得各模擬測(cè)點(diǎn)的新坐標(biāo)值。

圖4 殼體展開(kāi)圖
用斷鉛信號(hào)模擬聲發(fā)射源,分別在殼體的6個(gè)面上斷鉛,每個(gè)面分別采集11組有效信號(hào)。對(duì)提取的樣本進(jìn)行歸一化處理,同時(shí)每個(gè)面選擇10組作為訓(xùn)練數(shù)據(jù),剩余一組作為測(cè)試數(shù)據(jù),設(shè)定好SVM的各參數(shù)值,進(jìn)行定位,得到如表2所示結(jié)果。
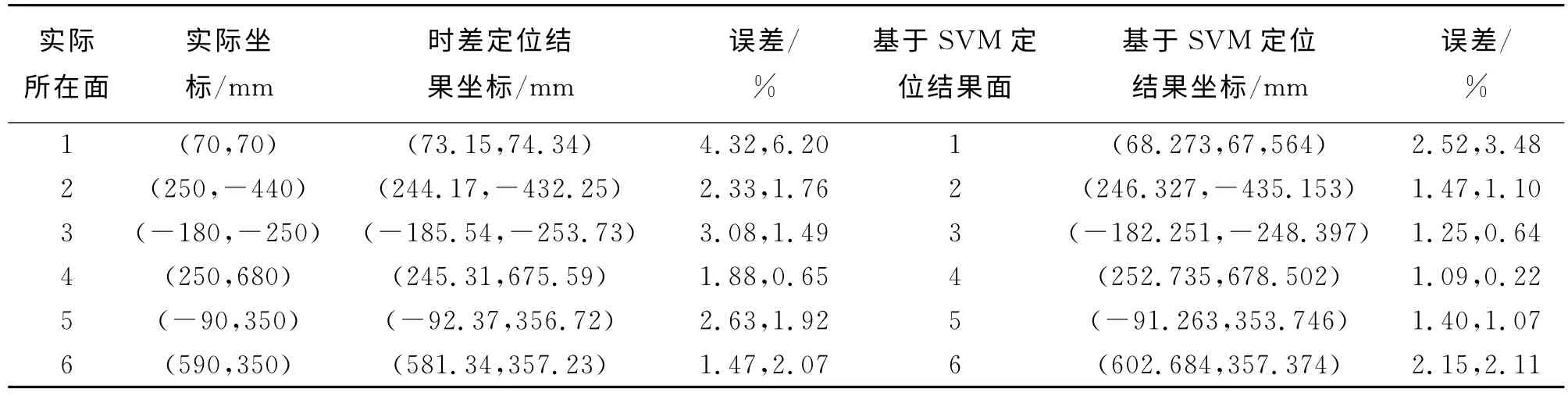
表2 定位數(shù)據(jù)
由表2可以看出,利用支持向量機(jī)對(duì)防噴器殼體進(jìn)行定位是可行的,且其定位精度較時(shí)差定位有所提高。由此可見(jiàn),對(duì)于這種結(jié)構(gòu)復(fù)雜,樣本量較小的情況,支持向量機(jī)是一種較為實(shí)用且精度較高的定位方法。
4 結(jié)論
1)防噴器殼體的結(jié)構(gòu)復(fù)雜,在進(jìn)行缺陷檢測(cè)時(shí)常規(guī)方法的定位精度低。
2)依據(jù)SVM 理論建立了單閘板防噴器殼體聲發(fā)射定位的分類、回歸的模型,并對(duì)其參數(shù)的選擇進(jìn)行了研究。
3)建立了單閘板防噴器殼體聲發(fā)射檢測(cè)的試驗(yàn)臺(tái),用斷鉛模擬缺陷源進(jìn)行定位試驗(yàn)。結(jié)果表明:支持向量機(jī)可以在單閘板防噴器殼體的缺陷定位中應(yīng)用,且準(zhǔn)確度較高。
[1]朱詳軍.單閘板防噴器的聲發(fā)射檢測(cè)初步實(shí)踐[J].鉆采工藝,2006,29(4):86-87.
[2]鄒慶龍,陳桂娟,付海龍,等.基于柔度矩陣和支持向量機(jī)的井架損傷識(shí)別技術(shù)[J].石油礦場(chǎng)機(jī)械,2008,37(2):2-3.
[3]孫學(xué)斌.AR 模型和SVM 在機(jī)床滾動(dòng)軸承故障診斷中的應(yīng)用[J].機(jī)械工程與自動(dòng)化,2010(2):132-133.
[4]毛漢穎,黃振峰,王向紅.裂紋源的支持向量機(jī)與神經(jīng)網(wǎng)絡(luò)定位對(duì)比研究[J].廣西大學(xué)學(xué)報(bào),2009,34(3):358-359.
[5]PLATT J C,CRISTIANINI N,SHAWE-TAYLOR J.Large margin DAGs for multiclass classification[C]//Advances in Neural Information Processing Systems 12.Massachusetts:MIT Press,2000(12):547-553.
[6]鐘波,劉兆科.基于偏最小二乘的支持向量機(jī)多分類方法[J].計(jì)算機(jī)工程與應(yīng)用,2007,43(17):174-175.
[7]VAPNIC V.Statistical Learning Theory[M].New,York:Wiley Press,1998.11:342-344.
[8]陳永剛,楊鳳杰,孫吉貴.新的粒子群優(yōu)化算法[J].吉林大學(xué)學(xué)報(bào):信息科學(xué)版,2006,24(2):182-183.
猜你喜歡
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
少兒科學(xué)周刊·少年版(2015年3期)2015-07-07 21:00:00
