硬件在環試驗臺整車狀態跟隨控制系統設計
2013-07-07 03:04:30王子涵余春賢韓佐悅孫博華
吉林大學學報(工學版) 2013年3期
關鍵詞:信號
李 靜,王子涵,余春賢,韓佐悅,孫博華
(吉林大學 汽車仿真與控制國家重點實驗室,長春130022)
汽車電控系統開發[1]的實質是在汽車行駛所產生的運動環境中完成電控系統的傳感器、執行器與電控單元等軟硬件的匹配調校,最終使電控系統能夠根據傳感器監測信息,將汽車實際運動狀態調節改變為預期運動狀態。目前大型汽車狀態模擬器成本較高,因此具有低成本優勢的硬件在環 (Hardware-in-the-loop,HIL)[2-3]作 為 一 種實時仿真試驗技術已成為研究熱點,并被廣泛應用于汽車電控單元(ECU)的研發[4-8]。
將HIL技術應用于整車運動模擬的研究有Dspace公司的Simulator實驗臺 但該實驗臺成本較高,為了開發具有相同功能且成本較低的HIL實驗臺,本文設計了HIL整車運動模擬裝置的跟隨控制系統的主環控制器和伺服環控制器,通過典型工況試驗,將本系統采集的實際信號與目標信號對比,證明了使用本文設計的控制器可以實現汽車運動狀態的硬件在環模擬。
1 整車運動狀態模擬HIL試驗臺
圖1為整車運動模擬裝置HIL試驗臺(簡稱HIL試驗臺)。其主要包括:①上位機,嵌有步進電機控制和信號處理[10-11]軟件;②下位機(研華PCL-818L工控機),提供16路A/D和16路數字I/O;③集電環,防止三維運動裝置上的信號導線因裝置運動而發生纏繞;④運動模擬裝置(3個獨立電機驅動),實現模擬并為汽車電控系統提供整車運動信號;⑤電機驅動器,接收下位機傳來的整車運動模擬控制指令,相應產生電機驅動信號;⑥集成有傳感器和執行器的電控單元(待測試)。
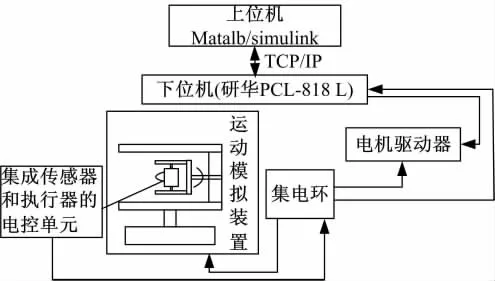
圖1 HIL試驗臺組成示意圖Fig.1 Components of HIL test bench
試驗臺工作原理如下:上位機內運行模擬裝置的控制程序,經 Matlab軟件的RTW(Real time workshop)轉化為C代碼并下載到下位機。由Xpc target[12](其運行界面見圖2)完成已定義下位機相應硬件端口輸出運動模擬裝置的控制信號,上、下位機基于TCP/IP協議且通過標準以太網實現通信。
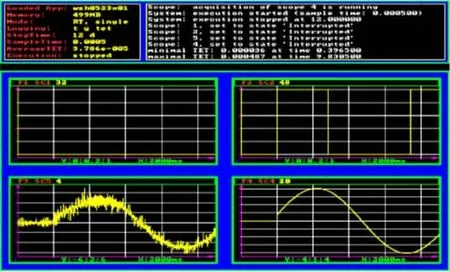
圖2 Xpc target的運行界面Fig.2 Running interface of Xpc target
2 HIL試驗臺整車狀態跟隨控制系統
2.1 HIL試驗臺運動模擬的轉換原理
汽車電控系統的控制目標為整車的運動狀態,包括質心縱向加速度ax、側向加速度ay及繞質心的橫擺角速度ωr。HIL試驗臺運動模擬的轉換原理如圖3所示。首先,定義試驗件動坐標系為O′X′Y′Z′,原點O′位于電控單元中心。規定運動模擬裝置初始狀態時,試驗件平板平面平行地面,即X′平行地面(X′亦平行于一級電機軸線),且規定遠離電機方向為其正方向,Z′過O′且垂直于試驗件平面,以指向上方為正,Y′與X′、Z′符合右手定則。其次,定義試驗臺坐標系OXYZ,原點O與原點O′重合,且二者在運動模擬裝置運動過程中相對慣性坐標系固定不動。規定運動模擬裝置初始狀態下,試驗臺動坐標系的3個坐標軸與試驗件動坐標系的3個坐標軸對應重合,且正方向一致,該坐標系不隨試驗件運動而改變。此外,定義一級電機繞自身軸線相對水平位置轉角為φ1;二級電機繞Y軸相對水平位置轉角為φ2;角速度為ω2;三級電機轉動角速度為ω3,其中ω2、ω3符合右手定則。
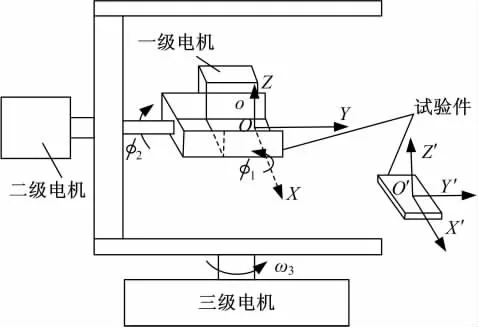
圖3 HIL試驗臺運動模擬的轉換原理示意圖Fig.3 Principle of motion simulation with HIL Test Bench
由圖4可得:試驗件平面(即O′X′Y′平面,圖中以ε平面表示)中心沿X′軸的加速度分量為ax;沿Y′軸的加速度分量為ay;繞Z′軸角速度為ωr。對圖4中試驗件的動力學分析可得:

圖4 空間矢量分解圖Fig.4 Decomposition map of space vector
式中:g為重力加速度。
2.2 HIL試驗臺整車狀態跟隨控制系統設計
HIL試驗臺整車狀態跟隨控制系統包括主環控制器和伺服環控制器。主環控制器輸入為控制目標與其實際值的偏差,輸出為電機的目標轉速和方向。伺服環控制器接受控制信號,實現HIL試驗臺電機角位移和角速度動作。
2.2.1 主環有限狀態機控制器
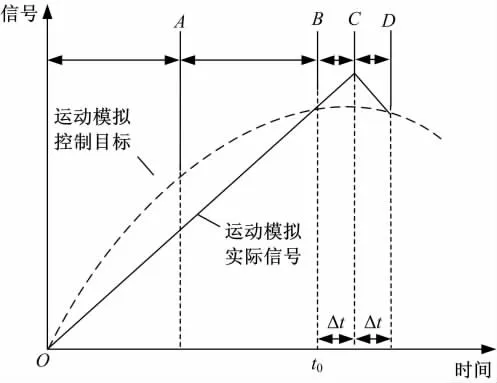
圖5 電機恒速控制換向示意圖Fig.5 Diagram of reversing with constant motor speed
為了較好地跟隨目標信號,需要較高的電機轉速,否則會出現圖5中OA段間所示狀態,即目標信號變化率較大,而電機實際轉速較低,跟隨效果差。當以固定的較高轉速進行跟隨時會導致換向過頻。系統每隔一段時間進行一次信號采樣,并根據采集的信息進行計算,從而實現控制。每次采樣間隔內控制信號不變,但目標信號是實時變化的,如圖5中B點所示,記為t0(為一采樣時刻),此時刻跟隨目標信號大于電機實際轉動信號,電機以一固定轉速轉動,即實際轉動信號斜率不變,而目標信號斜率較小,導致BC段間電機信號超過目標信號,從而在C采樣時刻進行換向。換向之后電機將以同樣的速度轉動,信號斜率大小不變,而目標信號斜率絕對值較小,將導致下一采樣時刻D時電機信號再次小于目標信號,再次換向,如此往復導致電機換向過頻。高速換向過頻一方面增加了電機負擔,導致電機響應較慢;另一方面造成換向速度過快,沖擊和振動較大。因此,僅通過方向控制電機跟隨不能滿足要求,本文選用電機方向控制和電機速度控制可以有效地減少換向。
結合圖6對電機轉速自適應調整機理進行說明。對于正反兩向,均設置低速、中速和高速三級轉速電機信號。圖6中時間點ti為電機變速時刻。控制過程中,當實際信號與目標信號相差較小時(見圖中0~t1、t4~t5、t5~t6階段),此時若轉速過高,為了實現信號跟隨,電機將不斷換向,實際信號以反復穿過目標信號的形式完成跟隨,換向次數多,控制效果較差。當實際信號與理想信號相差較大時(見圖中t1,t6時刻),若達到一定門限值時,為了使實際信號接近目標信號,進行中速跟隨。若實際信號與目標信號差值繼續增大,達到第3個門限值(見圖中t2時刻),則再次提高轉速,進行高速跟隨。
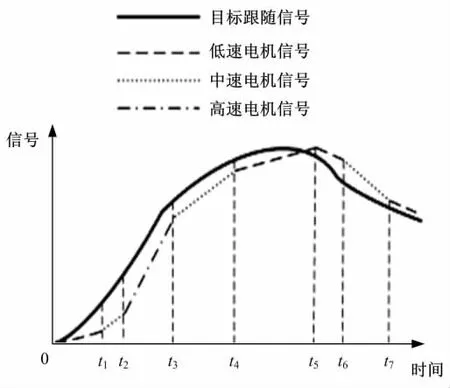
圖6 電機轉速自適應信號跟隨示意圖Fig.6 Signal following with self-adaptive motor speed
2.2.2 伺服環電機控制器
伺服環的一、二級電機為步進電機,三級電機為直流伺服電機。其中步進電機接收信號由目標角位移與實際角位移偏差計算得到,為PWM(Pulse width modulation)、方向及使能脈沖信號。直流伺服電機的轉速和方向控制信號,由驅動器內置的PID控制器根據輸入的目標角速度與實際角速度偏差計算得到。
2.2.3 主控制環有限狀態機
采用Matlab的Xpc和Stateflow模塊,編寫將開發運動模擬控制目標信號 (ax,ay,ωr)轉化為控制目標(φ2,φ1,ω2,ω3)的主環有限狀態機控制算法。考慮到主環控制器需要根據控制目標的變化率調節電機轉速,所以選定3種電機轉速作為狀態機的有限狀態(實際上應根據需要確定狀態數量)。
仿真模型在第i(i=1、2)級步進電機控制中設置兩個計數器,其值分別記為Di和Mi。分別為在電機細分一定時,從水平位置轉到目標加速度對應角度,所需步數和該電機實際脈沖矢量和(正向為累加;反向為減)。通過兩值差的絕對值與邏輯門限值Kimax和Kimin進行比較來選擇步進電機脈沖周期Periodi,進而實現步進電機轉速的有限狀態控制。依據上述原理建立的主環有限狀態機如圖7所示。
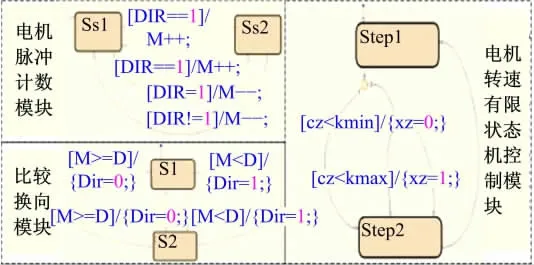
圖7 基于Stateflow的主環有限狀態機控制器Fig.7 Main loop controller with FSM and stateflow
電機轉速的有限狀態機控制流程如圖8所示。控制具體流程如下:①初始化,即調整試驗臺,使其達到前述水平位置,定電機脈沖計數器Mi為0;② 針對目標加速度信號根據式(1)計算兩步進電機需轉動的角度,并換算為一定細分下的轉動步數Di;③ 比較Di和Mi,基于有限狀態機,確定方向信號Diri和脈沖周期信號Periodi,并在電機動作的同時,得到電機實際脈沖矢量和Mi;④工控機相應數字輸出端口將信號輸出到電機驅動器,完成角位移跟隨。
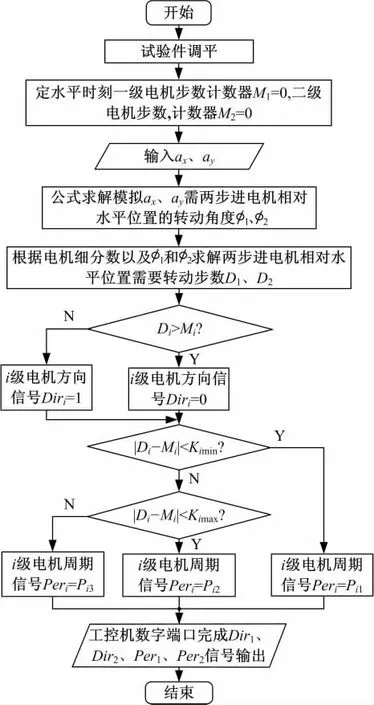
圖8 目標模擬量ax、ay跟隨的電機控制流程圖Fig.8 Control flow chart about following target signals ax、ay
3 仿真與實驗分析
為了驗證本文設計系統的有效性,將自主開發的車輛狀態Matlab仿真模型嵌入HIL試驗臺,進行硬件在環試驗,仿真模型如圖9所示。
結合國家有關汽車性能檢測法規[13-14]以及常見電控系統,如TCS(Traction control system)、ABS(Anti-lock brake system)、ESP(Electronic stability program)等工作和測試工況,選擇1s內達到0.6 g/(m·s-2)的縱向加速度信號為目標縱向加速度信號。若HIL試驗臺可以較好地實現上述工況下的縱向加速度模擬,則對大部分縱向加速度信號都可以實現較好地模擬跟隨。對于側向加速度信號,結合單移線、雙移線等典型工況的側向加速度變化情況,采用幅值較大的正弦信號作為目標側向加速度信號進行跟隨。
圖10~圖12為僅采用方向控制下的第二級電機的實時變化的目標轉動步數D2和實際轉動步數M2的時間歷程圖、換向信號Dir2以及實際傳感器采集信號/目標信號對比圖。從圖10可以看出:電機步數可以較好地跟隨,但從圖11和圖12可以看出:實際過程中換向過于頻繁,導致電機負荷較大且跟隨信號波動較大,無法很好地滿足信號跟隨要求。

圖9 基于Stateflow控制的simulink模型圖Fig.9 Diagram of Simulink with stateflow control
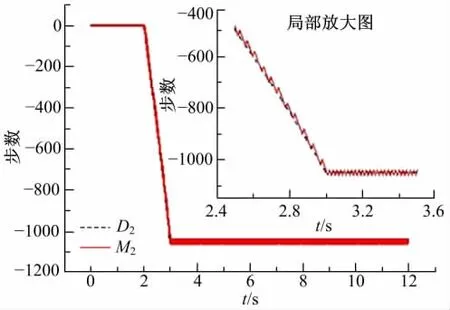
圖10 僅方向控制下的電機步數跟隨效果圖Fig.10 Effect drawing of steps following with motor direction control only
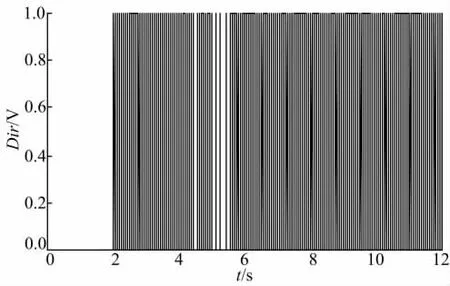
圖11 僅方向控制下的電機換向信號圖Fig.11 Effect drawing of reversing signals with motor direction control only
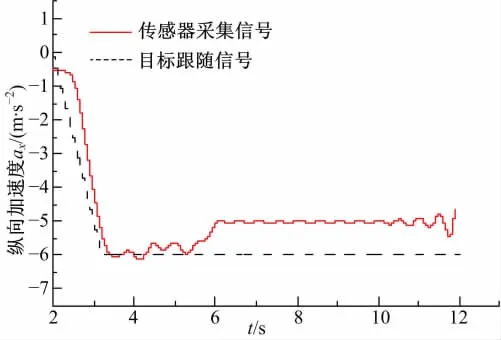
圖12 僅方向控制下的目標/實際信號對比圖Fig.12 Contrasting pattern between target and practical signals with motor direction control only
圖13 和圖14為本文提出的有限狀態機控制算法控制下的第二級電機D2和M2時間歷程圖和方向信號Dir2圖。
圖15和圖16為第一級電機D1和M1時間歷程圖和方向信號Dir1圖。從圖可知,信號跟隨效果較好,并且大大減少了換向的次數。通過基于有限狀態機的速度控制,在一定延時范圍內,實現了實際信號對理想信號較好的跟隨,且只在目標信號換向時改變方向。為了檢測實際加速度模擬情況,本文通過安裝于試驗平臺上的加速度信號傳感器對實時模擬加速度信號進行采集,經過濾波處理得到實際加速度信號,該加速度信號可認為是HIL試驗過程中作用于ECU的整車狀態信號。通過實際傳感器信號和目標給定信號的對比,驗證了HIL試驗臺動作以及控制算法的有效性。圖17為目標縱向加速度信號與經HIL試驗臺模擬后,通過傳感器采集的縱向加速度信號對比圖。圖18為目標縱向加速度和側向加速度信號與經HIL試驗臺模擬后,通過傳感器采集的真實縱向加速度與側向加速度信號對比圖。
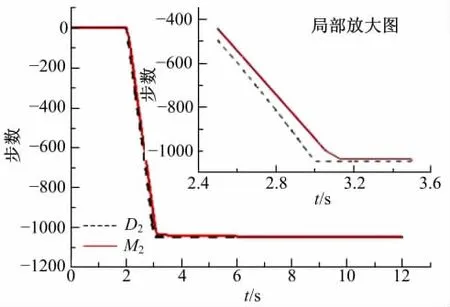
圖13 有限狀態機控制下的二級電機步數跟隨圖Fig.13 Step following map about motor with FSM control
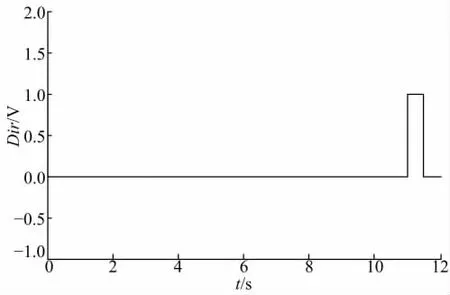
圖14 有限狀態機控制下的二級電機換向信號圖Fig.14 Diagram of reversing signals about second order motor with FSM control
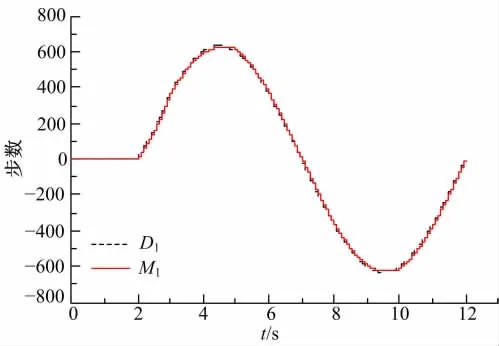
圖15 有限狀態機控制下的一級電機步數跟隨圖Fig.15 Step following map about frist order motor with FSM control
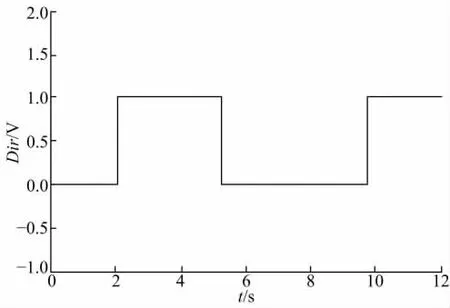
圖16 有限狀態機控制下的一級電機換向信號圖Fig.16 Diagram of reversing signals about frist order motor with FSM control
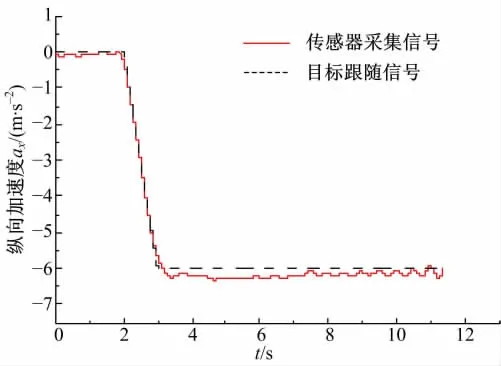
圖17 目標/實際縱向加速度對比圖Fig.17 Contrasting pattern between target and practical lateral acceleration signals
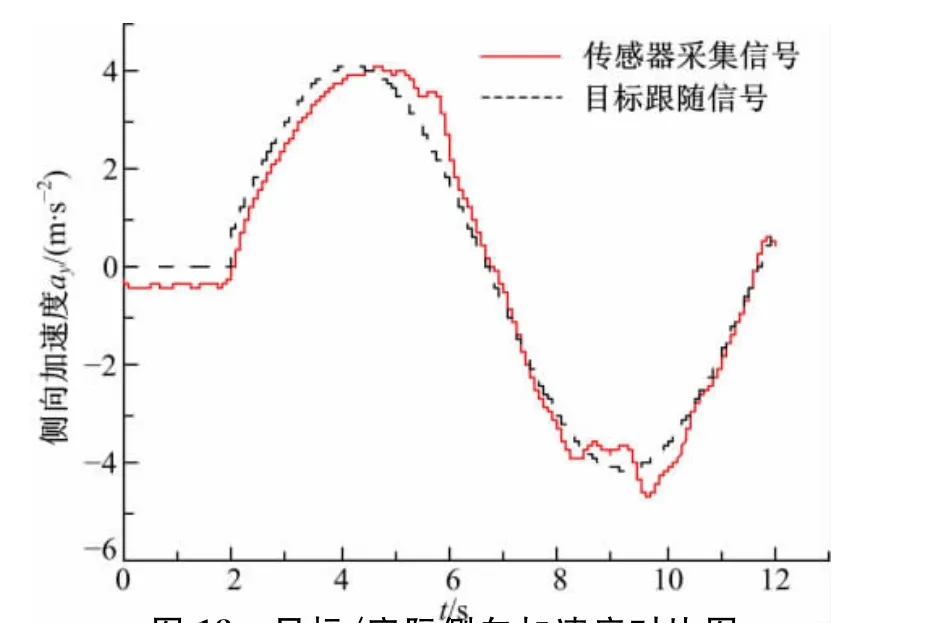
圖18 目標/實際側向加速度對比圖Fig.18 Contrasting pattern between target and practical longitudinal acceleration signals
由圖17和圖18可知:實際經過縱向和側向加速度傳感器采集回的信號與目標信號吻合較好,本文提出的有限狀態機控制下的HIL試驗臺可以較好地實現整車目標信號的跟隨。
4 結 論
(1)為了更真實地進行ECU開發,提出了一種成本相對較低的HIL試驗臺,可用于模擬整車運動狀態。
(2)基于多級轉速和方向控制的步進電機實時角位移跟隨控制算法可以大大減少換向次數和沖擊,提出了一種新的步進電機使用和控制方法,并經過離線試驗以及硬件在環試驗驗證了其有效性。
(3)通過實際傳感器采集的信號與目標信號的對比,驗證了本文提出的HIL試驗臺以及控制算法的可行性和有效性,為了更真實的ECU開發以及其他類似運動模擬和電機的控制提出了一種可行的方案。
[1]李靜,李幼德,趙健,等.汽車驅動硬件在環試驗平臺研究[J].汽車工程,2005,27(1):64-67.Li Jing,Li You-de,Zhao Jian,et al,A hardwarein-the-loop test bench for traction control system[J].Automotive Engineering,2005,27(1):64-67.
[2]Alles S,Swick C,Hoffman M,et al.A real-time hardware-in-the-loop vehicle simulator for traction assistant[J].International Journal of Vehicle Design,1994,15(6):159-164.
[3]李幼德,劉巍,李靜,等.汽車穩定性控制系統硬件在環仿真[J].吉林大學學報:工學版,2007,37(4):737-740.Li You-de,Liu Wei,Li Jing,et al.Hardware-inloop simulation of vehicle stability control system[J].Journal of Jilin University (Engineering and Technology Edition),2007,37(4):737-740.
[4]Oral H A.The tool for control algorithm development of an active vehicle suspension using hardwarein-the-loop[C]∥SAE paper,2002-01-1597.
[5]Pischinger S,Lang O,Kindl H.Development of fuel cell system air management utilizing tools[C]∥SAE paper2002-01-0409.
[6]Wilkinson J,Mousseau C W,Klingler T.Brake response time measurement for a HIL vehicle dynamics simulator[C]∥SAE paper,2010-01-0079.
[7]Witter H J,zur Heiden M,Talwar K.ABS/ESP ECU testing with sophisticated HIL simulation methods[C]∥SAE paper,2009-26-079.
[8]劉巍,趙向東,李幼德,等.ESP硬件在環試驗平臺的研究與開發[J].汽車工程,2007,29(9):809-811.Liu Wei,Zhao Xiang-dong,Li You-de,et al.The study and development of the hardware-in-the-loop simulation platform for ESP[J].Automotive Engineering,2007,29(9):809-811.
[9]Schuette Herbert,Waeltermann Peter.Hardwarein-the-loop testing of vehicle dyramics controllers—a technical survey[C]∥SAE Paper,2005-01-1660.
[10]趙顯紅,孫立功.一種數字式步進電動機閉環位置控制系統設計[J].微電機,2008,41(8):90-92.Zhao Xian-hong,Sun Li-gong.A design of digital closed loop position control system[J].Micromotors,2008,41(8):90-92.
[11]李君凱.步進電機控制系統[J].自動化與儀器儀表,2003(1):15-16,43.Li Jun-kai,The control system of stepping motor[J].Automation and Instrumentation,2003(1):15-16,43.
[12]武志杰,郭洪艷,柳致海,等.基于xPC Target的汽車動力學HIL仿真系統設計[J].控制工程,2011,18(4):610-613.Wu Zhi-jie,Guo Hong-yan,Liu Zhi-hai,et al.Design of the vehicle dynamic HIL simulation system based on xPC target[J].Control Engineering of China,2011,18(4):610-613.
[13]GB12676-1999.汽車制動系統結構、性能和試驗方法[S].
[14]GB7258-2004.機動車運行安全技術條件[S].
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06