無軸承開關磁阻電機缺相運行的控制方法
2013-07-06 12:33:36鄧智泉趙麗丹
電工技術學報 2013年3期
鄧 旭 鄧智泉 曹 鑫 趙麗丹 錢 婷
(南京航空航天大學航空電源航空科技重點實驗室 南京 210016)
1 引言
無軸承開關磁阻電機(Bearingless Switched Reluctance Motor,BSRM)是利用磁軸承與電機結構的相似性,將磁軸承中的懸浮繞組疊繞在開關磁阻電機(Switched Reluctance Motor,SRM)定子上,通過電力電子和微機控制使其同時具備驅動和磁懸浮支撐功能的一種新型磁懸浮電機。BSRM 除了擁有SRM 固有的優勢外,還解決了電機長時間高速運行所帶來的軸承維護和保養難題[1-6],在航空航天、高速和極端條件下具有重要應用特色[13-15]。
在電機容錯方面,傳統 SRM的研究成果對BSRM 有重要的參考意義。從20 世紀90年代開始,各國學者對SRM 本體和功率變換器容錯進行了深入的研究。目前,關于SRM的容錯研究已從正常運行和容錯運行的性能對比轉變為對電流控制器的優化以及缺相條件下的轉矩補償策略,并關注于減小轉矩脈動和尖峰電流。此外,部分學者將研究重點放在SRM 系統中功率變換器的斷路和短路故障檢測上,完善了整個系統的容錯性能[7-11]。
由BSRM的結構可知,常見的缺相故障包括主繞組斷路、懸浮繞組斷路和兩者同時斷路。這三種故障都將導致懸浮力缺失,需要對其進行補償,不同的是前兩種故障發生時,同相懸浮繞組或主繞組依舊能夠正常開通提供正向轉矩。因此,從輸出轉矩角度而言,主繞組和懸浮繞組同時斷路故障對BSRM 運行的穩定運行影響更大,因此,本文將主要針對此故障下 BSRM的懸浮和旋轉控制展開研究,通過提出懸浮力和轉矩補償策略解決了BSRM在缺相運行下的穩定懸浮和轉矩補償。
2 電機結構及全角度數學模型
本文以一臺三相12/8 極BSRM 為研究對象,電機A 相繞組結構如圖1 所示。文獻[5,6,11,12]推導了電機單相導通的數學模型,以A 相繞組為例,懸浮力和轉矩為


圖1 A 相繞組結構示意圖Fig.1 Configuration of phase A winding
J(θ)在電感上升區域可以表示為

Jt(θ)在電感下降區域可以表示為

式中Fα,Fβ——α和β方向瞬時懸浮力;
Nm,Ns——任一定子極的主繞組和懸浮繞組匝數;
ima,isa1,isa2——A 相主繞組電流和α、β方向的懸浮繞組電流;
Kf——懸浮力系數;
Jt——轉矩系數;
其中Kf,Jt均為關于轉子位置角θ的函數。
3 缺相控制策略
在主繞組斷路故障中,為保證轉子懸浮,缺失的懸浮力需由上一相主繞組和懸浮繞組同時延長導通區間進行補償。設電機旋轉相序為A—B—C,各相輪流導通15°。若C 相主繞組斷路,則懸浮力補償方法下的電流分布如圖2 所示。C 相缺失的懸浮力由B 相延長導通15°提供,從而保證了轉子在完整的電感周期內的連續懸浮。但是,由于延長導通區間位于B 相的負轉矩區,從而導致電機的輸出轉矩進一步減小為正常運行時的1/3。根據式(2)可推導出平均轉矩表達式為


圖2 懸浮力補償策略Fig.2 Compensation strategy of levitation force
式中im,is1,is2——導通相的主繞組電流和α、β 方向的懸浮繞組電流。
圖3 為提前開通策略電流導通示意圖,此策略在懸浮力補償策略的基礎上,將正常相A 相和B 相的主繞組提前開通,從而產生更多的正轉矩以增加缺相運行時的輸出轉矩。其平均轉矩表達式為

式中θon——主繞組開通角。

圖3 提前開通策略Fig.3 Compensation strategy of turn-on in advance
采用懸浮力補償策略時,B 相懸浮電流在正、負轉矩區對稱導通,雖補償了缺失的C 相懸浮力,但轉矩損失嚴重。因此,在保證提供相同懸浮力的前提下,應盡量減小補償相在負轉矩區[0,15°]內產生的瞬時轉矩,達到提高平均轉矩的目的。參考文獻[7]提出的獨立控制策略,圖4 為電流優化策略導通示意圖。

圖4 電流優化策略Fig.4 Compensation strategy of current optimization
令電機徑向合成力F為

則合成力F和瞬時轉矩T可表示如下:

根據瞬時轉矩T的表達式,有如下不等式成立

當取最小值時,有

因此,在[0,15°]內產生的最小負轉矩的主繞組電流im2可表示為

則平均轉矩表達式為

式中is12,is22——電流優化區間內α、β方向的懸 浮繞組電流。
圖5 為BSRM的缺相控制框圖。通過光電傳感器檢測出轉子位置后經位置解算得到電機的實時轉速,其與給定轉速的差值經PI 調節器輸出為主繞組 電流。兩個徑向位移經電渦流傳感器轉換為電信號,經PID 調節器輸出為懸浮力給定值和。根據測量值,通過缺相下電流優化算法解算出優化區間內的主繞組電流和懸浮繞組電流和。最后,通過兩套繞組的功率控制器實時跟蹤電流給定值,以實現電機運行時的穩定懸浮。

圖5 缺相系統控制框圖Fig.5 Control diagram of open-phase operation
4 仿真分析
根據提出的缺相控制算法,通過有限元仿真驗證其有效性。仿真模型采用實驗樣機參數見下表。

表 樣機參數Tab. Parameters of the test motor
如圖6 所示,在繞組電流與母線電壓均恒定的情況下,隨著開通角從-15°變化到-22.5°,電機轉速從1 325r/min 增加到1 550r/min,理論計算和有限元仿真結果基本吻合。由圖可知,開通角越前,轉矩的補償趨勢越小,在-20°之前補償不再明顯。因此利用提前開通策略時,開通角選取在[-20°,-15°]之內是合適的。

圖6 開通角與轉速關系(ima=6A、isa1=4A、isa2=2A)Fig.6 Relationship between turn-on angle and speed
為驗證電流優化策略的有效性,本文通過有限元仿真分析產生相同懸浮力的不同電流產生的瞬時負轉矩分布曲線。圖7 中采用了三組不同的電流值,一組是經過電流優化算法得到的值,另兩組是不同的恒定電流值。由圖可見,在保證產生相同懸浮力的情況下,經過優化后的電流產生的瞬時負轉矩最小,因此該算法能夠有效減小負轉矩。

圖7 優化電流與恒值電流產生的轉矩比較Fig.7 Torque comparison of optimized current and constant currents
圖8 所示為正常運行與缺相下一個旋轉周期內的懸浮力、轉矩以及電流的分布對比。其中,A 相的定、轉子齒極對齊位置定義為θa=0°,徑向力給定值分別為30N 和60N。由圖8b 可知,懸浮力補償策略可以提供穩定的懸浮力。由圖8c 可知,缺相運行下由于采用了提前開通策略和電流優化策略,轉矩脈動、瞬時負轉矩和懸浮繞組電流平均值都得到了有效控制。

圖8 一個旋轉周期內的懸浮力、轉矩以及電流的分布Fig.8 Levitation force,torque and current distribution in a rotation period
5 實驗結果與分析
本文對所提出的BSRM 缺相運行控制方法進行了實驗驗證,實驗樣機結構參數見上面表。圖9 所示為樣機的實物照片,其中轉速信號由光電傳感器獲得。由于轉子重力的影響,近似于對電機轉子在β方向施加了一個5kg的徑向負載。

圖9 電機外觀圖Fig.9 Photograph of the test motor
本文分別實現了提前開通策略下和電流優化策略下的穩定懸浮。圖10~圖12 分別為正常運行、提前開通策略下和電流優化策略下穩定懸浮時的電流波形。由圖可見,在缺相情況下,利用提前開通策略時,為了達到與正常運行相同的轉速,主繞組和懸浮繞組電流都相應地增大,而采用電流優化控制策略之后,主繞組電流的平均值明顯減小。
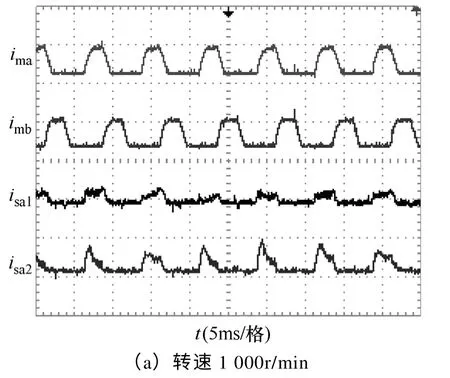

圖10 正常運行的電流波形(圖中電流均為6.66A/格)Fig.10 Current waveforms of normal operation


圖11 采用提前開通策略的電流波形(圖中電流均為6.66A/格)Fig.11 Current waveforms of opening in advance strategy

圖12 采用電流優化策略的電流波形(圖中電流均為6.66A/格)Fig.12 Current waveforms of current optimization strategy
圖13 為樣機缺相下的兩種控制策略對應的懸浮波形和正常運行時的懸浮波形,可以看出缺相下的懸浮精度和正常運行基本持平,說明提前開通策略和電流優化策略都能保證電機良好的懸浮性能。

圖13 懸浮波形Fig.13 Levitation waveforms
為測試電機缺相時的工作性能,進行了徑向敲擊實驗和升速試驗。徑向敲擊實驗波形如圖14 所示,α和β方向的位移由于敲擊而分別偏離中心位置,此時懸浮繞組電流增大,從而使轉軸被迅速拉回幾何中心。需要指出的是:由于木槌敲擊轉軸時無法保證精確地穿過轉軸幾何中心,圖14 中的兩組波形在非干擾方向也存在較小波動,但電機仍能迅速恢復穩定懸浮。由此可見,缺相運行具有良好的抗干擾能力。

圖14 徑向力突變實驗波形Fig.14 Waveforms of radial force disturbance
圖 15 所示為電機升速實驗波形。在轉速從1 500r/min 升高到2 000r/min的過程中,轉軸的徑向位移波形與轉速恒定時保持一致,而懸浮繞組電流波形在升速過程中也基本保持穩定,說明提前開通策略在轉速變化過程中能夠保持良好的懸浮性能。

圖15 電機升速實驗波形Fig.15 Waveforms of step acceleration with the new control strategy
6 結論
本文研究了無軸承開關磁阻電機的缺相運行及其控制方法。提出了懸浮力補償策略和兩種轉矩補償策略,實現了無軸承開關磁阻電機的缺相懸浮,得到如下結論:
(1)懸浮力補償策略能夠保證電機的穩定懸浮,提前開通策略能有效補償缺相帶來的轉矩缺失;與此同時,電流優化策略也能有效提高平均轉矩幅值。
(2)與正常運行相比,缺相運行仍能保持良好的懸浮精度和動態性能。
[1]Takemoto M,Shimada K,Chiba A,et al.A design and characteristics of switched reluctance type bearingless motors[C].Fourth International Symposium on Magnetic Suspension Technology,Gifu,Japan,1998:49-63.
[2]Amrhein W,Silber S,Nenninger K.Developments on bearingless drive technology[C].8th International Symposium on Magnetic Bearings,Mito,Japan,2002:343-348.
[3]Takemoto M,Chiba A,Fukao T.A feed-forward compensator for vibration reduction considering magnetic attraction force in bearingless switched reluctance motors[C].7th International Symposium on Magnetic Bearings,ETH Zurich,2000:395-400.
[4]Choi B B,Siebert M.A bearingless switched reluctance motor for high specific power applications[C].42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit,Sacramento,CA,2006:4804-4810.
[5]楊鋼.無軸承開關磁阻電動機的基礎研究[D].南京:南京航空航天大學,2008.
[6]曹鑫.12/8 極無軸承開關磁阻電機的研究[D].南京:南京航空航天大學,2010.
[7]Cao X,Deng Z,Yang G,et al.Independent control of average torque and radial force in bearingless switched-reluctance motors with hybrid excitations[J].IEEE Trans.on Power Electronics,2009,24(5):1376-1385.
[8]Arkada A A,Sidani M,Du P.Characterization of SRM drive systems under normal and fault operating condition[C].International Conference LMED,1999:249-251.
[9]Gameiro N S,Cardoso A J M.Fault tolerant control strategy of srm drives[C].International Symposium on Power Electronics,Electrical Drives,Automation and Motion,2008:301-306.
[10]Gameiro N S,Cardoso A J M.Power converter fault diagnosis in SRM drives based on the DC bus current analysis[C].International Conference on Electrical Machines(ICEM),2010:1-6.
[11]Mir S,Islam M S,Sebastian T,et al.Fault-tolerant switched reluctance motor drive using adaptive fuzzy logic controller[J].IEEE Trans.on Power Electronics,2004,19(2):289-295.
[12]鄧智泉,楊鋼,張媛,等.一種新型的無軸承開關磁阻電機數學模型[J].中國電機工程學報,2005,25(9):139-146.Deng Zhiquan,Yang Gang,Zhang Yuan,et al.An innovative mathematical model for a bearingless switched reluctance motor[J].Proceedings of the CSEE,2005,25(9):139-146.
[13]Ooshima M,Takeuchi C.Magnetic suspension performance of a bearingless brushless dc motor for small liquid pumps[J].Electrical Machines and Systems,2009,47(1):72-78.
[14]Asama J,Fukao T,Chiba A,et al.A design consideration of a novel bearingless disk motor for artificial hearts[C].Energy Conversion Congress and Exposition,2009:1693-1699.
[15]Zhou J,Tseng K J.A disk-type bearingless motor for use as satellite momentum-reaction wheel[C].IEEE 33rd Annual Power Electronics Specialists Conference,2002:4(s):1971-1975.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14