配網靜止同步補償器的改進粒子群優化PI控制
2013-07-05 15:17:36冉啟陽張定宇鄭航
電力系統及其自動化學報 2013年5期
關鍵詞:優化
冉啟陽,張定宇,鄭航
(1.重慶電力高等專科學校電力工程系,重慶 400053;2.重慶大學電氣工程學院,重慶 400044)
配網靜止同步補償器的改進粒子群優化PI控制
冉啟陽1,張定宇2,鄭航2
(1.重慶電力高等專科學校電力工程系,重慶 400053;2.重慶大學電氣工程學院,重慶 400044)
控制參數影響著控制器的性能,而采用傳統方法對配網靜止同步補償器(D-STATCOM)的PI控制參數進行整定難以獲得良好的調節和控制效果。從平衡算法的全局搜索與局部搜索能力角度出發,結合橢圓變化特性來選擇慣性權重,提出了改進非線性慣性權重粒子群算法(ELWPSO),以實現D-STATCOM電壓環PI參數的優化。搭建的Matlab模型驗證了算法的有效性,仿真結果表明,該算法所需調整的參數少,收斂速度快,且易于實現,D-STATCOM控制器獲得了良好的動態性能。
粒子群優化;配網靜止同步補償器;比例積分控制;參數優化
比例積分PI(proportional intergral)控制器算法簡單、可靠性高而且魯棒性能強,被廣泛應用于實際工業生產中。其控制參數KP、KI影響著控制器的控制性能。合適的控制參數可以實現良好的控制性能。常規的PI控制器參數整定方法,如穩定邊界法(臨界比例度法)、衰減曲線法、動態特性法和Ziegler-Nichols經驗公式法(ZN公式法)等,大多是對經驗的總結,難以獲得最優解。整定過程也相對繁雜、整定參數難以實現最優,導致控制性能不良,容易產生震蕩和大超調[1~4]。隨著智能領域的快速發展,智能技術被用到參數整定中來解決傳統方法的不足。粒子群優化PSO(particle swarm optimization)算法作為智能優化算法之一,其原理簡單、所需調整參數少、收斂速度快且易于實現的優點被用于解決許多全局優化問題[5~7]。
本文根據粒子群算法特點,從平衡算法的全局搜索與局部搜索能力角度出發,結合橢圓變化特性來選擇慣性權重,對粒子群算法進行改進。將改進的粒子群算法用于配網靜止同步補償器DSTATCOM(distribution static synchronous compensator)外環電壓環PI控制參數的優化整定,用粒子的位置代表PI控制器的參數,粒子的適應度值代
表控制參數所對應的控制效果評價函數值,通過迭代運算進行尋優,找到個體最優解和群體最優解,進而找到最優控制參數,從而實現D-STATCOM控制器良好的動態性能。
1 D-STATCOM控制系統
靜止同步補償器通過大功率電力電子器件的高頻開關實現無功能量的變換,從而實現動態無功補償的功能[1]。本文選擇電壓型橋式主電路靜止同步補償器進行研究,其基本結構如圖1所示。
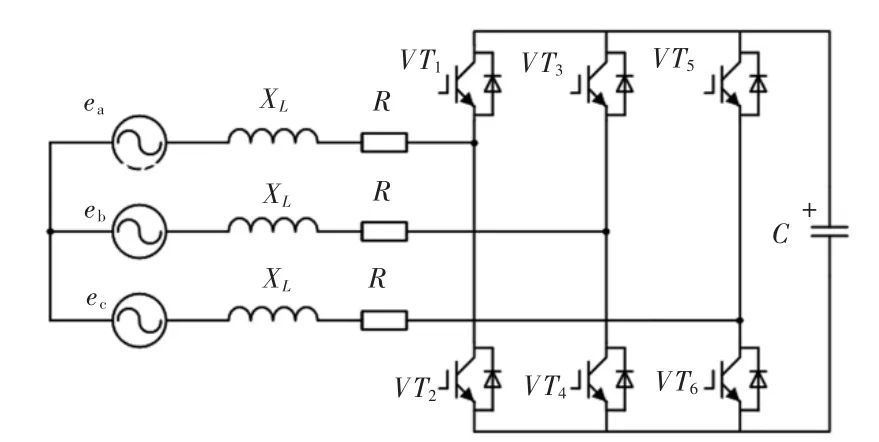
圖1 D-STATCOM的電路基本結構Fig.1 Basic circuit structure of D-STATCOM
由圖1可知,D-STATCOM實質上是直流側不帶負載的PWM變流器。假設電網電壓為三相對稱正弦波電壓,網側濾波電感線性不飽和。則采用開關函數在dq坐標系下進行裝置級數學建模[8,9],即
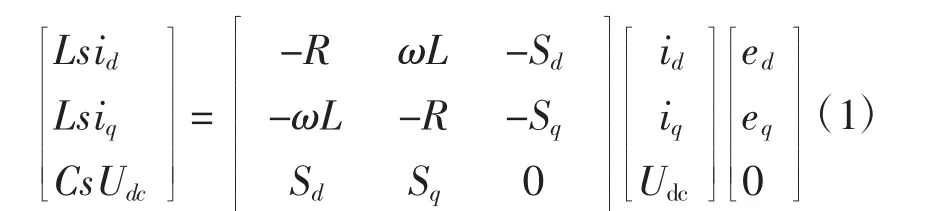
式中:Sd、Sq為dq坐標系下的開關函數;Udc為直流側電壓;ed、eq分別為電網電壓的d軸和q軸分量。
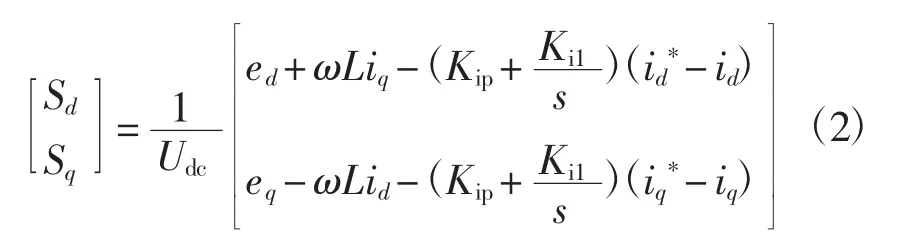
對于小容量靜止同步補償器[9,10],常選擇直接電流控制方法。由式(1)可知,有功電流分量和無功電流分量存在耦合,故采用前饋解耦控制策略,控制方程為
其系統控制框圖如圖2所示。控制系統采用雙閉環控制方法,其中內環為電流環控制,外環為電壓環控制。3個PI控制器的控制參數KP、KI影響著控制器的控制性能,整定獲得合適的控制參數,可實現良好的控制性能。
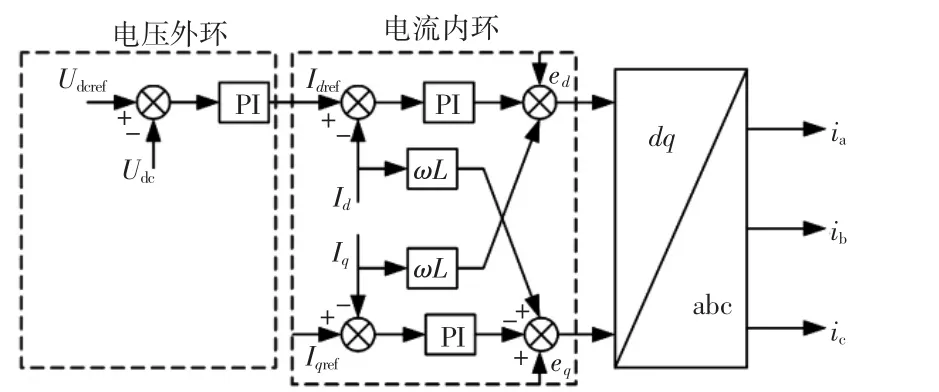
圖2 系統控制框圖Fig.2 System controlblock diagram
2 改進的粒子群算法
傳統的粒子群算法容易陷入局部最優,其收斂速度也比較慢,搜索的精度不高[11],因此,需要對傳統的粒子群算法進行改進。
2.1 標準粒子群算法
2.1 .1 基本原理
假設在一個D維的搜索空間,由n個粒子組成一個種群為X=(X1,X2,…,Xn),其中Xi表示一個D維向量,Xi=(xi1,xi2,…,xiD)T,代表該粒子在D維搜索空間中的位置,即問題的一個潛在解。其對應速度為vi=(vi1,vi2,…,viD)T,對應的個體極值為Pi=(Pi1,Pi2,…,PiD)T,種群的群體極值為Pg=(Pi1,Pi2,…,PiD)T。
根據適應度函數計算出每個粒子位置Xi對應的適應度值。在每次迭代過程中,粒子通過個體極值和群體極值更新自身的速度和位置,即

式中:d=1,2,…,D;i=1,2,…,n;k為當前迭代次數;c1和c2為加速度因子,為非負常數;r1和r2為分布于[0,1]區間的隨機數。為防止粒子的盲目搜索,一般將粒子位置和速度限制在一定的區間[-Xmax,Xmax]、[-vmax,vmax]。慣性權重ω決定粒子上一代速度對本代速度的影響,通過調整ω的大小可以調節PSO算法的全局與局部尋優能力。
2.1.2 算法流程
(1)初始化:設定加速度因子、最大進化代數、位置和速度上下限值。在定義的空間中隨機產生n個粒子組成初始種群X(k);隨機產生各粒子的速度組成速度矩陣v(t);
(2)計算每個粒子在每一維空間的適應值,評價種群X(k);
(3)比較粒子的適應度值和自身最優值Pbest。如果當前值比Pbest小,則置Pbest為當前值,并設Pbest對應位置為粒子當前位置;
(4)比較粒子適應度值與種群最優值Gbest。如果當前值比Gbest更小,則置Gbest為當前值,并設Gbest對應位置為當前位置;
(5)按式(3)和式(4)更新粒子的位置和速度,產生新的種群X(k+1),并重復(2)~(4);
(6)設置終止條件為k達到最大進化代數MaxIter,或者粒子對應度值小于給定精度。當滿足該終止條件時,則結束尋優;否則,k=k+1,轉至(2)。
2.2 改進的粒子群算法
根據橢圓的性質推得一種改進非線性慣性權重粒子群算法ELWPSO(ellipseweight-PSO)。橢圓結構如圖3所示,橢圓切線變化斜率逐漸增大滿足ω應遵循的準則。
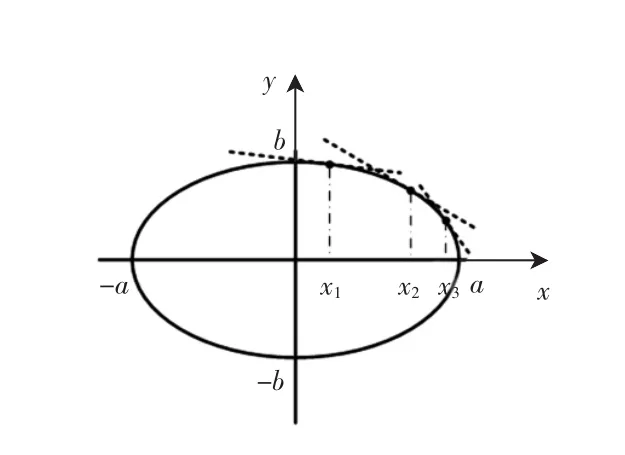
圖3 橢圓特征Fig.3 Characteristicsof elliptic
橢圓表達式為

將慣性權重ω作為縱軸變量,迭代代數k作為橫軸變量,考慮ω取值范圍滿足[0.4,0.9],因而選擇b=0.9,a=Tmax,則式(5)可改寫為


尋優時,選擇的適應度函數為該函數表達式,適應度為函數值。種群大小為20,每個粒子維數為2,算法迭代進化代數為300。仿真得到最優個體適應度值變化為1.005 4,對應的粒子位置為(-4.490 3×10-4,-1.450 8×10-4)如圖4所示。
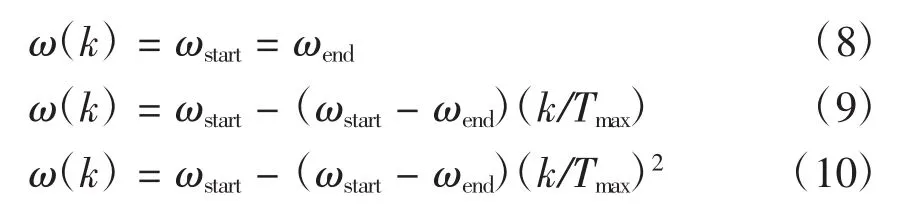
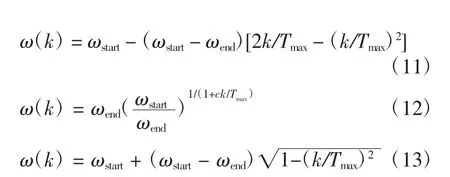
為了比較改進的粒子群算法的收斂精度和收斂速度等性能,分別采用ELWPSO算法和固定慣性權重PSO算法進行尋優。ELWPSO權重公式為
2.3 算例分析
將改進粒子群算法用于極值尋優中,分析其收斂精度和搜索尋優能力,其計算公式為
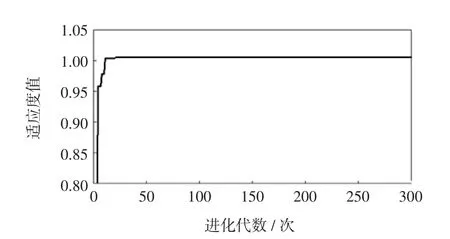
圖4 最優個體適應度值Fig.4 Fitness valuesof themostoptimal individual
每個實驗運行100次,并求出其平均值作為最終結果。通過比較所得的平均值、失效次數和接近最優值的次數來分析算法的收斂精度和收斂速度。函數平均值的收斂曲線如圖5所示。其中,固定慣性權值的算法得到的平均值最低,其求解精度低;而采用本文改進的算法則具有良好的求解精度。各種算法下獲得的性能指標如表1所示。
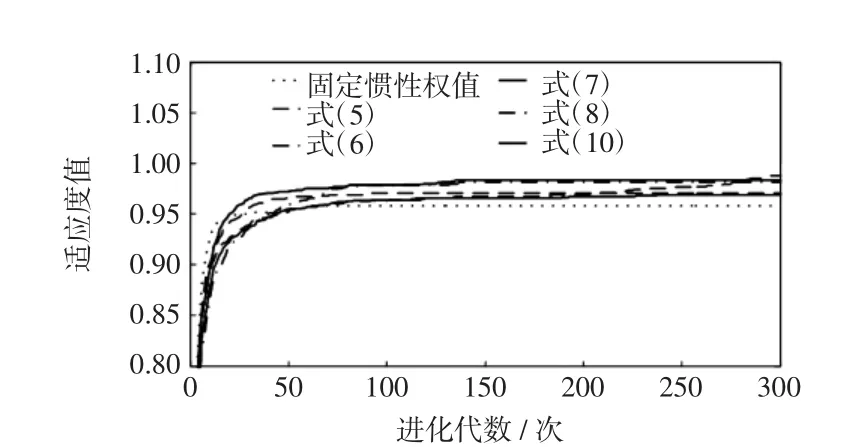
圖5 6種慣性權值函數平均值的收斂曲線Fig.5 Convergence curvesof function averagew ith six kindsof inertiaweight
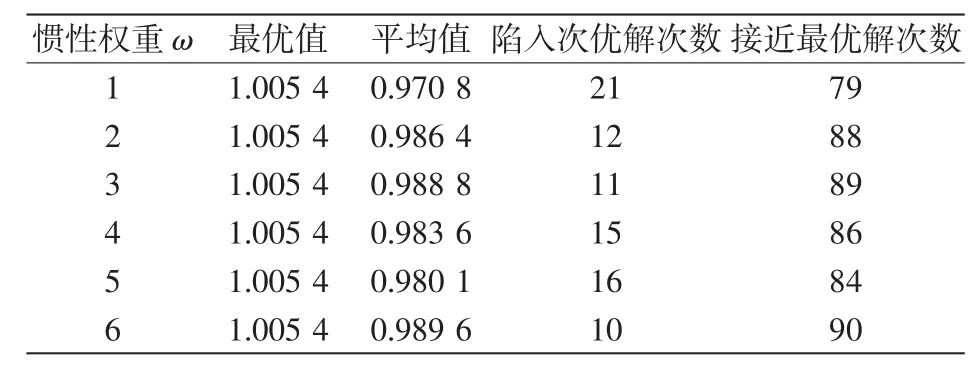
表1 6種慣性權重的算法性能比較Tab.1 Performance evaluation ofalgorithm sw ith six kindsof inertiaweight
通過以上分析可知,本文所提的改進粒子群算法ELWPSO具有良好的全局搜索和局部搜索能力,和其他幾種慣性權重下算法相比,其陷入次優解的次數較少,具有良好的收斂精度和收斂速度。
3 改進粒子群優化外環PI
3.1 改進粒子群優化外環PI
將改進的粒子群算法ELWPSO用于DSTATCOM的外環電壓環PI控制參數的尋優,該方法不需要被控對象的先驗知識,對初值要求不高,計算代價低。PI控制算法公式為
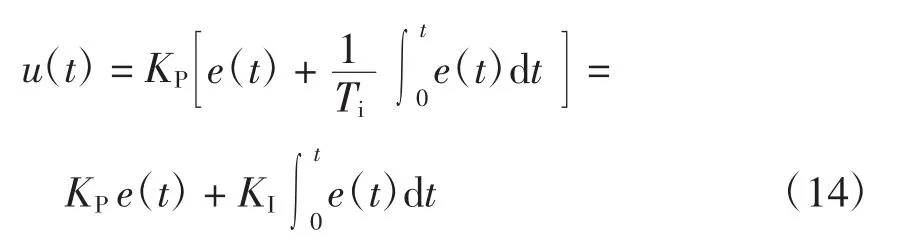
式中:KP為比例系數;Ti為積分時間常數;KI為積分系數。
PSO-PI控制系統原理如圖6所示,其中r(t)為給定輸入,y(t)為系統輸出。根據算法流程,首先確定PI參數范圍、慣性權重上下限、速度和位置上下限、種群數大小和迭代次數等,再選擇合適的適應度函數。
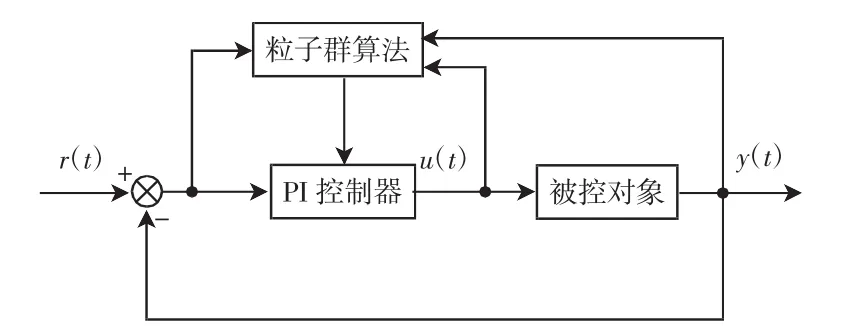
圖6 PSO-PI控制系統原理Fig.6 Principle of PSO-PIcontrolsystem
為了獲得良好的動態性能,通常選擇誤差絕對值時間積分ITAE(integral time avergae error)作為判定控制性能的指標,并取其倒數作為適應度函數J,即e(t)為誤差;u(t)為控制輸出量;tr為上升時間;ey(t)=y(t)-y(t-1)用來控制超調量。
3.2 系統仿真分析
在Matlab中進行仿真,將ELWPSO算法用于D-STATCOM中進行控制參數優化分析。仿真系統參數為:D-STATCOM裝置容量SN=300 kvar;電壓源電壓為6 kV;變壓器為星三角結構,變比為6 000/400;負載為:UL=400 V,P=463 kW,QL= 250 kvar。D-STATCOM相關參數為:R=0.02Ω,L=1.0mH,C=4 000μF。
采用S函數編寫PSO算法程序段尋求KP、KI參數最優值,以獲得良好的控制性能。由DSTATCOM數學模型可知,對其進行前饋解耦控制時,內環電流環可以等效為一個慣性環節[8],即

當忽略主電路自身損耗時,考慮靜止同步補償器的交流側和直流側瞬時功率平衡[8],則

式中,ud、uq分別是D-STATCOM的交流側電壓d、q軸分量,ud=SdUdc,uq=SqUdc。
設dq坐標系的d軸和電網電壓矢量u重合,則uq=0,式(18)變為

外環控制系統如圖7所示。其中被控對象的數學模型為


一個好的控制系統應具有良好的穩定性、快速性和準確性。本文為了保證控制系統具有良好的穩定性、較小的超調量和較快的響應速度,對式(15)進行改進,即引入加權系數,在式中加入控制輸入的平方項,以免控制能量過大;并引入超調分量加以控制約束。最終選擇的性能指標為
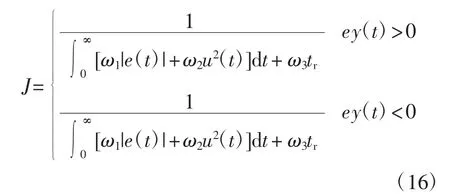
式中:ωi(i=1,2,3,…)為加權系數,其中ω4?ω1;
ELWPSO算法中選擇粒子群大小為30,最大迭代次數為100,初始慣性權值為0.9,終止慣性權值為0.4,加速因子c1=c2=2,速度范圍設定為[-1,1],KP取值范圍為[0,10],KI取值范圍為[0,1.0]。ω1=0.999,ω2=0.001,ω3=100,ω4=2。

圖7 電壓外環動態結構Fig.7 Dynam ic structure diagram ofouter voltage loop
優化后的最優參數分別為:KP=3.625 9,KI= 0.026 5,指標J=12.69。優化指標變化曲線如圖8(a)所示,其在41代即可達到最優,具有較快的收斂速度;粒子群30個粒子對應的KP和KI值如圖8(b)所示。采用ELWPSOPI法對應的控制響應曲線如圖9所示,其具有較小的超調量,而且上升時間也要快,具有較快的響應速度。
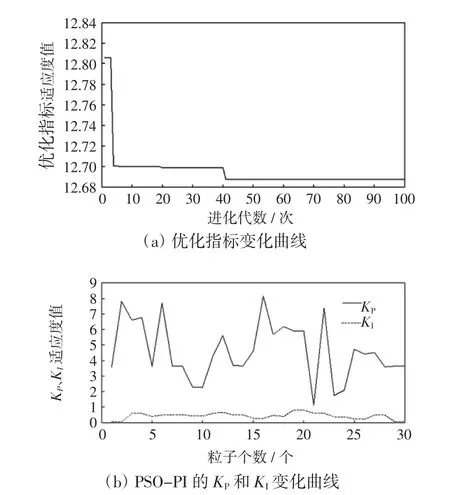
圖8 PSO-PI的優化指標和KP和KI變化曲線Fig.8 Change curvesofoptim ization index of PSO-PI and KPand KIof PSO-PI
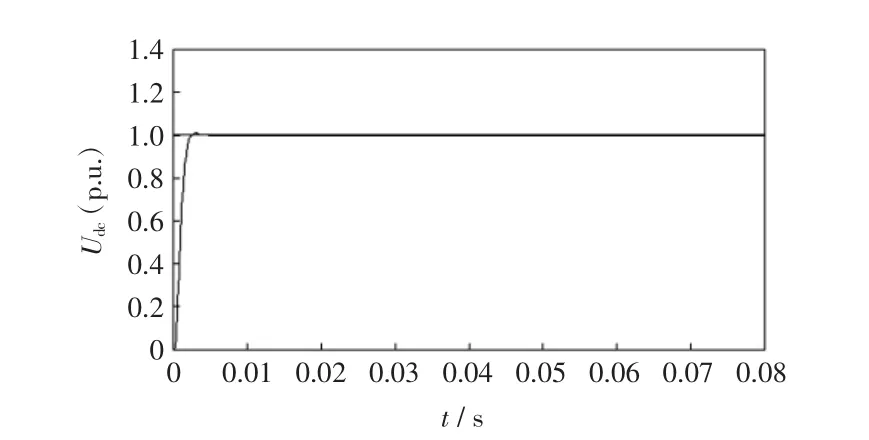
圖9 最優參數對應的控制響應曲線Fig.9 Controlling response curve corresponding to theoptimalparameters
4 結語
本文所提的改進粒子群算法ELWPSO具有良好的全局搜索和局部搜索能力。其陷入次優解的次數較少,具有良好的收斂精度和收斂速度。改進PSO算法應用于D-STATCOM控制系統進行PI參數的整定,克服了傳統PI參數整定方法的不足,可以使得被控對象獲得良好的控制效果,具有較快的響應速度和穩定性能。
[1]王偉,張晶濤,柴天佑(WangWei,Zhang Jingtao,Chai Tianyou).PID參數先進整定方法綜述(A survey ofadvanced PID parameter tuningmethods)[J].自動化學報(Acta Automatica Sinica),2000,26(3):347-355.
[2]羅春松(Luo Chunsong).改進的粒子群算法及其在控制器參數整定中的應用(Improved Particle Swarm Optimization and Its Application in Tuning of Controller Parameters)[D].長沙:湖南大學計算機與通信學院(Changsha:College ofComputer science and Technology,Hunan University),2009.
[3]BennettS.The pastof PID controllers[J].AnnualReviews in Control,2001,25:43-53.
[4]王德強(Wang Deqiang).基于改進粒子群算法的PID控制器參數整定(PIDParameters-Tuning Based on the Modified PSOAlgorithm)[D].南京:南京信息工程大學信息與控制學院(Nanjing:College of information and Control,Nanjing University of Information Science and Technology),2008.
[5]謝曉峰,張文俊,楊之廉(Xie Xiaofeng,ZhangWenjun,Yang Zhilian).微粒群算法綜述(Overview of particle swarm optimization)[J].控制與決策(Control and Decision),2003,18(2):129-134.
[6]楊維,李歧強(YangWei,LiQiqiang).粒子群優化算法綜述(Survey on particle swarm optimization algorithm)[J].中國工程科學(Engineering Science),2004,6(5):87-94.
[7]趙國波,劉天琪(Zhao Guobo,Liu Tianqi).基于混合粒子群優化算法的電力系統無功優化(Reactive power optimization based on hybrid particle swarm optimization algorithm)[J].電力系統及其自動化學報(Proceedings of the CSU-EPSA),2007,19(6):7-11,47.
[8]王兆安,楊君.諧波抑制和無功功率補償[M].北京:機械工業出版社,2005.
[9]徐德鴻.電力電子系統建模及控制[M].北京:機械工業出版社,2006.
[10]金玉潔,毛承熊,王丹,等(Jin Yujie,Mao Chengxiong,Wang Dan,et al).靜止同步補償器的最優控制策略(Optimal control strategy of STATCOM)[J].電力系統及其自動化學報(Proceedingsof the CSU-EPSA),2007,19(5):71-74,97.
[11]金翠云,王建林,馬江寧,等(Jin Cuiyun,Wang Jianlin,Ma Jiangning,etal).改進的PSO算法及其在PID控制器參數整定中的應用(Application of improved PSO for parameter tuning of PID controller)[J].電子測量與儀器學報(Journal of Electronic Measurement And Instrument),2010,24(2):141-146.
Improved Particle Swarm Optim ization PIControl for D-STATCOM
RANQi-yang1,ZHANGDing-yu2,ZHENGHang2
(1.DepartmentofElectric Power Engineering,Chongqing Electric PowerCollege,Chongqing 400053,China;2.College of Electrical Engineering,Chongqing University,Chongqing400030,China)
The controlparametersaffect the performance of the controller.conventionalmethod of PIparameter turning for D-STATCOM is difficult to obtain good effect of regulation and control.Therefore,in view of balancing of global searching algorithm with local search ability,combiningwith elliptic variation characteristics to choose the self-adapting inertia,an improved nonlinear inertiaweight particle swarm algorithm is proposed and used to turn the outer voltage loop PIparameters.The Matlabmodel is built to test the effectiveness of the algorithm.The simulation results show that the presented algorithm needs less parameters,fast convergence rate,easy implementation,and could achieve good dynamic performance of the D-STATCOM controller.
particleswarm optimization(PSO);distribution static synchronous compensator(D-STATCOM);proportional integral(PI)control;parameteroptimization
TM761
A
1003-8930(2013)05-0111-05
冉啟陽(1962—),男,學士,講師,研究方向為過程控制及其自動化。Email:Ranqiyang62@163.com
2013-03-06;
2013-04-25
張定宇(1986—),男,碩士研究生,研究方向為電力電子在電力系統中的應用。Email:zhangdingyuren113@163.com
鄭航(1989—),男,碩士研究生,研究方向為電力電子在電力系統中的應用。Email:hangzheng1989@163.com
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
