基于EKF的渦輪沖壓組合發(fā)動(dòng)機(jī)跟蹤濾波器設(shè)計(jì)
2013-06-28 17:10:41侯營東戴冬紅姜渭宇
燃?xì)鉁u輪試驗(yàn)與研究 2013年6期
侯營東,戴冬紅,姜渭宇
(北京動(dòng)力機(jī)械研究所,北京100074)
基于EKF的渦輪沖壓組合發(fā)動(dòng)機(jī)跟蹤濾波器設(shè)計(jì)
侯營東,戴冬紅,姜渭宇
(北京動(dòng)力機(jī)械研究所,北京100074)
針對渦輪沖壓組合發(fā)動(dòng)機(jī)性能參數(shù)最優(yōu)估計(jì)問題,介紹了一種基于EKF(擴(kuò)展卡爾曼濾波)和在線發(fā)動(dòng)機(jī)實(shí)時(shí)模型相結(jié)合的跟蹤濾波器方案。跟蹤濾波器感知模型輸出與傳感器測量值間的偏差,利用EKF濾波算法動(dòng)態(tài)調(diào)整模型狀態(tài)變量,使模型與發(fā)動(dòng)機(jī)間的狀態(tài)誤差方差最小。仿真結(jié)果表明,在發(fā)動(dòng)機(jī)工作狀態(tài)發(fā)生顯著變化時(shí),基于EKF設(shè)計(jì)的跟蹤濾波器能準(zhǔn)確跟蹤傳感器輸出,對發(fā)動(dòng)機(jī)推力、空氣流量、喘振裕度等參數(shù)有很高的估計(jì)精度。
EKF;渦輪沖壓組合發(fā)動(dòng)機(jī);非線性;最優(yōu)估計(jì);跟蹤濾波器;在線發(fā)動(dòng)機(jī)實(shí)時(shí)模型
1 引言
渦輪沖壓組合發(fā)動(dòng)機(jī)(下面簡稱組合發(fā)動(dòng)機(jī))作為一種重要的天地往返運(yùn)輸系統(tǒng)和高超聲速飛行器的動(dòng)力裝置,主要由渦輪發(fā)動(dòng)機(jī)與沖壓發(fā)動(dòng)機(jī)通過結(jié)構(gòu)和熱力循環(huán)有機(jī)組合而成,在不同飛行馬赫數(shù)下有著不同的工作模態(tài),具有工作狀態(tài)復(fù)雜、飛行包線寬廣等特點(diǎn)。組合發(fā)動(dòng)機(jī)結(jié)構(gòu)和原理復(fù)雜,具有多處燃油供應(yīng)和幾何可調(diào)裝置,控制變量較多且在輸入輸出之間存在嚴(yán)重的耦合,是一種典型的非線性多變量被控對象。
組合發(fā)動(dòng)機(jī)多變量控制器設(shè)計(jì)過程中,被控量的選擇至關(guān)重要。被控量最好能直觀反映發(fā)動(dòng)機(jī)的工作狀態(tài)、安全裕度等信息,且能較好地匹配與飛行器總體的接口需求。對于組合發(fā)動(dòng)機(jī),實(shí)現(xiàn)其直接推力、空氣流量、喘振裕度等參數(shù)的控制,能充分發(fā)揮發(fā)動(dòng)機(jī)的性能優(yōu)勢,是一種比較理想的控制系統(tǒng)設(shè)計(jì)方案。然而實(shí)際應(yīng)用中,上述參數(shù)大多無法直接測量,或由于發(fā)動(dòng)機(jī)結(jié)構(gòu)、工作環(huán)境限制不便直接測量。如何根據(jù)組合發(fā)動(dòng)機(jī)控制輸入和傳感器測量數(shù)據(jù)等已知信息,準(zhǔn)確估計(jì)輸出反饋參數(shù),是實(shí)現(xiàn)多變量控制的一個(gè)關(guān)鍵環(huán)節(jié)[1~4]。
2 EKF濾波方法
卡爾曼濾波(KF)[3,5]由于算法簡單、易于實(shí)現(xiàn),而廣泛應(yīng)用于慣性導(dǎo)航、制導(dǎo)、雷達(dá)通訊等航空航天領(lǐng)域。但其基于線性狀態(tài)空間模型設(shè)計(jì),主要適用于非線性不強(qiáng)的動(dòng)態(tài)系統(tǒng),并不適用于組合發(fā)動(dòng)機(jī)這樣比較復(fù)雜的非線性系統(tǒng)。擴(kuò)展卡爾曼濾波(EKF)是一種在線性卡爾曼濾波基礎(chǔ)上發(fā)展起來的非線性濾波方法,其核心思想是圍繞狀態(tài)估計(jì)對非線性系統(tǒng)進(jìn)行一階泰勒展開,然后再應(yīng)用線性系統(tǒng)卡爾曼濾波器算法。
考慮如式(1)所示的非線性離散系統(tǒng):

式中:x∈Rn為系統(tǒng)狀態(tài)向量;y∈Rm為系統(tǒng)輸出向量;u為已知控制輸入;vk、wk分別為相互獨(dú)立的過程噪聲和測量噪聲,一般被假設(shè)為零均值的高斯白噪聲,其協(xié)方差矩陣分別為Q和R

EKF計(jì)算前需給定的初始條件,包括動(dòng)態(tài)系統(tǒng)狀態(tài)的初值x?0和狀態(tài)的初始協(xié)方差矩陣Px0:

在每個(gè)計(jì)算周期內(nèi),EKF算法主要包括以下五步:
(1) 狀態(tài)先驗(yàn)估計(jì)。狀態(tài)先驗(yàn)估計(jì)是根據(jù)非線性系統(tǒng)狀態(tài)方程描述,利用先驗(yàn)知識對狀態(tài)進(jìn)行一步預(yù)測:

(2)誤差協(xié)方差矩陣先驗(yàn)更新。對于式(1)中的狀態(tài)方程,在估計(jì)值x?k-1附近進(jìn)行泰勒展開,忽略二階及以上數(shù)值項(xiàng)可得狀態(tài)轉(zhuǎn)移的線性描述,如式(6)所示:

定義狀態(tài)轉(zhuǎn)移矩陣Φk,k-1:

由Φk,k-1可得先驗(yàn)估計(jì)后對應(yīng)的狀態(tài)誤差協(xié)方差矩陣Px(k |k-1):

(3) 計(jì)算卡爾曼增益矩陣。對于式(1)中的輸出方程,在先驗(yàn)估計(jì)值x?k|k-1附近進(jìn)行泰勒展開,忽略二階及以上數(shù)值項(xiàng)可得觀測輸出的線性描述,如式(9)所示:
定義輸出傳遞矩陣Hk:

可得卡爾曼濾波器增益矩陣Kk:

(4) 狀態(tài)后驗(yàn)估計(jì)。根據(jù)步驟(3)得到的Kk,利用觀測輸出與測量值間的偏差進(jìn)一步修正濾波器狀態(tài):

(5) 誤差協(xié)方差矩陣更新。更新后驗(yàn)估計(jì)后的誤差協(xié)方差矩陣,作為下一計(jì)算周期的協(xié)方差初值:

3 跟蹤濾波器設(shè)計(jì)
不失一般性,組合發(fā)動(dòng)機(jī)動(dòng)態(tài)行為可表示為如下通用形式:

式中:x為發(fā)動(dòng)機(jī)狀態(tài)向量,均為EKF待估計(jì)參數(shù);u為發(fā)動(dòng)機(jī)輸入向量,包括主燃燒室和超級燃燒室燃油流量、各幾何可調(diào)機(jī)構(gòu)面積和位置、飛行高度和馬赫數(shù)等;y為發(fā)動(dòng)機(jī)測點(diǎn)傳感器測量輸出變量,包括各截面的溫度、壓力,發(fā)動(dòng)機(jī)傳感器測量方案應(yīng)保證y對x具有較好的可觀性;θ為組合發(fā)動(dòng)機(jī)中一些不可測性能參數(shù),包括發(fā)動(dòng)機(jī)推力、空氣流量、喘振裕度等。
在組合發(fā)動(dòng)機(jī)工作過程中,u為已知信息,跟蹤濾波器設(shè)計(jì)的關(guān)鍵是準(zhǔn)確估計(jì)系統(tǒng)中的x,使其估計(jì)值x?能準(zhǔn)確反映發(fā)動(dòng)機(jī)的真實(shí)狀態(tài)。獲得x?后,可根據(jù)計(jì)算推力、空氣流量、安全裕度等相關(guān)發(fā)動(dòng)機(jī)性能參數(shù)。
為準(zhǔn)確估計(jì)組合發(fā)動(dòng)機(jī)狀態(tài),考慮到系統(tǒng)非線性特性、系統(tǒng)過程噪聲、傳感器測量噪聲等因素影響,采用了一種基于EKF和在線發(fā)動(dòng)機(jī)實(shí)時(shí)模型的跟蹤濾波器結(jié)構(gòu),如圖1所示。
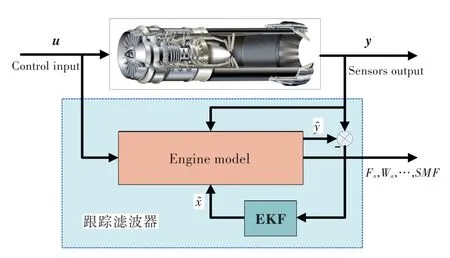
圖1 組合發(fā)動(dòng)機(jī)跟蹤濾波器結(jié)構(gòu)框圖Fig.1 Structure diagram of tracking filter for TBCC
在線發(fā)動(dòng)機(jī)實(shí)時(shí)模型的作用,是在給定u和x?的條件下,對組合發(fā)動(dòng)機(jī)傳感器測點(diǎn)對應(yīng)截面的溫度、壓力等參數(shù)y?進(jìn)行解算,同時(shí)根據(jù)式(15)計(jì)算所需不可測性能參數(shù)。根據(jù)組合發(fā)動(dòng)機(jī)測量方案,選取可觀性較好的y用于EKF濾波計(jì)算[4],另外選取一些精度和可靠性較高的y直接參與實(shí)時(shí)模型計(jì)算。
EKF感知組合發(fā)動(dòng)機(jī)模型輸出y?與傳感器測量值y間的偏差,結(jié)合系統(tǒng)描述式(14),按式(5)~式(13)的計(jì)算步驟動(dòng)態(tài)調(diào)整x?,使在線發(fā)動(dòng)機(jī)實(shí)時(shí)模型與真實(shí)發(fā)動(dòng)機(jī)間的狀態(tài)誤差方差最小。當(dāng)x?能真實(shí)反映x時(shí),y?將準(zhǔn)確跟蹤相應(yīng)的y值,此時(shí)根據(jù)計(jì)算出的發(fā)動(dòng)機(jī)推力、空氣流量、安全裕度等性能參數(shù),即被認(rèn)為可代表真實(shí)發(fā)動(dòng)機(jī)的推力、空氣流量和安全裕度。
4 仿真分析
為檢驗(yàn)跟蹤濾波器的穩(wěn)定性,全面考核跟蹤濾波器在組合發(fā)動(dòng)機(jī)不同工作狀態(tài)下的跟蹤精度,仿真時(shí)選用組合發(fā)動(dòng)機(jī)動(dòng)態(tài)數(shù)學(xué)模型替代實(shí)際的發(fā)動(dòng)機(jī),并根據(jù)傳感器的測量精度,在動(dòng)態(tài)模型輸出參數(shù)中加入幅值不等的高斯白噪聲。
進(jìn)行跟蹤濾波器計(jì)算前,首先確定組合發(fā)動(dòng)機(jī)動(dòng)態(tài)系統(tǒng)的過程噪聲協(xié)方差矩陣Q和傳感器測量噪聲協(xié)方差矩陣R,仿真開始1 s后起動(dòng)跟蹤濾波器。設(shè)定組合發(fā)動(dòng)機(jī)在0~15 s工作在混排渦扇模態(tài),在第15 s打開模態(tài)轉(zhuǎn)換閥,同時(shí)階躍改變主燃燒室燃油流量、超級燃燒室燃油流量及各調(diào)節(jié)機(jī)構(gòu)的位置和面積,使組合發(fā)動(dòng)機(jī)在15~30 s工作在渦輪沖壓模態(tài)。

圖2 跟蹤濾波器對發(fā)動(dòng)機(jī)測量參數(shù)的跟蹤響應(yīng)曲線Fig.2 Response curve of tracking filter for engine measure parameters
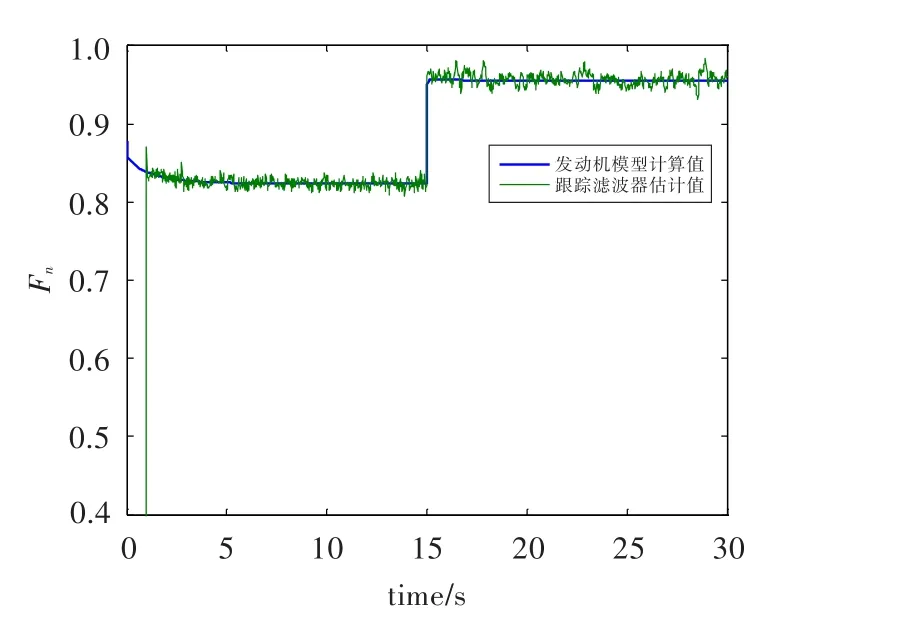
圖3 計(jì)算推力與估計(jì)推力的對比曲線Fig.3 Comparison of the calculated and estimated engine thrust
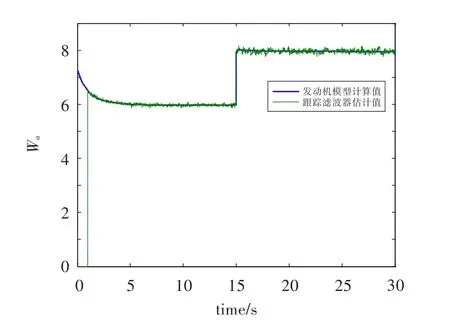
圖4 計(jì)算空氣流量與估計(jì)空氣流量的對比曲線Fig.4 Comparison of the calculated and estimated mass flow
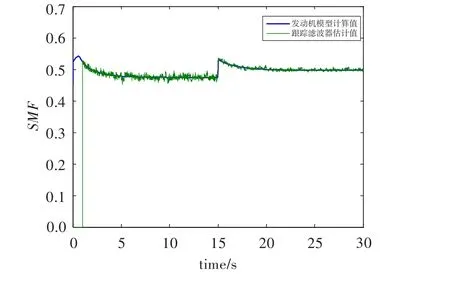
圖5 計(jì)算喘振裕度與估計(jì)喘振裕度的對比曲線Fig.5 Comparison of the calculated and estimated surge margin
仿真結(jié)果如圖2~圖5所示。從圖2中的對比曲線可看出,跟蹤濾波器在組合發(fā)動(dòng)機(jī)工作狀態(tài)顯著變化時(shí),能克服傳感器測量噪聲等不利因素影響,快速、準(zhǔn)確地調(diào)整濾波器狀態(tài),使在線實(shí)時(shí)模型相應(yīng)截面的溫度、壓力等輸出參數(shù)與實(shí)際發(fā)動(dòng)機(jī)傳感器的測量數(shù)據(jù)一致,跟蹤相對誤差均在±3%以內(nèi)。從圖3~圖5中可看出,跟蹤濾波器能準(zhǔn)確估計(jì)出發(fā)動(dòng)機(jī)推力、空氣流量、喘振裕度等不可測參數(shù),能準(zhǔn)確反映發(fā)動(dòng)機(jī)的真實(shí)特性。
5 結(jié)論
針對組合發(fā)動(dòng)機(jī)不可測參數(shù)的估計(jì)問題,本文采用了一種基于EKF和在線發(fā)動(dòng)機(jī)實(shí)時(shí)模型相結(jié)合的跟蹤濾波器設(shè)計(jì)方案,并詳細(xì)介紹了EKF濾波計(jì)算方法及跟蹤濾波器的設(shè)計(jì)方法。仿真結(jié)果表明,在組合發(fā)動(dòng)機(jī)工作狀態(tài)顯著變化時(shí),跟蹤濾波器能有效克服測量噪聲等不利因素影響,實(shí)現(xiàn)對傳感器輸出的快速、準(zhǔn)確跟蹤,估計(jì)出的傳感器不可測參數(shù)項(xiàng)能準(zhǔn)確反映組合發(fā)動(dòng)機(jī)的真實(shí)狀態(tài),可為多變量控制器提供品質(zhì)較好的輸出反饋參數(shù)。
[1] Demranis A,Sanso F.Nonlinear estimation problems for nonlinear models[J].Manuscript Geodaetica,1995,20:110—122.
[2] Simon D,Simon D L.Aircraft Turbofan Engine Health Es?timation Using Constrained Kalman Filtering[R].NASA TM-2003-212528,ASME GT2003-38584,2003.
[3] Alag G S,Gilyard G B.A Proposed Kalman Filter Algo?rithm for Estimation of Unmeasured Output Variables for an F100 Turbofan Engine[R].NASA TM-4234,AIAA 1990-1920,1990.
[4] 趙連春,Mattingly J D.飛機(jī)發(fā)動(dòng)機(jī)控制—設(shè)計(jì)、系統(tǒng)分析和健康監(jiān)視[M].北京:航空工業(yè)出版社,2011.
[5] 鄧自立.卡爾曼濾波與維納濾波—現(xiàn)代時(shí)間序列分析方法[M].哈爾濱:哈爾濱工業(yè)大學(xué)出版社,2001.
Tracking Filter Design for Turbine Based Combined Cycle Engine Based on EKF
HOU Ying-dong,DAI Dong-hong,JIANG Wei-yu
(Beijing Power Machinery Institute,Beijing 100074,China)
In order to get the optimal estimation of performance parameters for turbine based combined cy?cle engine(TBCC),a tracking filter design plant based on extended kalman filter(EKF)and real time on-line engine model was introduced.The tracking filter can dynamically adjust model states according to the errors between on-line engine model outputs and sensor measured values.The variance of state errors can be minimized because of the EKF adjustment.The simulation results show that filter outputs can trace sensor measured values quickly and precisely while engine operate conditions were changed greatly.Mean?while,engine unmeasured parameters,just like engine thrust,mass flow and surge margin,were calculated with high accuracy.
extended Kalman filter;TBCC engine;nonlinear;optimal estimation;tracking filter;real time on-line engine model
V236
A
1672-2620(2013)06-0057-04
2013-11-29;
2013-12-20
侯營東(1984-),男,山東鄆城人,工程師,研究方向?yàn)榘l(fā)動(dòng)機(jī)控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
