車載智能軌道巡檢系統的研究與應用
2013-06-21 07:00:18聶海麗上海鐵路局科研所
上海鐵道增刊 2013年1期
聶海麗 上海鐵路局科研所
隨著高速鐵路的發展,鐵路檢測設備已經由靜態檢測發展到動態檢測,由接觸式檢測發展到非接觸式檢測,由低速運行狀態檢測發展到高速運行狀態檢測。目前國外發達國家已成功地將CCD高速攝像技術應用于鐵路軌道動態檢測,大大提高了軌道檢測的速度和精度。
國內近年來也不斷引進、消化國外先進的高速軌道檢測技術,但國內外軌道檢測技術發展較為成熟的還僅僅在對軌道幾何尺寸的測量和軌道動力學性能的檢測,而對軌道結構病害檢測還沒有能應用于生產實際的成熟技術。在高鐵大規模建設和開通運營的條件下,工務部門亟需采用車載動態非接觸方式對軌道結構病害進行檢測,本系統就是在這一環境下應運而生的。
1 系統研究的主要內容
車載智能軌道巡檢系統是一套集高速數字圖像采集、大容量圖像數據實時處理和存儲、定位技術、智能化和信息化、自動控制于一體的智能系統,能對可視性軌道結構狀態進行動態檢測。系統分為實時采集和后期分析處理兩大部分。
1.1 圖像的實時采集和存儲
系統通過布置于車底的高速相機陣列,拍攝列車通過高鐵線路的整個車底下道床圖像,存儲于計算機。通過車載系統提供的里程定位信息、車輛速度信息、車輛編碼器信息、列車行進方向、上下行等信息,拍攝列車經過線路的軌道圖像,包含軌道板裂紋、扣件的缺失甚至松動、鋼軌表面的光帶、鋼軌的擦傷、剝落掉塊等所有可視缺陷,經數字化處理后顯示于監視器上,最終實現對列車經過的整條線路的檢測。
1.2 圖像的后期分析和處理
圖像采集回來以后,工作人員在辦公室對采集的圖像通過人機結合的方式進行分析處理。先由自動識別軟件對選定的目標圖像文件夾進行智能圖像分析與缺陷識別,識別出來的缺陷圖像將自動放入缺陷庫(目前能夠自動識別的缺陷主要包括扣件的異常、鋼軌的擦傷和剝落掉塊、光帶的分布不勻等)。然后通過人工輔助分析,判斷哪些是現場真實缺陷,哪些是由于線路的油漆痕跡和扣件內的污物等造成的誤判,剔除不構成行車安全的缺陷圖片,剩下的即是有效的缺陷圖片。通過人工回放軟件對目前暫時未能實現自動識別的軌道板裂紋、道床的翻漿冒泥等軌道結構病害進行人工預覽判斷,從而實現了軌道面全覆蓋的可視化巡檢,為線路的養護維修提供了科學的依據。
2 圖像的采集系統
2.1 系統的組成
高速相機和LED光源安裝于列車底部,測速觸發裝置向兩個相機發出行觸發信號,相機接到觸發信號后采集圖像,并將圖像傳回給采集存儲系統,由采集存儲系統負責將圖像進行壓縮和存儲。如圖1所示。
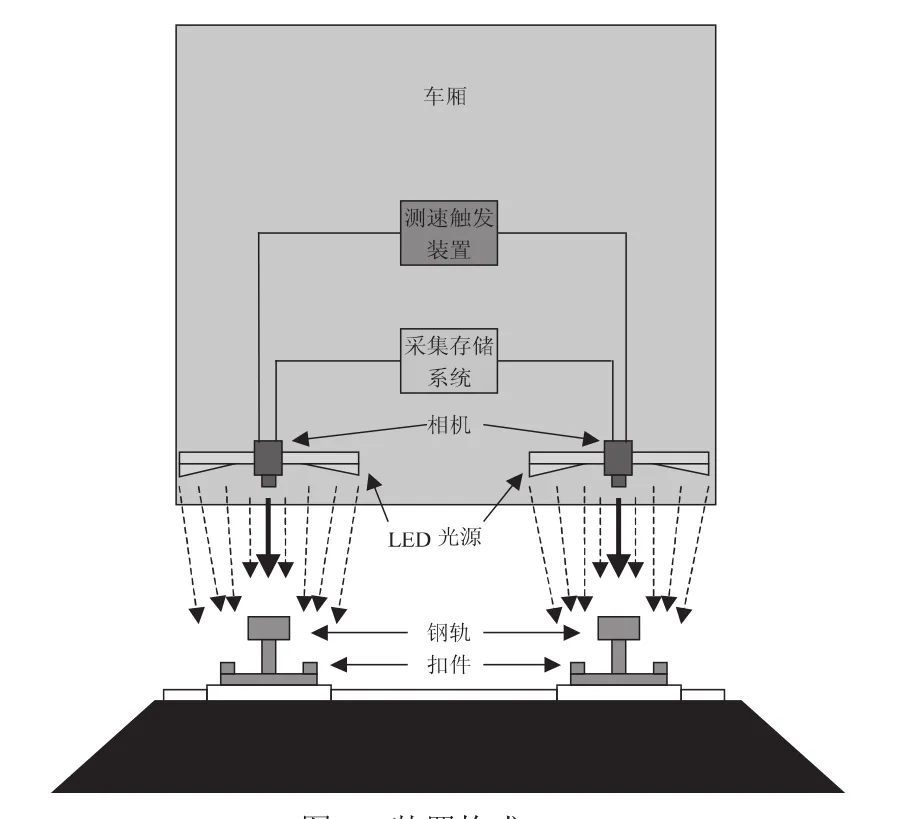
圖1 裝置構成
系統使用兩臺相同型號的線陣列相機,通過外出發模式來進行相機的采集控制。相機的分辨率為2k,單個相機視場大小1600mm,工作距離800mm,通過選擇適當焦距的鏡頭,可拍攝物體景深250mm左右。每個相機的視場大小雖然只有1600mm,但兩個相機拼在一起的視場超過了2800mm,滿足了覆蓋整個軌道板面的要求(如圖2所示)。對于采集圖像的重疊部分,將在回放時由回放軟件裁剪掉。
相機長時間不間斷采集軌道圖像,最高時的頻率可達18kHz,在行車速度60km/h的情況下,保證了1mm/線的高精度圖像采集。同時,在行車方向上,圖像可以連續地進行無縫拼接。
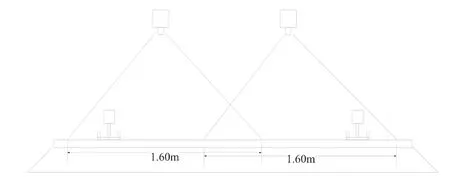
圖2 兩個相機協同工作原理
光源選擇定制型高亮度條形LED。中心的LED對著鐵軌,亮度較低;兩邊LED對著扣件以及軌道板,亮度稍高。由于鐵軌比扣件距離相機和光源更近,所以光源亮度做了調整,使得拍攝出的圖像亮度更為均勻。
2.2 圖像的采集流程
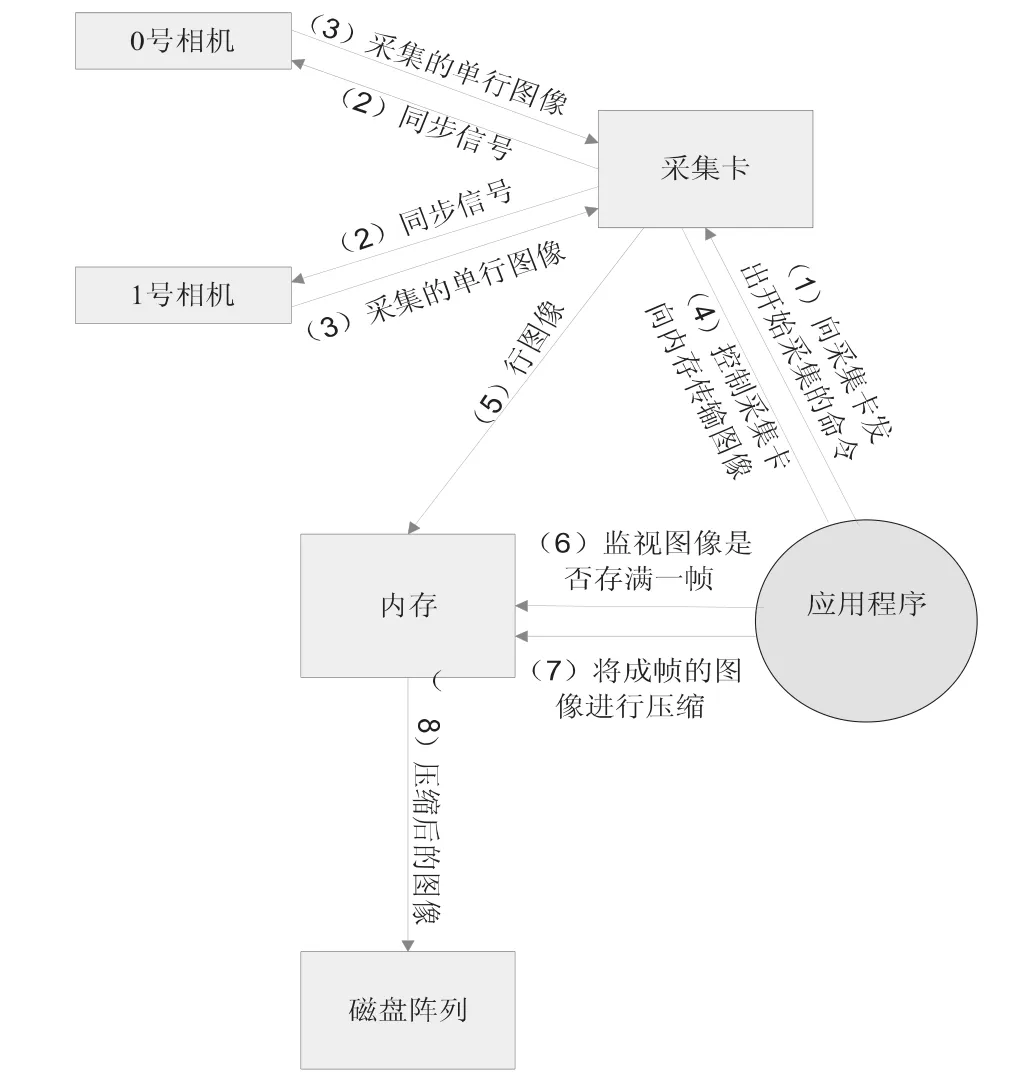
圖3 系統工作流程
由行同步編碼器發出同步信號觸發兩臺相機采集圖像,相機接收觸發信號,逐行拍攝,并將拍攝的圖像傳遞給采集卡,通過采集卡的整合發送給采集應用程序。應用程序對采集的圖像進行相應的壓縮后將圖像保存到磁盤陣列存儲器中。磁盤陣列在多個磁盤上同時存儲和讀取數據,保證了大容量圖像數據的高速存儲。整個工作流程如圖3所示。采集界面如圖4所示。
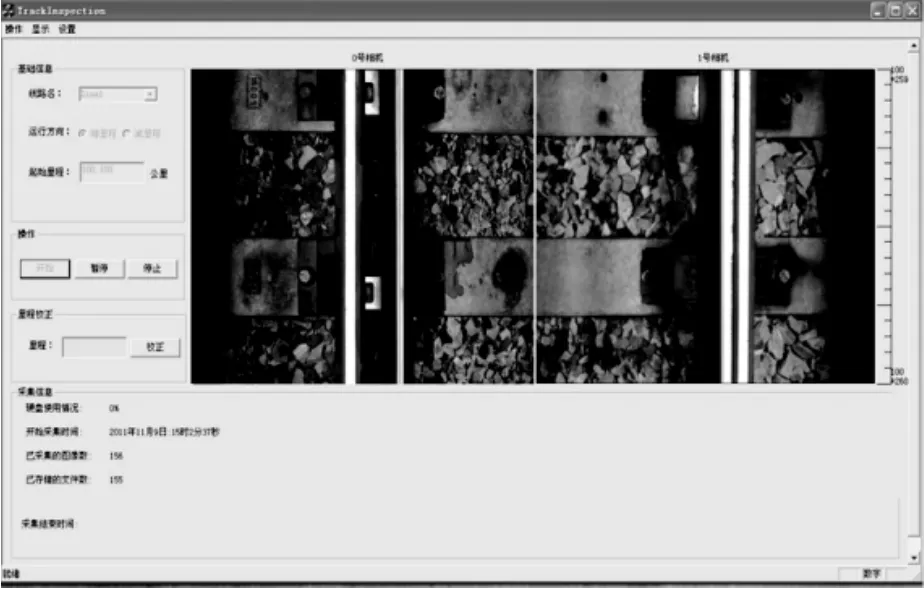
圖4 采集界面
3 圖像人工回放系統
每次采集的圖像和相關的里程信息、線路信息和其它配置信息等統一按照規則存儲到圖像采集任務包中。回放軟件以任務包為單位對采集的圖像進行顯示,回放人員可以用矩形框標注出所查看到的缺陷,并通過點擊下一幅按鈕來遍歷每一幅圖。遍歷的過程中可以任意縮放圖像,查看之前標注的缺陷,也可以設置時間自動播放。每一幅圖像都有相應的里程信息,回放時可以隨時通過里程定位查找到相應位置的圖像。人工標注好缺陷以后,軟件可以按要求查詢出缺陷圖像及缺陷信息,并可自動生成圖文報表,幫助進行巡檢。
4 智能識別系統
智能識別系統遍歷每一幅圖像,靠軟件自動識別出相關缺陷,目前本系統主要完成了鋼軌光帶異常的自動識別和扣件歪斜、缺失等問題的自動識別。
4.1 鋼軌光帶異常的識別
鋼軌光帶異常的智能識別主要包括鋼軌擦傷、點蝕、腐蝕等缺陷的識別。智能識別系統根據預處理后的圖像的灰度變化,利用水平投影和垂直投影的平滑性改變來檢測缺陷,正常情況下的投影曲線應是平滑的,如出現波動,則說明光帶有缺陷。圖像預處理的主要目的是消除圖像中無關的信息,恢復有用的真實信息,增強有關信息的可檢測性和最大限度地簡化數據,從而改進特征抽取、圖像分割、匹配和識別的可靠性。本系統的預處理過程包括平滑、增強等步驟。而投影是為了有效的提取圖像的特征信息。本系統首先對輸入圖像進行縱向投影,剪切出光帶及其周邊部分區域。因為光帶的灰度值最大,所以縱向投影后對索引矩陣排序后找到最大值就可以找到光帶具體位置,再外擴若干像素便可剪切出光帶子圖。再對這個光帶子圖進行橫向投影,如果光帶存在異常,則其橫向投影就會出現灰度值陡變的情況,如圖5所示。
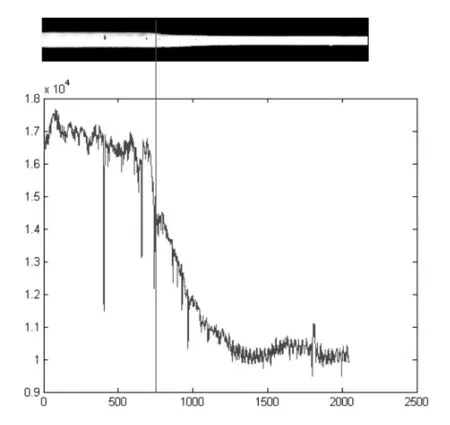
圖5 存在異常的光帶子圖的橫向投影效果
4.2 扣件歪斜與缺失的識別
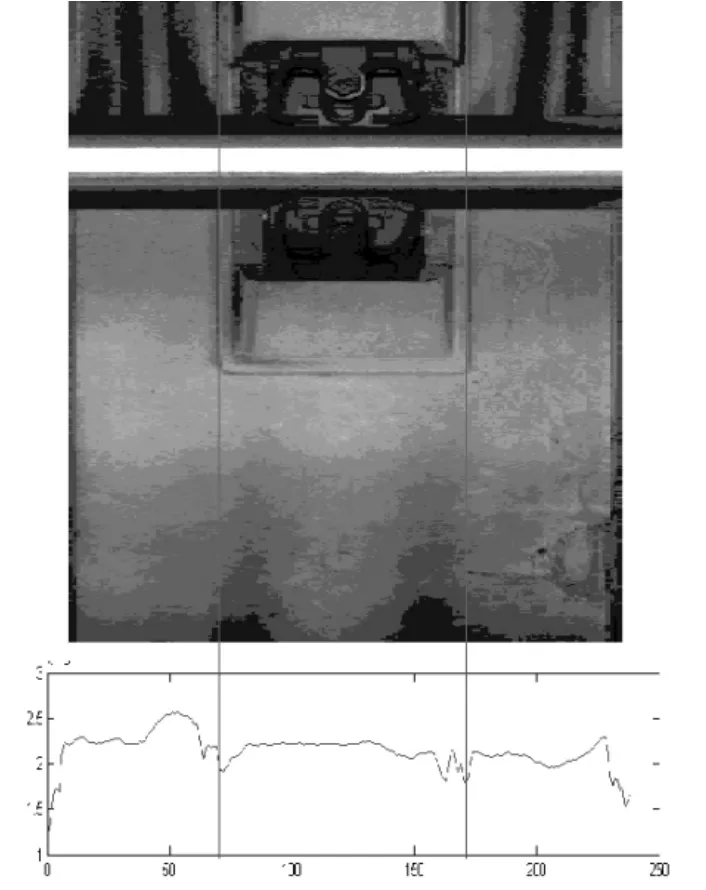
圖6 剪切出軌道板子圖
智能識別軟件根據鋼軌的位置從圖中分割出扣件區域圖,將扣件區域圖與模板圖像進行比對,從而判斷扣件是否存在歪斜與缺失。從整個圖像中分割出扣件區域圖是非常關鍵的一部。本系統采用灰度閾值分割法,在確定合適的閾值后,將閾值與像素點的灰度值進行比較和分割,檢測灰度級或者結構具有突變的地方,這些地方往往表明一個區域的終結和另一個區域的開始。整個像素比較的過程可以并行進行,分割的結果直接給出扣件區域。區域分割通過兩個步驟進行,第一步是通過橫向投影,剪切出扣件所在區域的軌道板子圖。如圖6所示。
再進行縱向投影剪切出扣件區域子圖。如圖7所示。對于扣件區域子圖,與模板圖像進行比對,可檢測出扣件歪斜與缺失的圖像。
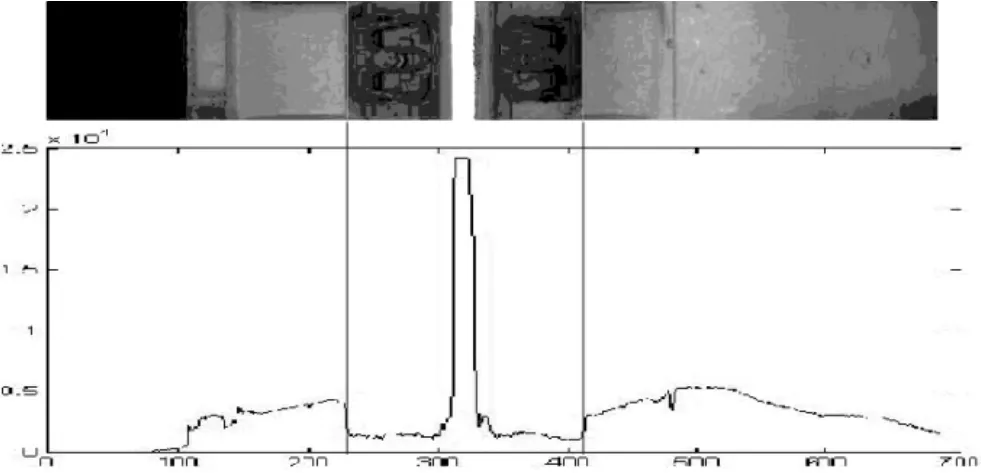
圖7 剪切出扣件區域子圖
5 結論
智能軌道檢測系統采用了先進的機器視覺技術,系統的開發思路及技術手段體現出了有效、易用、安全、經濟的顯著特色。該系統的研制成功,提高了軌道巡檢和地面檢測數據分析處理的能力。通過數據采集系統和分析系統,合理配置人工資源,能夠實現把檢測到的缺陷數據及時提供給相應的工務段,進一步提高了對現場指導的準確性和實用性。該系統現在正在投入使用,基本滿足需求,但還可以通過增加相機進一步改善拍攝效果,同時通過后續的研究,智能識別的缺陷類型也在不斷的增多。相信系統的不斷改進將為鐵路的安全運營帶來更好的保障。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46