動力定位系統推力分配算法研究
2013-06-12 06:54:04張法富劉鴻雁
船海工程 2013年2期
張法富,劉 波,劉鴻雁,楊 輝,周 楠
(海洋石油工程股份有限公司設計公司,天津300451)
在動力定位(DP)船初步設計階段,合理的推力分配邏輯直接或間接影響推進器選型、布置,從而對主機選型也產生影響[1-2]。本文針對初步設計階段的特點,對DP系統推力分配計算方法進行研究,選取合適的目標函數,解決推力分配最優化問題,實現目標船對經濟性、可靠性和操縱性的要求。
1 數學模型的建立
1.1 推力分配的概念
推力分配邏輯,見圖1,處于動力定位控制系統終端,接受控制中心指令做為該邏輯的初值,包括系統所需的水平力和艏搖力矩。在求解最優化數學模型后得出推進器轉速和方位角,以有效地維持系統的定位能力,并保證系統的經濟性、可靠性及可控性等問題[3]。
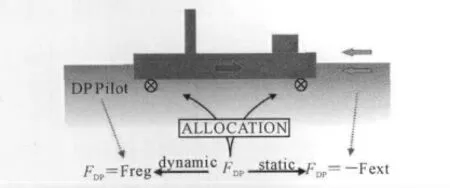
圖1 推力分配邏輯示意
1.2 目標函數的選取
鑒于深海開發和抵抗惡劣海洋環境條件的需求,目前新建半潛平臺、工程船等大多采用高級別的DP系統。其所用推進器的數目遠遠超出傳統船舶推進器的數目。以“海洋石油278”為例,其推進系統由2臺帶舵主推進器、3臺管道推進器及2臺全回轉推進器構成。推進器數目的增多,使得僅依靠橫蕩、縱蕩和艏搖3個自由度力及力矩的平衡方程,無法給出準確的推力分配方案。推力分配問題轉化為多變量優化問題。
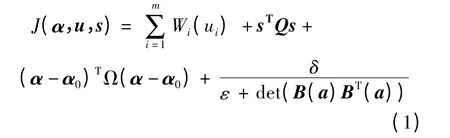
學術界和工程界給出的目標函數主要針對最小功率消耗、避免系統的奇異性、推進器磨損最小、推進器與船體之間及推進器之間水動力干擾最小等方面。文獻[4]提出的推力分配優化目標為
其約束條件為
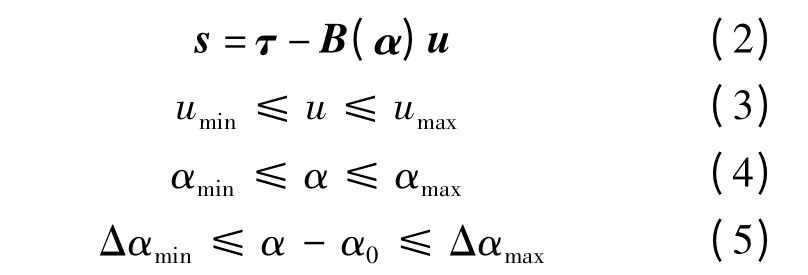
在式(1)中,第1項針對推進系統功率消耗;第2項為懲罰項,保證推力誤差s≈0;第3項針對推進器磨損,約束方位角的變化速率,通過式(5)進行約束;第4項用于避免系統奇異結構的發生,式(3)、(4)對推進器推力范圍及禁止角進行約束。
目前,國內的研究大多從式(1)出發,對推力分配方案進行優化。在船舶初始設計階段,針對設計周期短、需要快速給出推進器選型、布置等特點,選擇一套簡單便捷的推力分配方法是必要的。從環保、節能以及船舶經濟性考慮,降低能耗成為首選的優化目標。本文從節能的角度出發,選取低能耗為優化目標。基于最小功率消耗的推力分配邏輯首先需要確定總功率P與推力T之間的關系。
根據文獻[5]的推導得出推力Ti與功率Pi之間的關系為

式中:kq(0)——無因次轉矩系數;
kt(0)——無因次推力系數。
文獻[5]假設了兩個完全相同的推進器組成推進系統,對于多個相同的推進器構成的推進系統,各推進器推力與總推力方向相同,且每個推進器輸出推力大小相等的時候,推力系統消耗的功率最小。不過這種情況僅在沒有艏搖力矩下才成立。在實際應用的動力定位中,由于艏搖力矩的存在,推力分配問題是一個多約束的優化問題。
1.3 簡化數學模型
根據1.2分析,推力分配是一個多變量有約束的最優化問題。可用優化方法將推力分配問題轉化為包括目標函數、等式約束和不等式約束的約束優化數學模型,然后利用優化算法對其進行求解。
在幾種類型的推進器中,只有全回轉推進器在任何方向都能產生推力,管道式推進器只能在固定方向產生推力,主推進器只能在前進和倒車方向產生推力。考慮管道式推進器與主推進器推力輸出方向固定,將推進器在縱向(X軸)與橫向(Y軸)的分量做為變量,于是有

式中:N——推進器數目。
推進器工作時產生的推力方位角αi為

式中:x2i-1——推進器的縱向推力;
x2i——推力器的橫向推力。
以最小的功率消耗為目標,根據式(6)功率與推力之間的關系,目標函數可簡化為

根據推力范圍及推進器禁止角等條件,可以獲得三組約束條件。第一組為等式約束,要求推進器產生的推力(矩)要與控制器計算得到的推力指令和力矩指令相等。
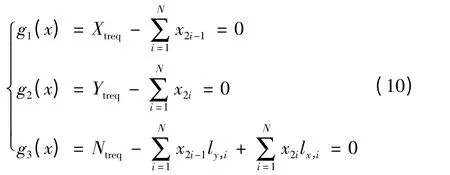
式中:Xtreq,Ytreq,Ntreq——控制器發出的X、Y方向的推力指令和力矩指令;
lyi,lxi——推力器到目標船旋轉中心(一般取坐標原點)的縱向和橫向距離。
第二組為不等式約束,源于推進器最大推力限制。

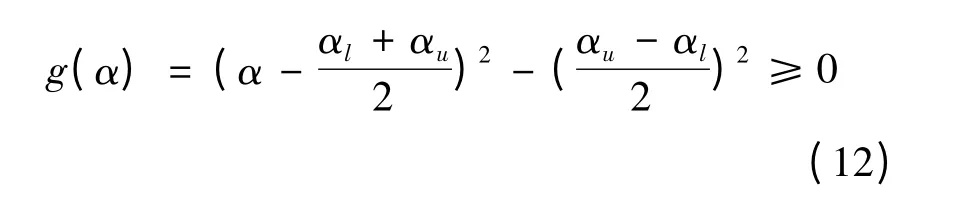
第三組不等式約束主要對禁止角做約束處理。禁止角是對全回轉推進器設定的,主要用來降低推進器之間的相互干擾。禁止角在設置時要求指定角度區域的下限(αl,i)和上限(αu,i),從而不等式約束可寫成
建立推力分配的數學模型后,就可以通過優化算法對其進行求解。
2 優化算法的選取
針對推力分配問題,國外主要提出以下方法:序列二次規劃法、線性規劃方法、推進器分組法、奇異值分解和濾波法以及阻尼最小方差法[6-10]。國內對推力分配問題的研究,主要集中在高校,如上海交通大學、哈爾濱工程大學和大連理工大學等,基本上為國外算法的繼承和進一步優化。
根據1.3中描述,推力分配問題轉化為多變量有約束的非線性優化問題。解決非線性最優化問題的方法有偽逆算法、遺傳算法、序列二次規劃法(SQP)等。
通過分析非線性問題的各類算法的優缺點,針對簡化的推力分配數學模型,本文選取序列二次規劃法進行優化計算。
序列二次規劃法是求解約束優化問題最有效的算法之一,一般用來求解以下非線性優化問題。
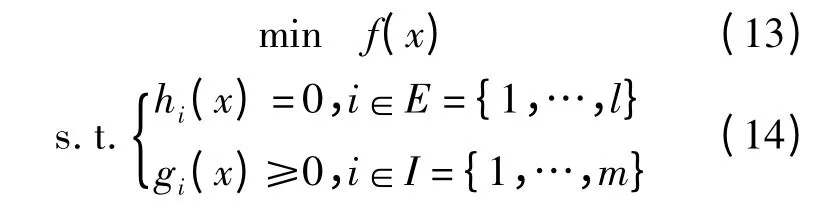
其基本思想是:在每一迭代步通過求解一個二次規劃子問題來確立一個下降方向,以減少價值函數來取得步長,重復這些步驟直到求得原問題的解。
本文對二次規劃子問題的Hesse矩陣的處理方法基于Powell修正的BFGS公式。
3 實例計算
針對目前深海作業工程船大多采用DP系統的趨勢,本文選取某半潛式自航工程船做為目標船,運用序列二次規劃法對其進行推力分配計算。
3.1 推進器基本參數
目標船推進器布置見圖2。
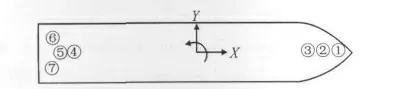
圖2 目標船推進器布置
采用右手系坐標系,原點位于船舯與基線的交點,X軸平行船體基線指向船艏,Y軸位于船舯指向左舷,Z軸豎直向上。推進器方位角是指推進器與X軸逆時針方向的夾角。
推進器相關參數見表1。
3.2 推進器相互干擾的處理
推進器之間的相互干擾,會造成推進器的推力減額。從而造成指令推力和實際獲得推力之間出現誤差,影響定位精度。根據表1中推進器參數,2#、3#推進器為全回轉推進器,當2#、3#推進器螺旋槳位于同一軸線時,就會產生嚴重的干擾問題。目前,比較慣用的做法是對全回轉推進器設置一定角度范圍作為禁止工作區域,從而避免大幅度的推力損失。即為禁止角的由來。文獻[11]總結了推力減額的經驗公式。
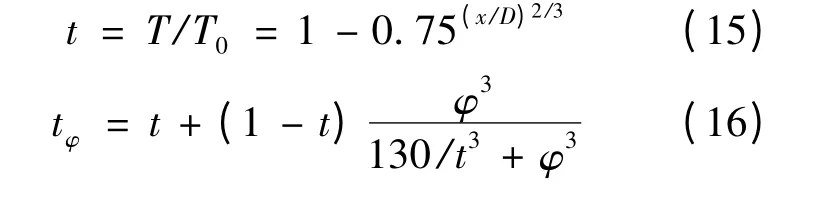
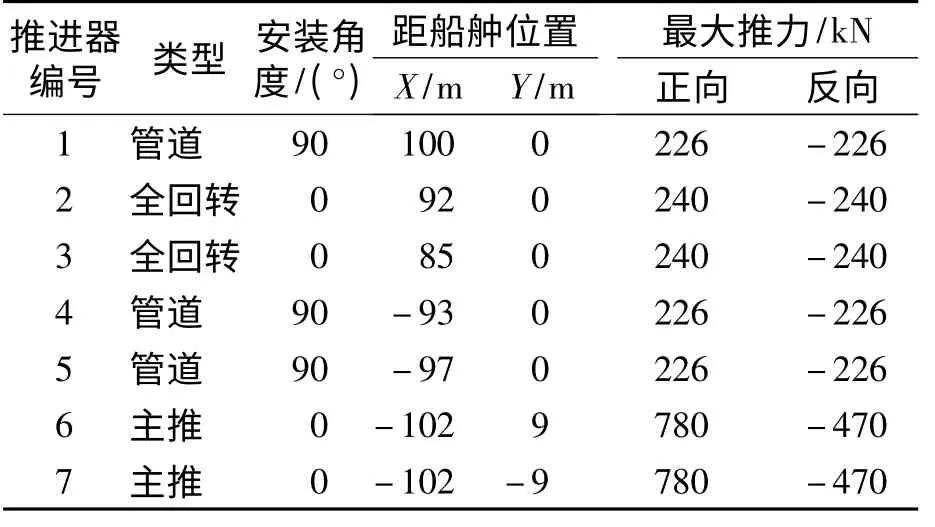
表1 推進器基本參數
式中:t——推力利用率;
T——下游推進器推力;
T0——敞水時的系柱推力;
x——兩個推進器之間的距離;
D——推進器直徑;
φ——推進器螺旋槳軸線的夾角,(°);
tφ——夾角為φ時下游推進器的推力利用率。
根據經驗公式及文獻[12]的試驗結果,當前后兩個推進器螺旋槳軸線夾角大于30°時,由推進器之間相互干擾導致的推力損失已經很小。由于管道推進器與主推進器的方位角已經確定,根據目標船推進器的布置特點,此處只需設定2#全回轉推進器的禁止角為330°~30°,3#全回轉推進器的禁止角為150°~210°。
3.3 SQP數值計算
根據式(9)~(11)及表1中推進器基本參數,目標船的推力分配轉化為優化問題如下。
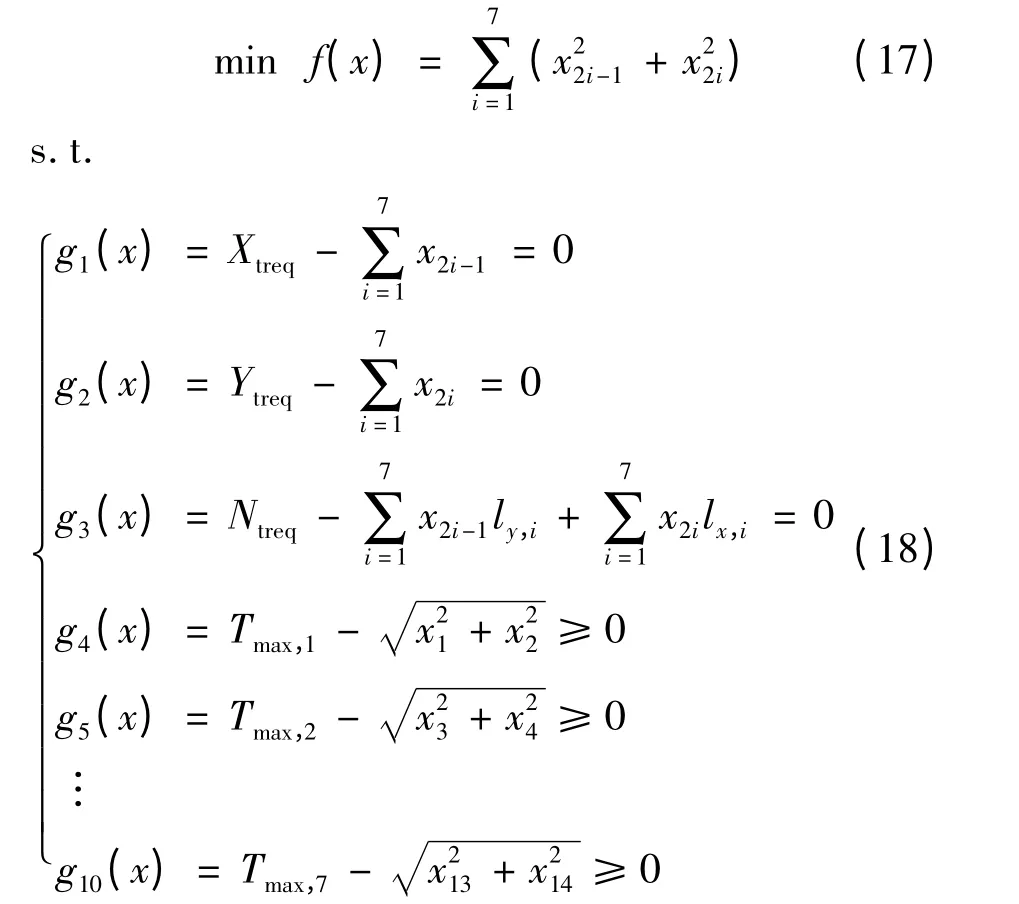
2#、3#全回轉推進器的禁止角3.2中已經給出,通過式(8)及式(12)進行約束。根據表1中推進器安裝角度,可以得知1#、4#和5#推進器在X方向無推力產生,6#、7#推進器在Y向無推力產生,則優化問題進一步簡化。程序中采用一個14X1的數組輸出推進器推力。
將指令推力Xtreq、Ytreq、Ntreq(即環境力/力矩)作為輸入條件,輸出推進器在X軸與Y軸的推力分量。下面以目標船在標準北海環境條件[18]下所遭受的環境力為例,給出目標船在0°,90°環境力方向的推力分配結果。見表2、表3。
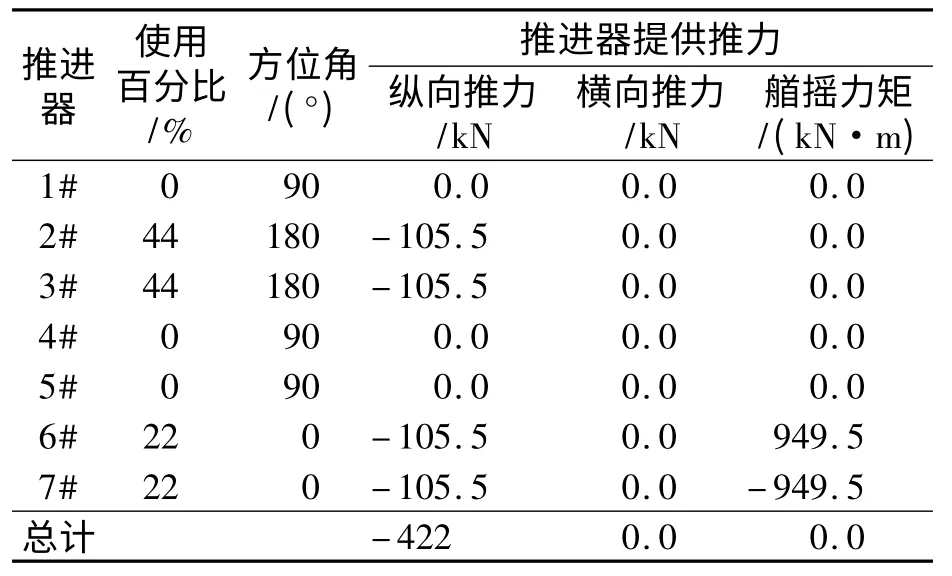
表2 0°方向環境力的推力分配結果
由表2、表3可見,采用序列二次規劃法能夠快速給出以最小功率消耗為目標的推力分配方案。能夠為設計初期推進系統設計提供依據,方法是可行的。
從表2看出,設定的禁止角未能很好地約束全回轉推進器的方位角,這是由于序列二次算法的局限性引起的。由于禁止角問題不能很好地解決,可以給推進器設定一定的推力冗余。
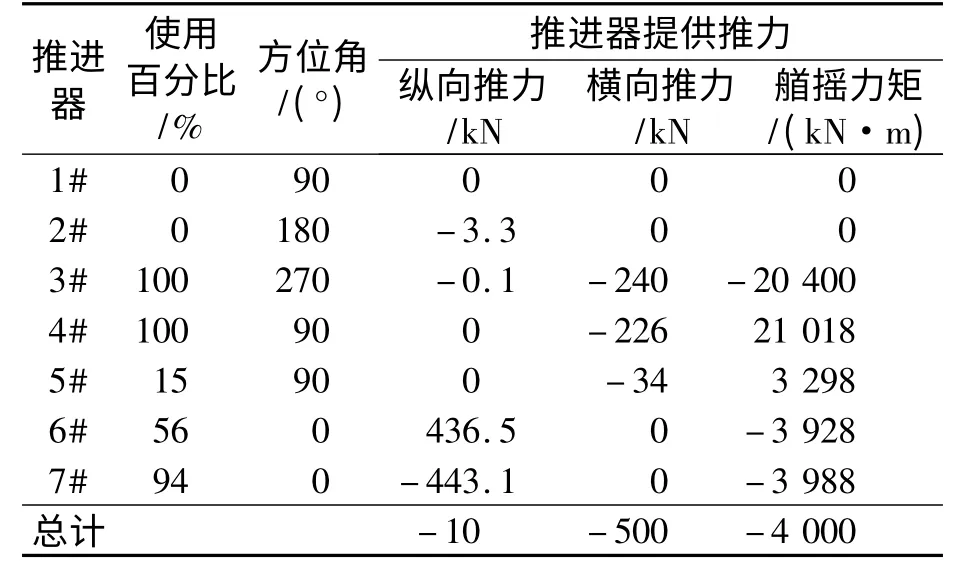
表3 90°方向環境力的推力分配結果
4 結論
1)利用序列二次規劃方法對推力分配進行計算,能夠快速地解決以最低能耗消耗為目標函數的推力分配問題。雖然對目標函數進行了簡化處理,算法較為粗略,但能快速地為設計初期的推進器選型、布置提供理論依據,同時也能對推進器設計方案進行初步評估。
2)實例計算中忽略了舵的作用,如何在數學模型中將舵的作用考慮進去,有待進一步研究。
3)序列二次規劃法對于初值的依賴性很強,全局收斂性較差,對于復雜推力分配問題,其算法還需進一步完善。
[1]International Maritime Organt Sation MSC/Circ.645.Guidelines for vessels with dynamic positioning systems[S].1994.
[2]GOLDING B K.Industrial Systems for Guidance and Control of Marine Surface Vessels[M].NTNU,Norway,2004.
[3]楊世知.DP推進系統水動力干擾及最優推力分配算法研究[D].上海:上海交通大學,2010.
[4]JOHANSEN T A,FOSSEN T I,BERGE SP.Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming[J].IEEE Transactions on Control Systems Technology.2004,12(1):211-216.
[5]WEBSTER W C,SOUSA J.Optimum allocation for multiple thrusters[C]∥International Society of Offshore and Polar Engineers Conference(ISOPE-99),Brest,France,1999.
[6]WICHERSJ,BULTEMA S,MATTEN R.Hydrodynamic research on and optimizing dynamic positioning system of a deep water drilling vessel[C]∥Offshore Technology Conference,Houston,Texas,1998.
[7]BERGE SP,FOSSEN T I.Robust control allocation of overactuated ships:experiments with a model ship[C]∥Proc.of the 4thIFACConference on Maneuvering and Control of Marine Craft,Brijuni,Croatia,1997.
[8]YANG Shizhi,WANG Lei,ZHANG Shen.Optimal thrust allocation based on fuel-efficiency for dynamic positioning system[J].Journal of Ship Mechanics,2011,15(3):217-226.
[9]吳顯法,王言英.動力定位系統的推力分配策略研究[J].船海工程,2008,37(3):92-96.
[10]張文霞.船舶動力定位系統控位能力計算算法研究與實現[D].哈爾濱:哈爾濱工程大學,2008.
[11]JIE Dang,HANSLaheij.Hydrodynamic aspects of steerable thrusters[C]∥Marine Technology Society,Dynamic Positioning Conference,Houston,2004.
[12]NIENHUISU.Analysis of thruster effectivity for dynamic positioning and low speed maneuvering[D].Delft,the Netherlands:Technical University Delft,1992.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18