一種改進(jìn)的噪聲門限檢測(cè)方法
2013-06-05 13:30:00黃金杰
火控雷達(dá)技術(shù) 2013年1期
關(guān)鍵詞:檢測(cè)
任 倫 黃金杰 井 偉
(西安電子工程研究所 西安 710100)
1 引言
雷達(dá)回波信號(hào)中,既可能有目標(biāo)回波信號(hào),也存在噪聲和雜波等干擾信號(hào),所以雷達(dá)目標(biāo)回波信號(hào)的檢測(cè)是在噪聲和雜波干擾背景下的二元信號(hào)最佳檢測(cè)問題[1]。其中接收機(jī)噪聲主要來源分為內(nèi)部噪聲和外部噪聲[2],一般變化比較緩慢,且分布在雷達(dá)的整個(gè)作用范圍內(nèi)。目前雷達(dá)目標(biāo)檢測(cè)主要采用門限檢測(cè)方法,在只有噪聲干擾下的信號(hào)檢測(cè)稱之為噪聲門限檢測(cè)[1],噪聲門限檢測(cè)技術(shù)在整個(gè)雷達(dá)信號(hào)處理技術(shù)中相對(duì)比較簡(jiǎn)單,但其效果將關(guān)系到最終的信號(hào)檢測(cè)性能,所以仍是一個(gè)非常重要的問題。通常噪聲門限檢測(cè)采用奈曼-皮爾遜(Neymun-Person)準(zhǔn)則[1],即在雷達(dá)目標(biāo)回波信號(hào)檢測(cè)中,要求在一定的虛警概率條件下,檢測(cè)概率達(dá)到最大。
雷達(dá)檢測(cè)中,過高的虛警會(huì)大量占用雷達(dá)資源,甚至導(dǎo)致雷達(dá)無法正常工作,所以降低虛警概率顯得尤為重要。對(duì)于同一目標(biāo),接收機(jī)信噪比與距離的四次方成反比,隨著距離的由遠(yuǎn)及近,信噪比逐漸變大,近距離的目標(biāo)回波強(qiáng)度非常大。為此本文提出了一種改進(jìn)的噪聲門限檢測(cè)方法,根據(jù)信噪比隨距離的變化,設(shè)計(jì)隨距離變化的檢測(cè)門限系數(shù),兼顧了噪聲隨時(shí)間的變化和接收機(jī)信噪比隨距離的變化。此外,對(duì)于此方法的工程應(yīng)用,本文也提出了簡(jiǎn)單設(shè)想,可實(shí)現(xiàn)整個(gè)檢測(cè)范圍內(nèi)平均虛警概率的降低或者提高雷達(dá)遠(yuǎn)程探測(cè)能力。
2 方法原理
2.1 噪聲門限檢測(cè)基本原理
噪聲環(huán)境中信號(hào)的自動(dòng)門限檢測(cè),關(guān)鍵是自動(dòng)形成與噪聲干擾環(huán)境相匹配的自動(dòng)門限檢測(cè)電平,其原理框圖[1]如圖1所示。
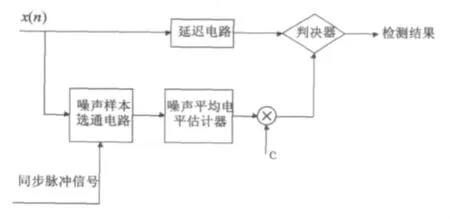
圖1 自動(dòng)門限檢測(cè)原理框圖
圖1中,噪聲樣本選通電路保證了用于噪聲平均電平估計(jì)的樣本數(shù)據(jù)是選自噪聲區(qū)的采樣,消除了目標(biāo)回波信號(hào)、雜波干擾信號(hào)等對(duì)噪聲平均電平估計(jì)的影響。通過噪聲平均電平估計(jì)器對(duì)x(n)求均值,得到噪聲的平均電平估計(jì)值,只要選擇的樣本數(shù)足夠多,估計(jì)值的均方誤差就足夠小,估計(jì)值就非常接近噪聲平均值。噪聲電平的均值乘以系數(shù)c,所形成的檢測(cè)門限電平隨噪聲強(qiáng)度的變化而變化,從而實(shí)現(xiàn)噪聲環(huán)境中信號(hào)的恒虛警率檢測(cè)。
一般情況下,噪聲包絡(luò)的概率密度函數(shù)服從瑞利分布,即
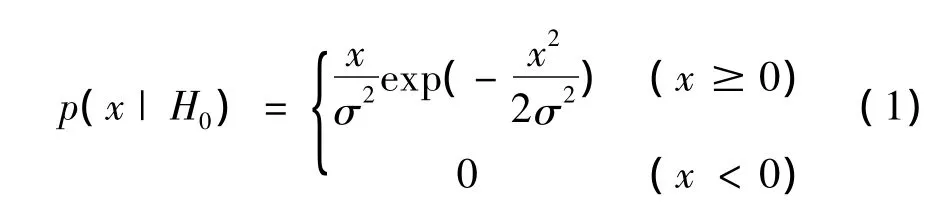
式中,σ為噪聲的標(biāo)準(zhǔn)差;H0表示沒有目標(biāo)存在。單次檢測(cè)的虛警概率為:

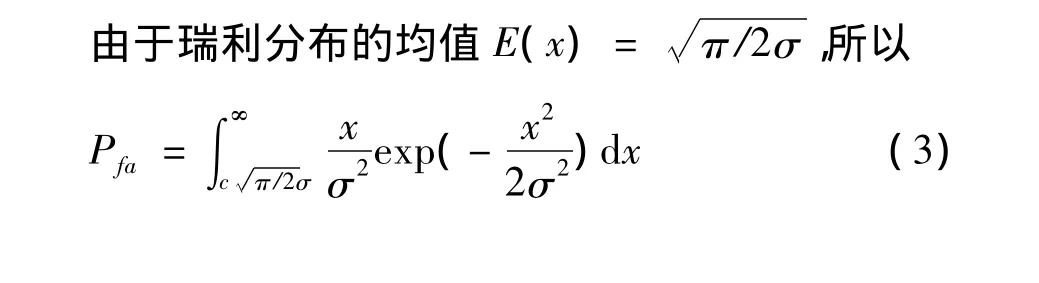
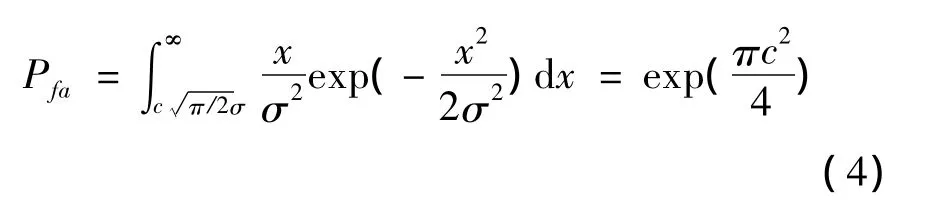
由(4)式可知,虛警概率只與門限系數(shù)c有關(guān),所以可以通過調(diào)節(jié)門限系數(shù)c來達(dá)到理想的虛警概率。
2.2 改進(jìn)的噪聲門限檢測(cè)原理
[3]可知,對(duì)于同一目標(biāo),接收機(jī)接收到的回波信噪比與距離的四次方成反比,即

m為一定值;r為檢測(cè)單元的距離。雷達(dá)在噪聲環(huán)境下的檢測(cè)概率

式中,I0(·)表示修正的零階貝塞爾函數(shù);A是目標(biāo)回波幅度。檢測(cè)概率的計(jì)算比較復(fù)雜,一般采用近似計(jì)算,North提出了一種非常精確的近似[3]:

假設(shè)最遠(yuǎn)端的虛警概率為P;信噪比為M,則為了保證每個(gè)檢測(cè)單元檢測(cè)概率相同,即:
K為固定值。則虛警概率隨距離變化的關(guān)系:

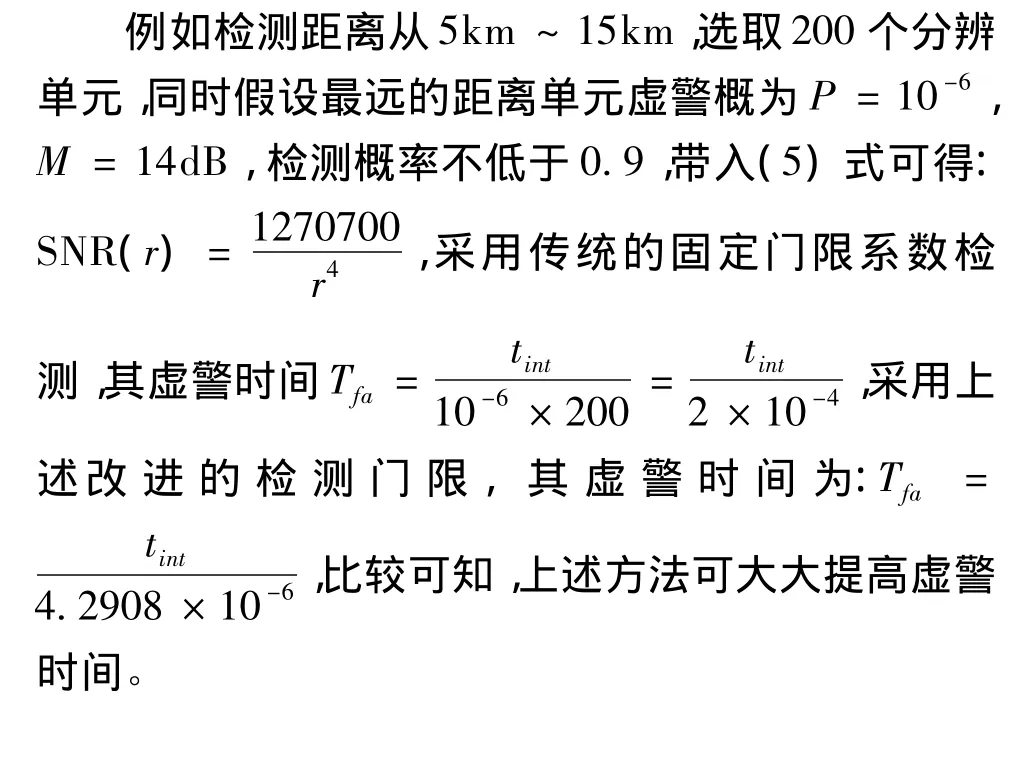
由最遠(yuǎn)檢測(cè)單元的距離、所要達(dá)到的檢測(cè)概率和虛警概率,可以求出(5)式中的m值,將(5)式帶入公式(9)中,即可求得不同距離上對(duì)應(yīng)的虛警概率,由于虛警概率與檢測(cè)概率的變化趨勢(shì)是相同的,即虛警概率變大時(shí)檢測(cè)概率也會(huì)隨之變大,反之亦然。所以只要保證不同檢測(cè)單元的虛警概率不低于公式(9)給出的臨界值,就可以保證每個(gè)檢測(cè)單元上的檢測(cè)概率不低于設(shè)計(jì)要求的值。
另由(4)式可知:
將(9)式計(jì)算得到的虛警概率帶入(10)式便可求出不同距離單元對(duì)應(yīng)的檢測(cè)門限系數(shù),用此門限系數(shù)進(jìn)行噪聲門限檢測(cè),便可在保證一定檢測(cè)概率的情況下盡可能的降低虛警。
2.3 計(jì)算虛警時(shí)間
虛警時(shí)間[3]是指兩次虛警之間的平均時(shí)間,虛警時(shí)間越高,對(duì)應(yīng)的虛警概率越小,對(duì)雷達(dá)操作員來說,虛警時(shí)間比虛警概率更有意義,虛警時(shí)間的計(jì)算公式:

其中Tfa為虛警時(shí)間,tint為一個(gè)脈沖重復(fù)時(shí)間(PRI),N為檢測(cè)單元數(shù)目。
采用非線性的門限系數(shù)之后,每個(gè)檢測(cè)單元的虛警概率都不同,所以虛警時(shí)間的計(jì)算公式變?yōu)?
3 工程實(shí)現(xiàn)與計(jì)算機(jī)仿真[4]
圖2是各距離單元虛警概率對(duì)應(yīng)的檢測(cè)門限系數(shù),其中距離選擇在5km~15km,分辨單元為50m,虛警概率不小于10-8,檢測(cè)概率不小于0.9。本文后面的實(shí)驗(yàn)均是在此條件下進(jìn)行。
由圖可看出,虛警概率和門限系數(shù)隨距離變化迅速,在距離小于13km后虛警概率已經(jīng)非常之小,基本不會(huì)出現(xiàn)虛警,此時(shí)如果繼續(xù)增大檢測(cè)門限,對(duì)于降低虛警已無意義,只會(huì)對(duì)檢測(cè)性能帶來?yè)p失。為此實(shí)際應(yīng)用中可將檢測(cè)單元按距離遠(yuǎn)近分為若干段,每段設(shè)置檢測(cè)門限即可。具體應(yīng)用有兩種,一是不改變最遠(yuǎn)距離段的檢測(cè)門限,依次提高近距離段的檢測(cè)門限,最終實(shí)現(xiàn)整個(gè)檢測(cè)范圍的平均虛警概率的降低;二是適當(dāng)降低最遠(yuǎn)距離段的檢測(cè)門限,以此提高雷達(dá)的遠(yuǎn)程探測(cè)能力,同時(shí)提高近距離段的檢測(cè)門限,保證整個(gè)檢測(cè)范圍的平均虛警概率滿足要求。
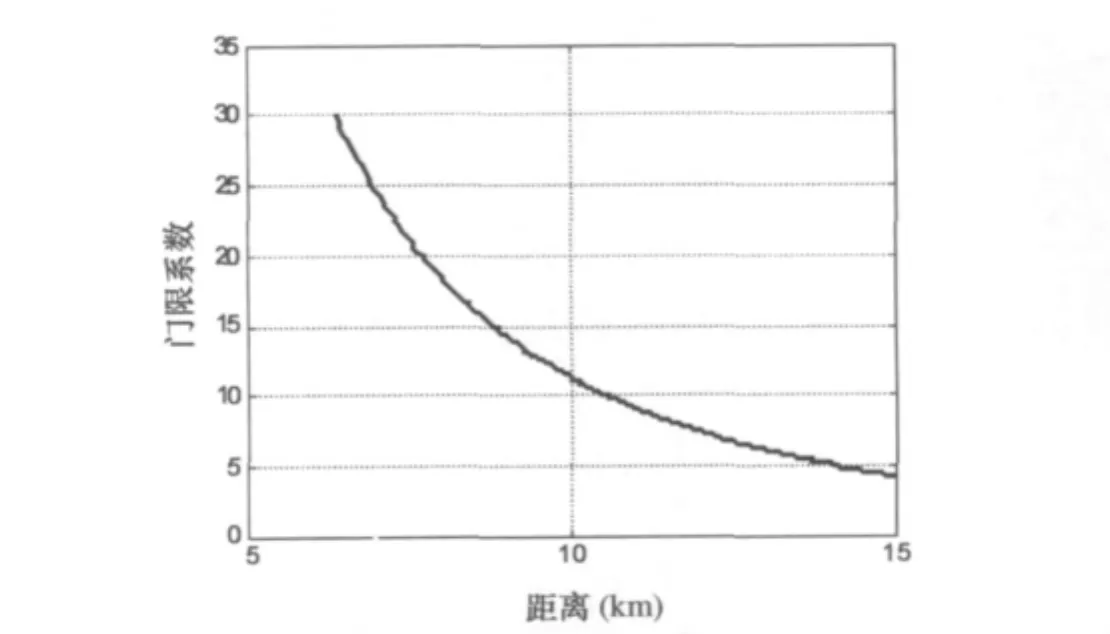
圖2 不同距離下的門限系數(shù)
對(duì)于應(yīng)用一,將檢測(cè)單元按距離分為三段:5~13km,13~14km,14~15km,門限系數(shù)分別為:4.9、4.6、4.2,對(duì)應(yīng)各段的平均虛警概率為 10-8、10-7、10-6,實(shí)驗(yàn)統(tǒng)計(jì)測(cè)得平均虛警概率為10-7。
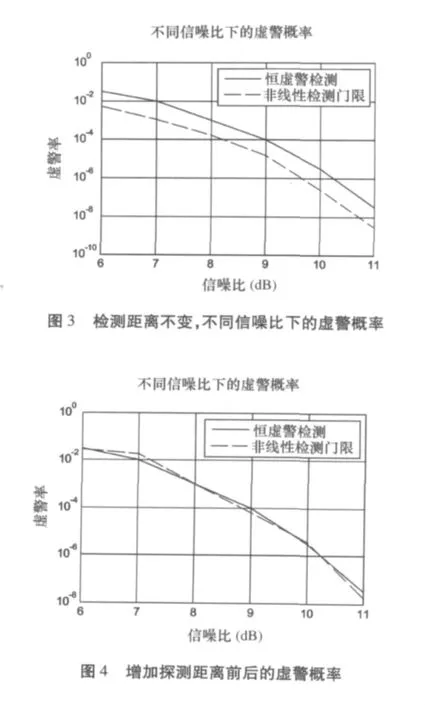
圖3比較了不同信噪比(最遠(yuǎn)端)下,保證最遠(yuǎn)端檢測(cè)概率不低于0.9時(shí),選用恒虛警檢測(cè)和分段檢測(cè)門限所得的實(shí)際虛警概率。由圖可知,在不同的信噪比環(huán)境下,采用分段檢測(cè)門限檢測(cè)方法的虛警概率均比傳統(tǒng)的恒虛警檢測(cè)技術(shù)有大幅降低,約為傳統(tǒng)方法的1/10,說明所提方法對(duì)于噪聲環(huán)境下的目標(biāo)檢測(cè)性能具有很大改善。
對(duì)于應(yīng)用二,不能無限降低檢測(cè)門限以提高探測(cè)距離,因?yàn)檫h(yuǎn)端檢測(cè)門限提高以后,整個(gè)場(chǎng)景下的虛警大部分都來自增加的距離段,檢測(cè)門限降的越低,增加的距離越多,產(chǎn)生的虛警就越多,整個(gè)場(chǎng)景下的平均虛警概率就會(huì)增大。本文通過試驗(yàn)計(jì)算得到虛警概率增大10倍時(shí)探測(cè)距離增加的經(jīng)驗(yàn)公式:

式中R增為探測(cè)距離的增加量;R為原有的最大探測(cè)距離。
下面按上述條件計(jì)算整個(gè)檢測(cè)范圍的平均虛警概率,最大檢測(cè)距離為15km,由式(13)可知,最遠(yuǎn)端虛警概率增大10倍,探測(cè)距離增加1km,5~15km檢測(cè)單元處理方式與應(yīng)用一相同,圖4比較了增加檢測(cè)距離前后、并且分別選用恒虛警檢測(cè)和分段檢測(cè)門限所得的實(shí)際虛警概率。由圖可以看出,增加檢測(cè)距離后,采用分段檢測(cè)門限,虛警概率基本保持不變。
4 結(jié)束語
本文所述方法,充分考慮到雷達(dá)接收機(jī)信噪比隨距離的變化情況,對(duì)于降低整個(gè)檢測(cè)范圍的平均虛警概率或增加雷達(dá)遠(yuǎn)程探測(cè)能力,都有一定效果;同時(shí)本文設(shè)計(jì)的分段門限系數(shù),實(shí)現(xiàn)簡(jiǎn)單,便于工程應(yīng)用。本方法存在以下兩點(diǎn)問題,有待進(jìn)一步研究:首先是按距離進(jìn)行分段分配系數(shù)不一定是最優(yōu)的,工程應(yīng)用中還可進(jìn)一步改進(jìn),本文只是提出了一種思路;其次是對(duì)于雜波干擾,信雜比隨距離變化比較復(fù)雜,雜波干擾環(huán)境下,如何實(shí)現(xiàn)隨距離變化的門限設(shè)置有待研究。
參考文獻(xiàn):
[1]趙樹杰.雷達(dá)信號(hào)處理技術(shù)[M].北京:清華大學(xué)出版社,2010,225 -231.
[2]丁鷺飛,耿富錄,陳建春.雷達(dá)原理(第四版)[M].北京:電子工業(yè)出版社,2009,52-54.
[3]Bassem R.Mahafza,Atef Z.Elsherbeni.MATLAB SimulationsforRadarSystemsDesign[M].北京:電子工業(yè)出版社,2009,10 -11,53-57.
[4]郭愛芳,侯民勝,郭廷鎧.噪聲恒虛警處理電路的計(jì)算機(jī)仿真[J].電子工程師,2007,33(7):4-6.
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
