基于GPS技術的艦載探測系統標校方法研究
2013-06-05 13:29:54朱華邦
火控雷達技術 2013年1期
關鍵詞:設備
杜 娟 朱華邦
(92941部隊 遼寧葫蘆島 125001)
1 引言
目標探測系統精度是導彈武器系統的一項重要指標,對武器系統的命中概率有著重要影響。各種探測系統在裝艦時都進行過統一標校,但是隨著服役時間的增加,探測系統的誤差會發生漂移,這將影響探測系統的系統誤差,因此,武器系統在實際使用和執行重要任務前必須對其探測系統進行標校。
隨著武器裝備的發展,探測系統不斷創新,與之相應的標校工作也不斷發展進步。普遍使用的方法有標校塔標校、有源標校器、光學標校以及海上衛星標校等方法,但操作方便且精度高的方法不多。利用標校塔標校,受到標校塔少、標校距離短等時間和空間的限制[1]。運用有源標校器,雖然已經做到了多波段、頻率可調的一體化標校,但是標校過程中受到地物和海雜波等背景的影響大,嚴重影響標校精度[1~3]。光學標校一般只能進行高精度的方位標校,且需要一定的專業技能。星體標校受衛星時間和距離的影響很大,同時艦姿態誤差也嚴重影響測星標定的結果[4]。
基于上述原因,有必要研究設計新的標校方法以彌補不足。GPS在全球范圍內為用戶提供全天候、連續精確的位置、速度和時間信息,利用其高精度定位技術進行標校,精度高、操作簡單、實時性強、可同時標校多個探測系統、操作人員不受微波輻射,在很大程度上彌補了其它標校方法的不足。
2 標校原理
以GPS高精度定位技術為基礎,將載艦系泊于碼頭,在探測系統和標校目標處分別安裝一套GPS設備,用于測定探測系統與標校目標所在位置的大地坐標,將標校目標的大地坐標轉換至探測系統坐標系下,以此作為目標在探測系統坐標系下的位置真值,與探測系統測得的標校目標位置數據進行比對分析,得出標校誤差。
若對同一載艦上的多個探測系統或多艘艦上的探測系統同時(對同一目標)進行標校,只需在每個探測系統處安裝一套GPS設備,根據各個探測系統的GPS數據分別進行誤差分析即可。標校原理如圖1所示。利用GPS設備進行標校可節約大量時間、兵力,減少人員輻射。
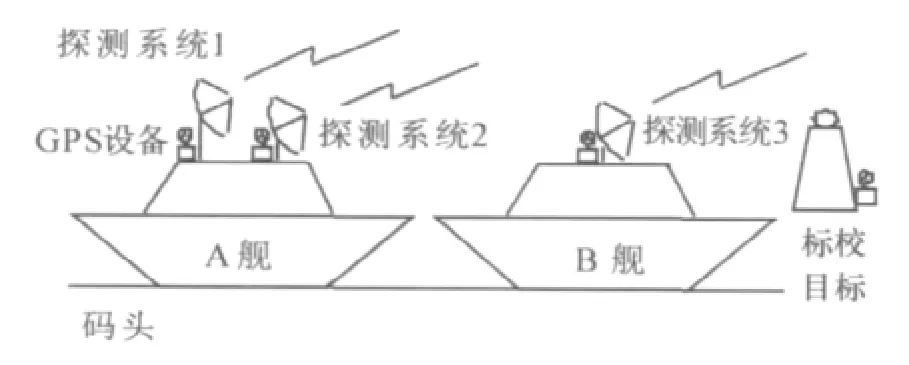
圖1 基于GPS技術的艦載探測系統標校原理圖
3 真值獲取
3.1 同步測量
武器系統的時間信息由艦上時統給出,時統時間是由艦上GPS時間經校頻后獲得,所以利用GPS設備進行標校能夠完成標校設備與被試系統的同步測量。
3.2 目標位置真值計算
由于GPS的坐標系統采用的是WGS-84大地坐標,使用時必須將標校目標的GPS坐標值轉換到以探測系統為原點的站心坐標[5]。下面簡要介紹一下坐標轉換的方法。
首先要將GPS測得的大地坐標轉換為空間大地直角坐標;再將空間大地直角坐標轉換為站心直角坐標;最后再將站心直角坐標轉換為站心球坐標。
大地坐標(B,L,h)轉換為空間大地直角坐標(X,Y,Z)如下
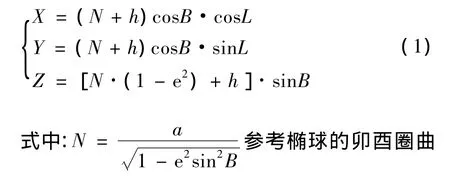

空間大地直角坐標(X,Y,Z)轉換為站心直角坐標(x,y,z)如下

式中:[Xo,Yo,Zo]為站心點的空間大地直角坐標;Bo、Lo為站心點的大地坐標的緯度和經度。
站心直角坐標(x,y,z)轉換為站心球坐標(D,β,ε)
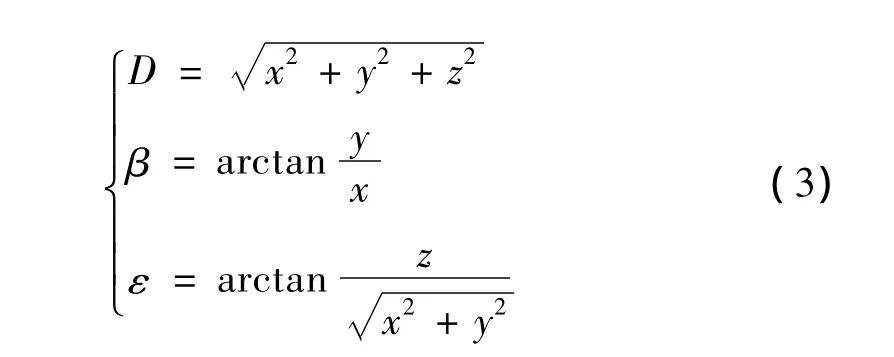
式中:(D,β,ε)為標校目標相對被標探測系統的斜距、方位角和俯仰角。
4 標校中幾個關鍵問題分析
4.1 GPS設備工作方式及精度
對運動目標進行導航定位時,GPS設備采用動態工作方式,對靜止目標進行定位時,GPS設備可采用靜態工作方式,其測量精度更高。標校時載艦系泊于碼頭,處于準靜止狀態,此時GPS設備可采用靜態工作方式以提高標校精度。
按有關標準歸定,標準測量設備的測量精度應優于被標定設備允許誤差的三分之一。如某艦載雷達方位精度0.3°、距離精度60m,則標校設備方位精度應優于0.1°、距離精度應優于20m。近年來由于差分GPS定位精度已經提高到厘米級,通過坐標轉換即可獲得滿足精度的目標真值,所以GPS設備可以作為標準測量設備對探測系統進行標定。
4.2 標校目標的選擇
以往艦載探測系統標校多以海上固定燈樁為標校目標,因燈樁海拔高度較低,很難進行俯仰角標校,所以標校工作多以距離標校、方位角標校為主。利用GPS設備進行標校,電視、紅外等可視探測系統可選擇視距內任意距離、方位、俯仰的固定標的物作為標校目標,通過安裝在標校目標處的GPS設備即可測定標校目標位置。對于雷達、照射器等微波探測系統,可采用氣球或海拔較高的標的物作為標校目標。采用氣球作為標校目標時,通過控制氣球高度即可進行俯仰角標校。
4.3 誤差分析
GPS定位誤差、真值解算誤差和雷達觀測數據誤差是直接影響標校精度的三個主要誤差源。GPS的定位誤差主要有與GPS衛星有關的誤差、與信號傳播有關的誤差和與接收設備有關的誤差,通過利用同步觀測值求差可以消除全部的衛星星歷誤差,消除絕大部分信號傳播誤差和小部分接收設備誤差[6]。真值解算時除幫助消除大部分GPS誤差外,其本身的解算精度相當高,距離和方位誤差分別在10-4和10-5數量級。雷達測量數據通過掃描誤差校正和目標航跡平滑濾波,消除大部分測量噪聲的影響,只有雷達目標中心位置的偏差難以避免,若在理想點目標標校時,以上誤差可以忽略。雷達誤差可控制在較小范圍[7]。
4.4 微波探測系統對GPS接收信號的影響
微波探測系統對近距離的GPS設備接收信號是否有影響,在艦載探測系統標校時,為了更精確地測量探測系統位置,要將GPS設備安裝在距探測系統較近的位置。
GPS衛星采用碼分多址(CDMA)技術在兩個頻率上廣播測距碼和導航數據,也就是說,系統只使用兩個頻率,稱為L1和L2。GPS L1位于指定僅用于其他衛星導航信號的頻段之內。GPS L2位于1215~1240MHz波段,在世界范圍內有各不相同的無線電定位頻率分配,工作于此波段的無線電定位服務包括大量用于空中交通管制、軍事偵察和禁毒的雷達,盡管其中有些雷達工作時發射功率很高(千瓦到兆瓦),但它們都屬于脈沖系統,而GPS接收機在脈沖干擾下是很穩健的[8]。因此,微波探測系統不會對GPS設備接收信號造成影響。
5 誤差計算
對艦載探測系統進行標校時,測量探測系統位置的GPS設備雖然架設在距離探測系統較近的位置,但仍會引入部分系統誤差。通常探測系統與標校目標之間的距離 d0約為10000m,探測系統與GPS設備之間的距離r約為5m,下面將以此為例進行詳細的誤差分析。
5.1 距離誤差分析
探測系統、標校目標、GPS設備形成的位置關系如圖2所示,A點(探測系統)與B點(GPS設備)之間的距離為r,A點(探測系統)與C點(標校目標)之間的距離為d0,B點(GPS設備)與C點(標校目標)之間的距離為di,AC與AB的夾角為α。
根據余弦定理,可得

將d0=10000m、r=5m代入式(4),可得di隨α變化的情況,如圖3所示。

圖3 di與α的函數關系
由圖3可知,當α等于0°時,即標校目標、探測系統、GPS設備在一條直線上且GPS設備位于標校目標與探測系統之間,此時di值最小,等于9995m;當α等于180°時,即標校目標、探測系統、GPS設備在一條直線上且GPS設備在標校目標與探測系統連線的延長線上,此時di值最大,等于10005m。這是兩種極限位置,其余值均在9995~10005m之間。由此可知,因GPS設備架設位置引入的最大距離誤差為5m,小于探測系統允許誤差的三分之一(現有探測系統允許誤差均大于15m),對距離標校的影響很小,可忽略不計。
5.2 方位誤差分析
探測系統、標校目標、GPS設備的方位關系如圖4所示,探測系統測得的目標方位為(∠1+∠α),根據GPS數據計算出的目標方位為(∠2+∠3),根據平行線定理可知∠1=∠2,所以引入方位誤差為:

根據三角形定理,可知

將式(6)代入式(5),得

即方位誤差等于AC與BC的夾角c。

圖4 探測系統、標校目標、GPS設備的方位關系
根據正弦定理,得

將式(4)代入式(8),可得

將d0=10000m、r=5m代入式(9),可得方位誤差c隨α變化的情況,如圖5所示。

圖5 方位誤差與∠α的函數關系
由圖5可以看出,當 α 等于0°、180°或360°時,即標校目標、探測系統、GPS設備在一條直線上時,方位誤差為0°;當α等于90°或270°時,方位誤差最大,約等于0.03°,小于探測系統允許誤差的三分之一(現有探測系統允許誤差均大于0.1°),對方位標校的影響很小,可忽略不計。
5.3 俯仰誤差分析
對艦載探測系統進行標校時,應盡量將GPS設備架設在探測系統回轉中心所在的水平面上,以盡可能減小俯仰誤差。
6 結束語
GPS設備在導航定位領域已應用多年,技術成熟、精度高、操作簡便,現已成為全球重要的定位設備之一。利用GPS高精度定位技術進行艦載探測系統標校,是對GPS技術的深度開發,同時也提高了標校質量、效率,是適應武器系統不斷發展的客觀需求。
[1]毛南平,徐昌慶,張忠華.艦載測控雷達海上無塔標相技術[J].電訊技術,2004,(1):38 -43.
[2]莫錦軍,袁乃昌.SAR校準常用參考目標分析和比較[J].航天返回與遙感,2002,(2):10-16.
[3]Shinada M,Oaku H,et al.,SAR calibration using frequency-tunable active radar calibrators[J].IEEE transactions on geoscience and remote sensing,1999,37(1):564 -573.
[4]姚兆寧.艦載精密測量雷達星體標校方法及應用[J].現代雷達,1999,(4):8 -12.
[5]姚景順,楊世興.艦載雷達的動態標校[J].火力與指揮控制,2008,(3):128 -134.
[6]邊少鋒,李文魁.衛星導航系統概論[M].北京:電子工業出版社,2005,02.
[7]潘紹仁,察豪.基于AIS的艦載雷達標校方法研究[J].艦船科學技術,2009,(6):101-104.
[8]寇艷紅.GPS原理與應用(第二版)[M].北京:電子工業出版社,2007,07.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
