雷達導引頭視線角速度半實物仿真
2013-06-05 13:29:52張江華磨國瑞
火控雷達技術 2013年1期
崔 念 張江華 磨國瑞 荊 濤
(西安電子工程研究所 西安 710100)
1 引言
大型復雜武器系統的研制中,因條件限制不能進行大量的直接試驗,常通過仿真尤其是半實物仿真對系統設計作有效的檢驗。早期檢驗導彈武器性能的方法主要是采用飛行試驗來考核,而考核后又無法回收,因此導彈的半實物仿真就顯得尤為重要[1]。另一方面,由于半實物仿真彌補了數字仿真與外場試驗之間的空檔。它避開了全數字仿真的復雜性和不確定性,提高了仿真的精度和結果的可靠性。同時又具有安全、高效、經濟和可重復使用的特點。所以,一些發達國家在武器的定型試驗過程中,也都采用半實物仿真技術對整個武器系統及其主要部件進行試驗和測試[2]。半實物仿真技術的采用,大大推進了導彈武器系統的研制,減小了開銷,在導彈研制中起著越來越重要的作用。
比例導引律由于自身的高效性和易于實現性被大量地應用于各種導彈的末制導段,而比例導引律的核心即為導彈和目標的視線角速度與控制導彈的指令加速度的大小成比例。因此,彈目視線角速度是比例導引精確末制導導引頭提供的主要制導信息。研究精確末制導雷達導引頭視線角速度的半實物仿真方法,對提高雷達導引頭的研制具有重要的意義。
2 綜合視線法原理
2001年,美國紅石武器中心的Jerry A.Ray等人提出了綜合視線法[3]的概念,即利用轉臺運動模擬彈目相對運動,模擬的視場角范圍實際上僅受限于轉臺轉動范圍,沒有必要象陣列式仿真系統那樣,要求暗室的寬度和高度必須足夠大,從而也可以大大減小仿真系統的成本。綜合視線法與真實視線法進行半實物仿真的對比見圖1。
圖1 綜合視線法與真實視線法對比
圖1中上半部分是真實視線法,目標相對導引頭運動1度,首先是天線轉動1度跟蹤上目標然后再調整彈體姿態,使目標位于彈軸正前方;而在綜合視線法中為了模擬目標相對導引頭1度的角度變化,首先向相反方向轉動轉臺1度,然后天線再產生1度的角度調整,接著調整彈體的姿態,從而使彈軸對準目標。
然而,在綜合視線法的實現過程中,轉動轉臺使目標偏離彈軸方向,對于采用穩定平臺的導引頭來說,由于穩定平臺的存在會自動克服轉臺轉動影響,使天線指向在轉臺轉動過程中保持不變,無法使導引頭象真實視線法那樣輸出視線角速度變化。因此,在對具有穩定平臺的導引頭視線角速度輸出采用綜合視線法進行仿真時,需要對導引頭速度環進行補償以消除穩定回路對模擬目標運動指令的隔離影響,補償后的simulink仿真結果如圖2所示。
圖2 視線角速度輸出對比
圖中曲線1為理想視線角速度,曲線2、3為綜合視線法與真實視線法的視線角速度輸出,可見綜合視線法替代真實視線法具有高度逼真性,能夠滿足實際使用。
3 半實物仿真驗證系統組成
本文采用的是一種低成本雷達導引頭半實物仿真系統[4]。該系統避免了采用微波暗室和目標模擬陣列,因而大幅度降低了仿真系統的建設成本。如圖3所示。
圖3 半實物仿真驗證系統組成
在雷達導引頭發射關閉的狀態下,綜合顯控計算機按導引頭當前的工作模式,通過網絡實時調用信號源與之相應的波形文件。同時實時控制CPLD延時觸發模塊,對輸入給信號源的觸發脈沖進行延時,進而模擬目標距離由遠及近的變化。也就是說當矢量信號源接收到CPLD模塊延時以后的發射觸發信號后,就通過波導激勵頭向外輻射模擬目標回波來完成導引頭目標跟蹤的閉環。
圖4 綜合顯示與控制終端軟件
根據綜合視線法原理,首先通過綜合顯示與控制終端計算機的相應控制,來完成雷達導引頭對模擬目標的搜索、截獲和跟蹤功能。在跟蹤狀態下,綜合顯控計算機實時顯示并記錄所跟蹤目標的距離、速度、角度、角速度等相關信息。固聯于轉臺的慣性測量單元(IMU)實時敏感轉臺方位、俯仰方向的角速度信息,并實時上報給顯控計算機。同時,顯控終端軟件將慣性測量單元(IMU)送來的轉臺角速度信息實時發給雷達導引頭的伺服控制機構,用以補償伺服穩定平臺對轉臺轉動運動的隔離影響。這樣就可以通過轉臺的運動來模擬導彈和目標之間的相對運動,實現和目標運動相同的視線角速度仿真。
4 半實物仿真系統的實驗結果
分別在雷達導引頭置位方式、跟蹤方式以及跟蹤時對轉臺運動的補償方式下,對轉臺施加一隨機干擾運動,用來模擬導彈的彈體擾動,所獲得的轉臺角速度輸出和雷達導引頭角速度輸出如圖5~7所示。
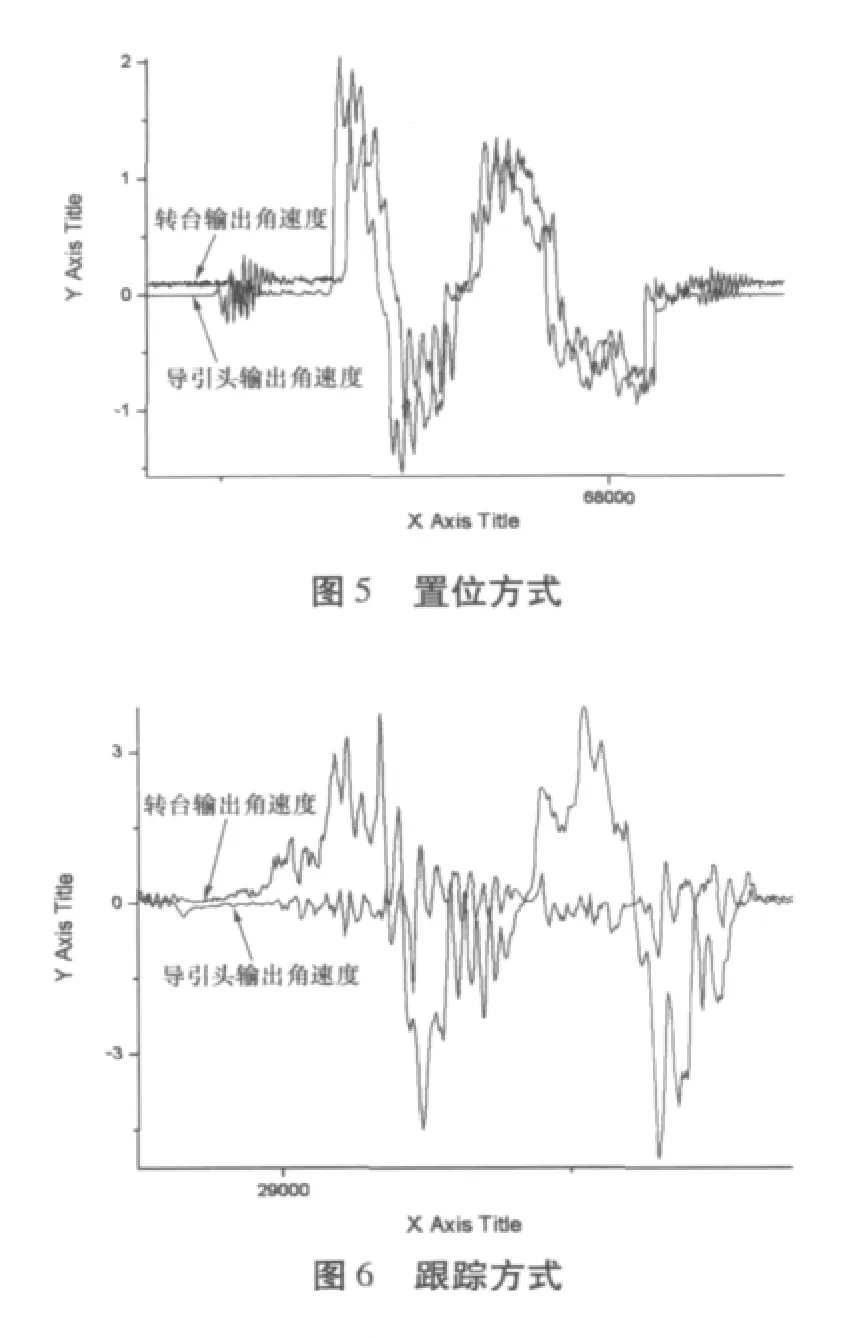
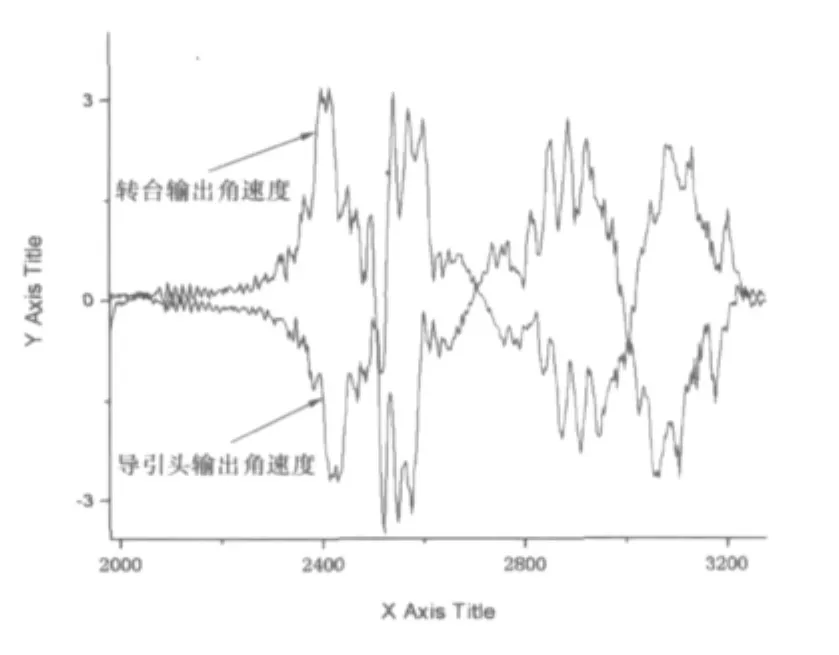
圖7 彈體擾動下跟蹤補償方式
當雷達導引頭工作在置位模式時,導引頭中的伺服系統天線與轉臺相固聯,不會隔離轉臺的隨機擾動。此時,雷達導引頭的伺服天線將隨著轉臺的運動而運動。因此,如圖5所示,所獲得的轉臺輸出角速度與導引頭的輸出角速度基本一致。
當雷達導引頭工作在跟蹤模式時,由于導引頭中的伺服陀螺穩定平臺系統對轉臺的運動起著隔離的作用。因此,轉臺的隨機擾動被伺服穩定平臺隔離掉,導致雷達導引頭輸出的實際視線角速度遠小于轉臺轉動輸出的視線角速度,如圖6所示。
當雷達導引頭工作在跟蹤補償模式時,仿真系統將慣性測量單元(IMU)所敏感的轉臺姿態信息反饋給雷達導引頭的伺服控制系統。用以補償在跟蹤模式下,伺服陀螺穩定平臺對轉臺運動的隔離。因此,可以獲得雷達導引頭在跟蹤補償模式下的轉臺角速度輸出與導引頭視線角速度輸出如圖7所示。可以看出,兩種輸出角速度除僅符號相反外,基本一致。
在雷達導引頭跟蹤補償方式下,為了獲得期望的目標視線角速度輸出,對轉臺施加方向與期望目標運動方向相反的近似正弦運動,用以模擬導彈和目標的相對運動。所獲得的轉臺角速度輸出和雷達導引頭角速度輸出如圖8所示。
從圖8可以看出,在跟蹤補償方式下對轉臺運動隔離補償后,可以實現通過轉臺運動來模擬導彈和目標的相對運動。
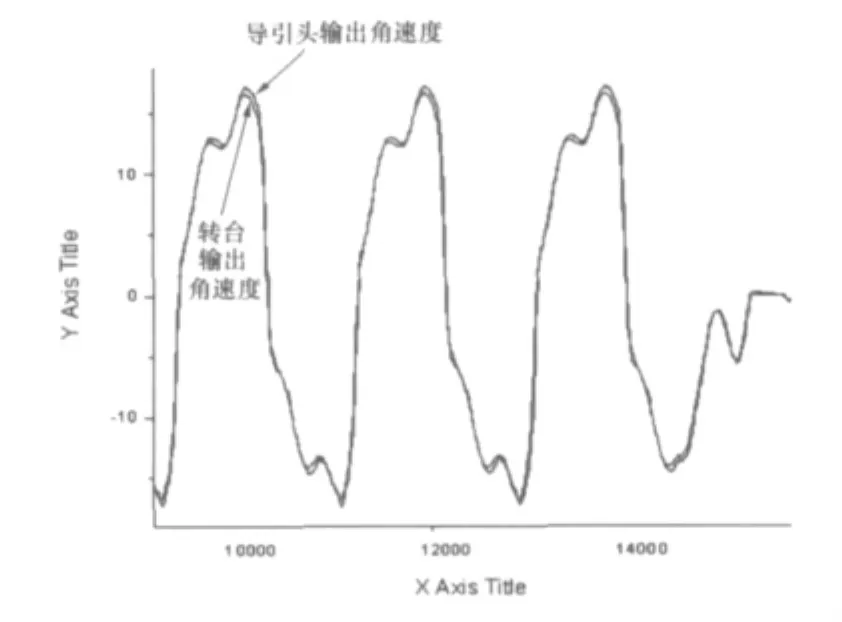
圖8 彈體近似正弦運動跟蹤補償方式
5 結論
從雷達導引頭工作在跟蹤補償模式下的轉臺角速度輸出與導引頭視線角速度輸出曲線比較可得,利用轉臺運動來模擬導彈和目標相對運動的雷達導引頭視線角速度輸出方法可行,且模擬的視場角范圍僅受限于轉臺的轉動范圍。在用該方法來模擬導彈和目標的相對運動時,目標保持不動,使轉臺按照模擬目標運動的相反方向運動,即可獲得所期望的目標運動視線角速度輸出。
[1]曾嫦娥,魚明哲,單長勝,付靜,黃艷俊.美陸軍制導武器試驗半實物仿真技術綜述[J].飛行器測控學報,2004,24(3):75 -83.
[2]安豐增,吳兆欣,王海峰等.雷達型空空導彈半實物仿真系統方案[J].航空兵器,2004,(3):38-40.
[3]Jerry A.Ray,et al.Hardware-in-the-loop Support of the Longbow/Hellfire Modular Missile Systems Pre-Planned Product Improvement Program[C].(4366)SPIE,2001,519 ~527.
[4]習遠望,張江華,高文冀,劉逸平.雷達導引頭低成本半實物仿真系統的應用[J].火控雷達技術,2010,39(1):11 -15.
