Fusion Control Strategy Based on I-Fuzzy-Smith Algorithm for Complex Process with Large Lag
2013-06-02 06:17:26NIYuanmin
機床與液壓 2013年18期
NI Yuanmin
School of Mechanical Engineering,Chongqing Industry Polytechnic College,Chongqing 401120,China
1.Introduction
The complex system is very difficult to build the mathematical model,and therefore it is the puzzle in control engineering,namely the conventional control method,such as PID controller,is incapable of action.For example,the industrial kiln system is difficult to adapt the control of complex system with large lag even using the Smith compensator[1],and the overshoot is still up to 16%.Because fuzzy control does not depend on the accurate mathematical model of system,and the algorithm is easy to implement and etc,therefore it is particularly suitable for complex process control.But there is steady state error by the conventional fuzzy control,the control effect would be worse for large time lag system,coupled with the nonlinear characteristics of the relay,and the system is easy to produce oscillations.The Smith predictive control is considered as one of the most effective control strategy to overcome the large lag process,and its shortcoming is more sensitive to model error.When the model error is large,the control system quality of Smith predictive compensation would be deteriorated,and even loses the stability[2-3].Aimed at the distinguishing feature of the Smith predictive control and fuzzy control,fused the superiorities of Smith predictor control and fuzzy control,and by means of Smith predictor to compensate the fuzzy control,it can be complementary to the control of large lag system.In order to eliminate the steady-state errors,the integrator can be introduced into the complex control system.Based on the above,the paper proposes a fuzzy controller based on the I-Fuzzy-Smith(integral-fuzzy-Smith)fusion.
2.Control puzzle of complex process with large lag
Complex process can be generally decomposed into several subprocess to implement the control ac-cording to some criterion.The performance index of each subprocess is coordinated by the upper decision unit,and after the system integration,it makes overall system achieve optimal state under some significance.But the complex process represents some cybernetics characteristic that is difficult to predict,such as the unknown,time-varying,random and dispersion of process parameters,the time-varying and unknown of process lag time,the serious nonlinearity of process,correlation between the variables of process,the unknown,diversity and randomness of environmental disturbance.Due to the existence of uncertainty in control process,the conventional control strategy is difficult to build the mathematical model for the uncertainty control problem.Because control method is too complex for the highly nonlinear problem,the conventional control strategy is incapable of action.The essence of conventional control is a kind of numerical calculation method,and therefore it is needed for high structured level,but the complex process is mainly the semi-structured and non structured problems.The relationship between the perplexing subprocess is complicated and confused,and it is high coupling and mutual condition among the key factors as well as the external environment is very complex,therefore the conventional control is lack of effective solutions.There is always a contradiction between the robustness and sensitivity using the general control method,and it is possible to cause the entire control system collapse for some condition changes in complex process control.The above characteristics belong to the complex process control problem,and it is difficult to make the effective control by conventional control method for this kind of complex process.So we must explore the more effective control strategy from the angle of cybernetics.
3.Fusion control strategy
The model structure of general negative feedback control system is shown as in Fig.1.In the Fig.1,process deviatione(t)and its change rate as well as time t constitute the information space of solving control problem,and deviatione(t)=r(t)–y(t),r(t)is the process input,u(t)is the controller output,andy(t)is the process output.
In Fig.2,the controller can select the controller that is matched with controlled process characteristic according to the actual process characteristic.The paper proposed a sort of fuzzy control strategy based on Integral-Fuzzy-Smith estimator fusion.It can exert the superiority of Smith predictive control to overcome the puzzle of large lag process control.AssumeW0(s)e-τsto be the transfer function of controlled process with pure lag time,andWc(s)is the transfer function of controller,then the conventional structure of Smith predictive control system is shown as in Fig.2.

Fig.1 Control system with negative feedback

Fig.2 Smith control system structure
In Fig.2,the controller is parallel with a compensation link ofW0(s)(1-e-τs),and the compensation link is called the Smith estimator.The transfer function of the control system can be expressed as the following.

From the expression ofW(s),it can be seen that after compensation it has no pure lag link e-τsin the characteristic equation of the system.Therefore it realizes the complete compensation for the controlled process with pure lag,and it improves the adverse pure lag effects on the control of quality.As for the e-τspure lag in transfer function,it only postpones a time τ for the response curve of control process.
The fuzzy control is independent of accurate process math model,and its algorithm implementation is comparatively simple.The introduced integral link can eliminate the steady deviation and improve the control quality of system.The Smith predictive control can overcome the influence of large lag time.Fused the above superiorities,it is easy to construct simulation model of I-Fuzzy-Smith fusion algorithm.
4.Selection of system simulation model
In the process of industrial production,the model of the most process can be described by process of one-order,two-order,one-order plus lag and two-order plus lag[4].Aimed at the characteristic of being the nonlinearity,large time lag in industrial kiln,here it takes one-order inertia plus pure lag to describe the process,namely the transfer function is as the following.

In which,Kis an amplification coefficient,Tis a time constant of process,andτis a pure lag time.In the actual engineering,the parameter ofK,Tand τ is determined by commonly used step response method.In this paper,the model parameter takes reference[5],and they areK=0.83,T=1680,τ=200,and then the approximate model of controlled process is as below.

Under the condition of Matlab environment,by means of Simulink toolbox it can build simulation model,and make the simulation forcontrolled process under the step input.
5.Simulation research of control algorithm
Here it takes three sorts of the conventional PID controller,fuzzy-Smith controller and I-Fuzzy-Smith controller respectively to control the same controlled process,and the structure of control system is easy to built.In Fig.3,the curve 1 is the output response of controlled process by PID controller,the curve 3 is the output response of controlled process by Fuzzy-Smith controller,and the curve 2 is the output response of controlled process by I-Fuzzy-Smith controller.From Fig.3 it can be seen that PID has 40%overshoot,and the rise time of Fuzzy-Smith control is 3 600 s and there is the existence of 0.5 steady state error,and then the rise time of I-Fuzzy-Smith control is 260 s,no static error and overshoot,and it has a better control quality.
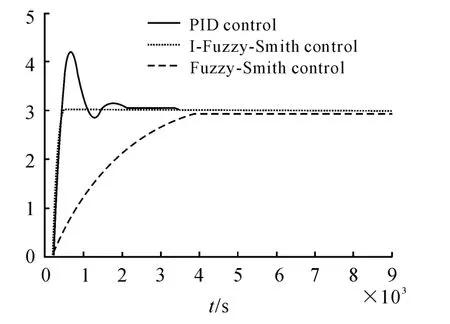
Fig.3 Process response under different controller
5.1.Comparison of anti-jamming performance
The interference has the effects on the performance for control system[6],and Fig.4 is the structure of I-Fuzzy-Smith control chart with disturbance.At the time of 5 500 s,a disturbance of being 2 in step is applied to the output of the I-Fuzzy-Smith controller, and the response of process output is shown as in Fig.5.Similarly the model diagram of available PID control and Fuzzy-Smith control can be obtained.
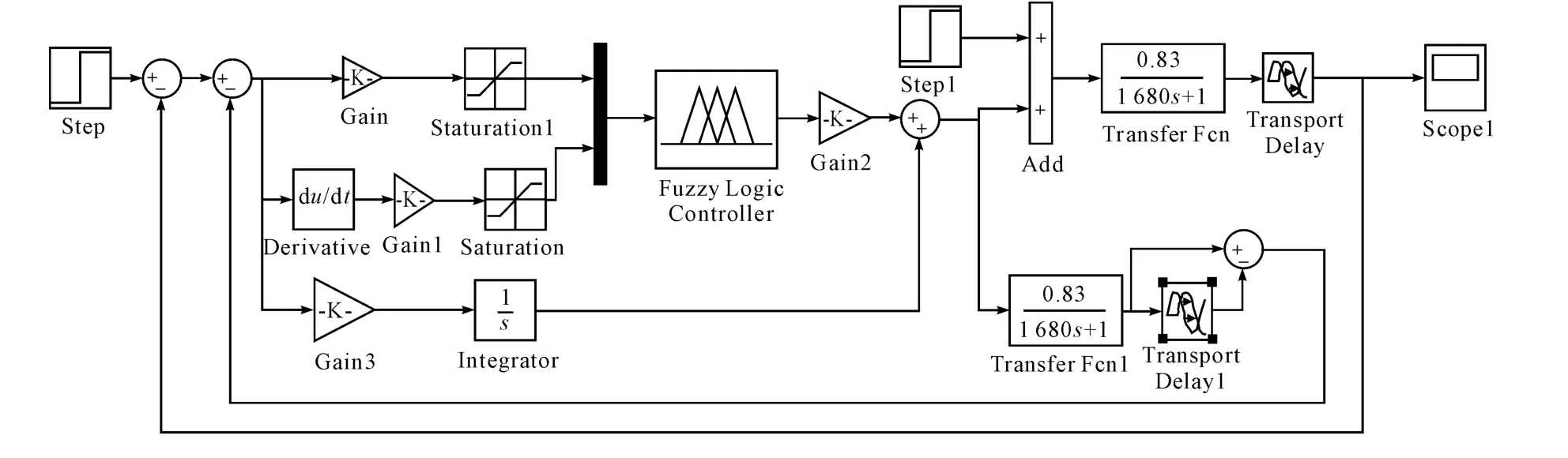
Fig.4 I-Fuzzy-Smith control structure with a disturbance
Shown as in Fig.5,the curve 1 is the response curve of the process by PID control,the curve 2 is the response of the process by I-Fuzzy-Smith control,and the curve 3 is the response of the process by Fuzzy-Smith control.From Fig.5,it can be seen that the I-Fuzzy-Smith control has better anti-disturbance performance.
5.2.Comparison of robustness for change of process parameter
Assume the controlled process to be the temperature,and the parameter of the model is respectivelyK=0.83,T=1 680 s,τ=200 s。
1)The gain change
To change gainKfrom 0.83 to 3,The response curve is shown as in Fig.6,the curve 1 is the process response by PID control,the curve 2 is the process response by I-Fuzzy-Smith control,and the curve 3 is the process response by Fuzzy-Smith control.From Fig.6,it can be seen that the overshoot is reduced from the original 40%to 16.7%by PID,the steady error is reduced from 0.2 to 0 by Fuzzy-Smith control,and the rise time is reduced from 260 s to 230 s by I-Fuzzy-Smith controller.
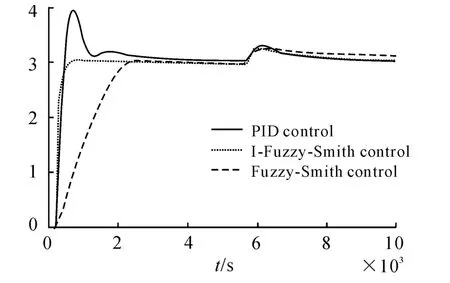
Fig.5 Process response curve with disturbance
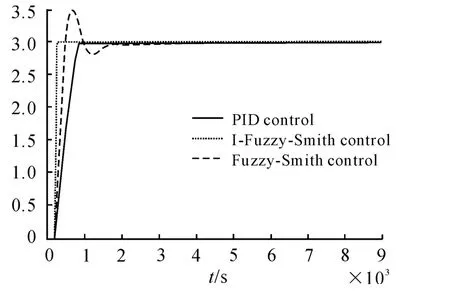
Fig.6 Process response curve changed gain
2)Change for time constant
When T changes from 1 680 s to 1 880 s,the response of the process is shown as in Fig.7.In Fig.7,the curve 1 is the process response by PID control,the curve 2 is the process response by I-Fuzzy-Smith control,and the curve 3 is the process response by Fuzzy-Smith control.From Fig.7,it can be seen that the overshoot is reduced from the original 40%to 33%by PID,the rise rime is increased from 3 600 s to 6 000 s by Fuzzy-Smith control,and it is hardly changed in process response by I-Fuzzy-Smith control,but the rise time is reduced from 260 s to 230 s by I-Fuzzy-Smith controller.
3)Change for pure lag
When the pure lag timeτchanges from 200 s to 400 s,the response of the process is shown as in Fig.8.In the Fig.8,the curve 1 is the process response by PID control,the curve 2 is the process response by I-Fuzzy-Smith control,and the curve 3 is the process response by Fuzzy-Smith control.From Fig.8,it can be seen that the overshoot is reduced from the original 40%to 13%by PID and its steady state error is 0.25,the response of other two algorithms has almost no change,and the response time of 200 s is only postponed.
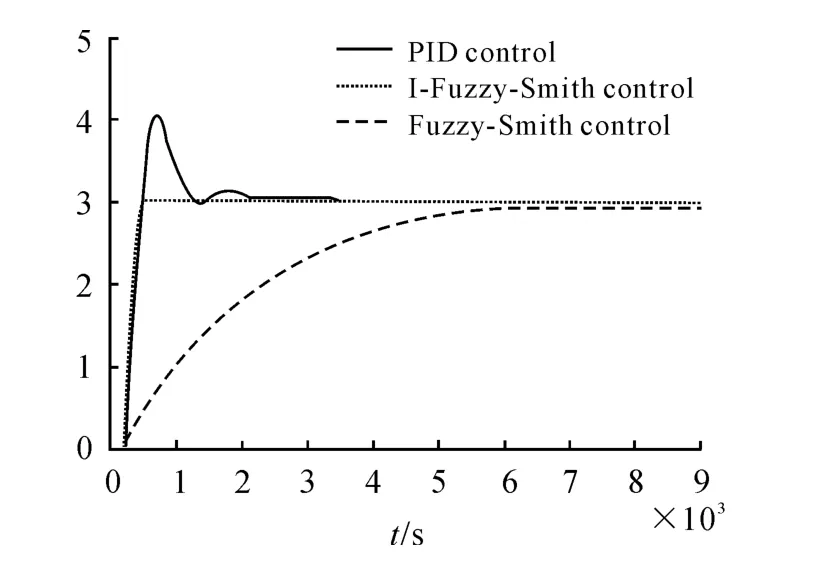
Fig.7 Response curve changed time constant
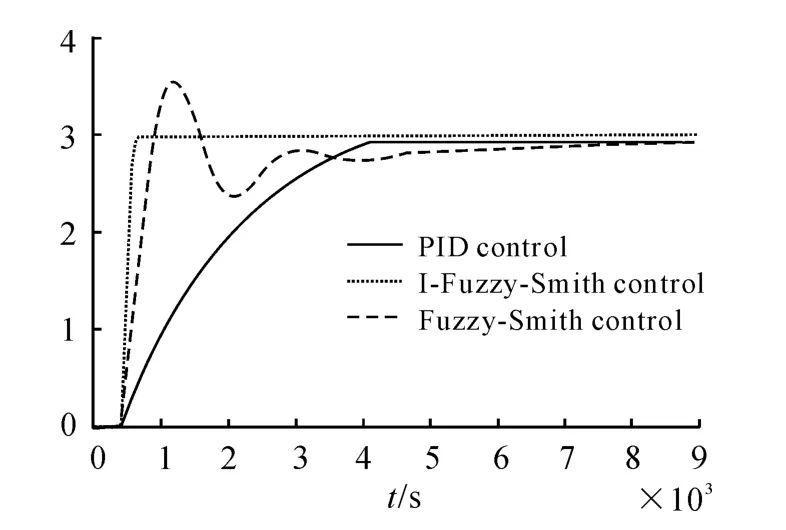
Fig.8 Process response curve changed lag time
4)Increase an inertia link in the original transfer function
An inertia link 1/(10s+1)is added into the original transfer function of controlled process,and the response of controlled process is shown as in Fig.9.In the Fig.9,the curve 1is the process response by PID control,the curve 2 is the process response by IFuzzy-Smith control,and the curve 3 is the process response by I-Fuzzy-Smith control.From Fig.9,it can be seen that the overshoot is increased from the original 40%to 46.7%by PID,the rise time is increased from 3 600 s to 6 000 s by Fuzzy-Smith control,and the overshoot is only appeared 3.3%by IFuzzy-Smith control.
5)Analysis of simulation result
When the process is disturbed,the control by IFuzzy-Smith controller has better anti-interference than respectively by Fuzzy-Smith controller and PID controller.When the parameters of controlled process change,the control by I-Fuzzy-Smith controller has stronger robustness than respectively by Fuzzy-Smith controller and PID controller.
After the gain becomes larger,the rise time and settling time of three kinds of control method is shortened,but response curve of I-Fuzzy-Smith control without steady state error,and the response overshoot is reduced by PID controller.
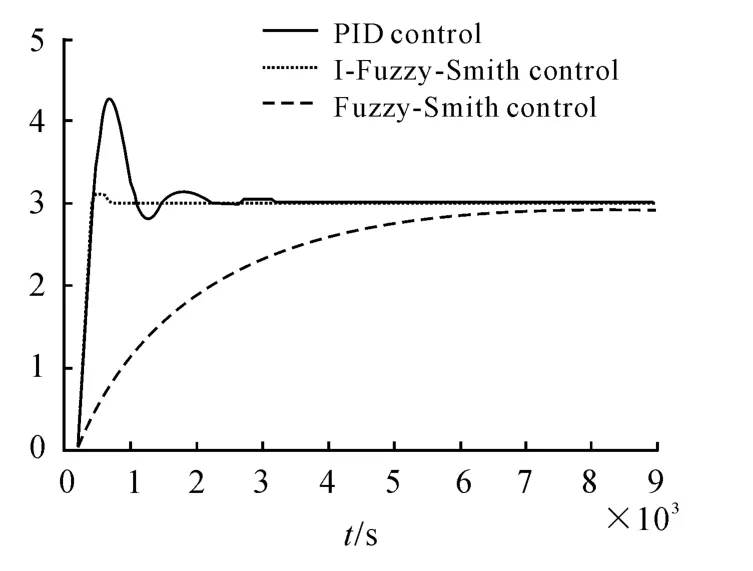
Fig.9 Response curve added an inertia link
After the time constant becomes larger,the response curve of I-Fuzzy-Smith control is hardly changed,the overshoot of response curve is reduced by PID controller,and the rise time of response curve is increased by Fuzzy-Smith controller.
After the pure lag time becomes larger,the response curve of I-Fuzzy-Smith and Fuzzy-Smith control is almost no change,and just in time delay 200 s.The overshoot of response curve is reduced by PID control,but the steady-state error of process becomes larger.
After adding an inertia link,the response curve of I-Fuzzy-Smith control has only a smaller overshoot,the rise time of process response is increased by Fuzzy-Smith control,and there has been a steady state error,and the response curve has an overshoot by PID control.
6.Conclusions
For complex controlled process with the large time lag,the paper put forward a sort of fusion strategy of I-Fuzzy-Smith based control.The simulation results in Matlab show that the controller has the strong adaptability and robustness,and the proposed control strategy has better control effect on the complex process with large time lag.
[1]HU Xuelin.The Application of Digital Regulator in Temperature of Controlling System[J].Chinese Journal of scientific instrument(Suppl.),2003,24(4):565-567.
[2]SUN Xiaofang,CA I Yijun,PAN Haitian,et al.Research on self-adaptive intelligent fuzzy-Smith control for processes with large time-delay[J].Industrial instrumentation and automation device,2008(5):6-9.
[3]LI Xiaopeng,LIU Jiangdu.Design of fuzzy PID controller based on Smith algorithm[J].Microcomputer Information,2009,25(11):66-67.
[4]Bequette W B,Babatunde A O.Chemical Process Control Education and Practice[J].System Theory,2005(3):234-238.
[5]CHANG Wei.Research and design of intelligent control system of Pharmaceutical Workshop moisture and temperature[D].Changsha:Central South University,2008.
[6]PENG Li,LIN Ying,YANG Yi.Exploring on Related Technique in the Control of Complicated System[J].Journal of Southwest China Normal University:Natural Science Edition,2004,29(6):1066-1068.

- 機床與液壓的其它文章
- Detection of Bearing Fault Signal Based on the Wavelet and Chaos Theory
- Development of Vibration Signal Acquisition and Analysis System for Machine Tools Based on LabVIEW
- Vibration Analysis of a Large-size Reduction Gearbox Test System Based on Its Dynamic Characteristics
- Simulation Analysis of PID Optimization of Hydraulic Pressure System Based on Genetic Algorithm
- Design of a State Monitoring and Alarm Device for Escalator
- The CFD Numerical Simulation on Ventilation of Indoor Transformer Substation