魚雷永磁推進電機齒槽力矩分析與抑制
2013-05-28 06:24:20王小雷
水下無人系統學報 2013年2期
王小雷
?
魚雷永磁推進電機齒槽力矩分析與抑制
王小雷
(中國船舶重工集團公司 第705研究所昆明分部, 云南 昆明, 650118)
魚雷永磁推進電機的齒槽力矩是影響力矩脈動的重要因素之一, 對齒槽力矩的產生機理進行了數學解析, 基于極槽數配合法和輔助槽法對齒槽力矩的抑制進行了探討, 建立了不同極/槽數配合電機的2D有限元模型并進行了瞬態仿真, 對不同輔助槽數及其尺寸大小對應的齒槽力矩進行了分析, 結果驗證了相關理論與分析方法的可行性與正確性。
魚雷; 永磁直流電機; 齒槽力矩; 有限元模型
0 引言
永磁電機以其優越的特性在各行各業內被廣泛使用。作為電動力魚雷的推進電機, 永磁無刷直流電機具有重量比功率大、效率高、調速性能好, 可靠性高, 以及免維護等特點, 成為水下航行器電動力推進領域的研究熱點。隨著軍事技術的不斷發展, 世界魚雷發展的總體趨勢是“更快、更遠、更深、更靜”[1], 因此對電動力魚雷推進電機有著較高的要求。永磁推進電機運行時的振動噪聲會對魚雷隱蔽性、聲自導等性能產生影響, 而振動噪聲與電機力矩脈動有著密切關系, 其中齒槽力矩是影響力矩脈動的重要因素之一。
對于永磁電機的齒槽力矩研究已經有了大量文獻。文獻[2]對不同形狀的輔助槽型對齒槽力矩的影響作了分析, 但沒有給出不同輔助槽數量配合對齒槽力矩的影響。文獻[3]~[5]均對永磁電機的齒槽力矩進行了詳細的研究。
本文首先采用解析方法分析了齒槽力矩的產生機理, 然后基于極/槽數配合法與齒冠處開輔助槽法對齒槽力矩的抑制作了探討, 最后建立了魚雷永磁直流推進電機的2D模型, 通過有限元仿真分析, 驗證了相關理論與方法的正確性與有效性。
與普通永磁直流電機不同, 魚雷推進裝置用永磁直流無刷電機一般為對轉結構[6], 即磁系統與電樞系統在電磁力矩的作用下, 兩者反方向對轉。由于齒槽力矩是永磁體與電樞鐵芯的齒槽相互作用產生的, 所以本文在分析計算魚雷推進電機齒槽力矩時, 假定其磁系統靜止, 而電樞系統運動。
1 齒槽力矩脈動數學解析
齒槽力矩一般可分為理想齒槽力矩和非理想齒槽力矩。
理想齒槽力矩是由于永磁電機電樞系統的鐵芯齒槽與磁系統的永磁體相互作用力的切向分量的波動導致的力矩波動, 其表現為試圖將磁系統或者電樞系統定位在某些位置上, 理想齒槽力矩隨著磁系統與電樞系統空間相對位置的變化而作周期性變化, 且其與電樞電流無關。非理想齒槽力矩一般是由磁系統與電樞系統的缺陷造成的, 例如電樞系統偏心, 硅鋼片、磁鋼等材料特性不一致, 以及加工精度造成的。本文的主要研究對象為理想齒槽力矩。
1.1 理想齒槽力矩的產生機理
魚雷推進電機氣隙中的磁場能量為


氣隙磁密可表示為
氣隙體積可表示為
則有

由式(4)可以看出, 永磁推進電機氣隙中儲存的磁場能量與電機結構尺寸、電樞系統與磁系統間的相對位置以及磁鋼性能有關。
如圖1, 磁鋼產生的磁動勢可表示為
圖1 理想齒槽力矩產生機理
Fig. 1 Generation mechanism of ideal cogging torque
由式(5)可得到磁鋼磁動勢的平方值為
由于銅的相對磁導率可近似為1, 即與空氣相同。氣隙磁導又與電樞、磁系統的相對位置有關, 所以氣隙磁導沿切向的表達式僅與電樞系統的齒槽結構相關。
微元圓周角的氣隙磁導可表示為
則有
同時, 一對極極距內的氣隙磁導為
則魚雷永磁直流推進電機齒槽力矩為
由于三角函數具有正交性, 所以可得

2 理想齒槽力矩的抑制
氣隙磁導諧波次數與磁動勢平方值諧波次數可表示為
其中:為電樞槽數;為極對數。
要使=, 即

假設和之間存在一個最大公約數, 則
由式(14)可以得出

綜合以上分析可以得出, 諧波力矩的最低次數為
由式(16)可以看出, 當和的最大公約數越小, 諧波力矩的最低次數越大, 齒槽力矩峰值越小。
3 魚雷推進電機齒槽力矩抑制
3.1 基于槽/極數配合法的齒槽力矩抑制
基于以上分析, 可以通過齒槽配合法來減小槽數和極數2的最大公約數, 以達到對魚雷推進電機齒槽力矩進行抑制的目的, 如表1所示。
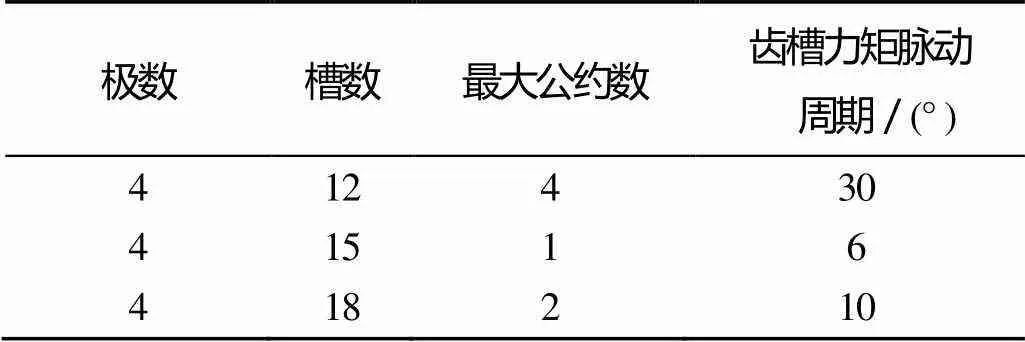
表1 不同槽/極數配合下的齒槽力矩脈動周期
槽/極數配合法較為簡單, 且有效可行, 但是受限于魚雷推進電機的外徑尺寸、齒部機械強度, 以及繞組下線工藝等因素, 槽數不能開得過多。
3.2 基于齒冠處開輔助槽的齒槽力矩抑制
在魚雷推進電機電樞系統的鐵芯齒冠表面增加輔助槽, 類似于增加了槽數, 從而使在電樞系統旋轉360°機械角度內, 齒槽力矩的變化頻率增加。若在齒冠處開取合適數量(一般情況下, 選擇1個或2個)的輔助槽, 可使諧波力矩的最低次數增大, 從而抑制齒槽力矩。
圖2為在齒冠處開1個輔助槽和2個輔助槽的示意圖。

圖2 齒冠處輔助槽
4 有限元仿真及結果分析
由于齒槽力矩與電樞電流無關, 因此本文采用有限元法分析計算魚雷永磁直流無刷推進電機齒槽力矩時, 將電樞繞組截面定義為空氣。
基于以上分析, 首先建立4極12槽、4極15槽、4極18槽的電機模型, 然后對其進行瞬態分析。圖3分別為以上3種極/槽數配合電機的2D有限元模型和瞬態分析得到磁力線分布。
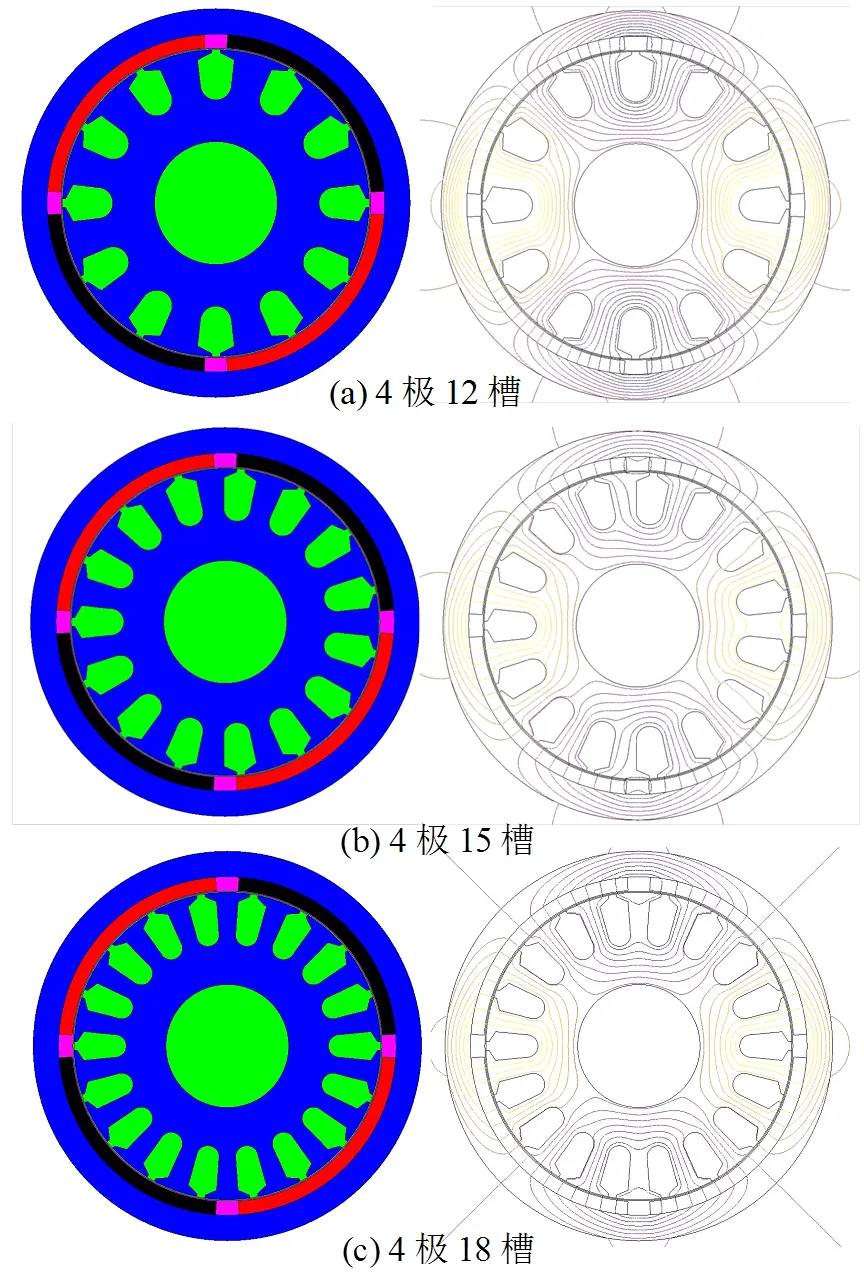
圖3 不同極/槽數配合的永磁電機2D有限元模型與磁力線分布
經過瞬態分析, 得到不同極/槽數配合的電機齒槽力矩曲線, 如圖4所示。從該曲線可以看出, 4極12槽配合下的齒槽力矩峰值為57.9 N·m, 其脈動周期為30°; 4極15槽配合下的齒槽力矩峰值為15.2 N·m, 其脈動周期為6°; 4極18槽配合下的齒槽力矩為23.1 N·m, 其脈動周期為10°, 以上齒槽力矩的脈動周期與理論分析結果相符。
由以上仿真分析結果可以得出, 單一增加電樞系統槽數并不一定能抑制齒槽力矩, 而通過不同的極/槽數配合, 減小極數與槽數的最大公約數在一定程度上可有效抑制齒槽力矩。
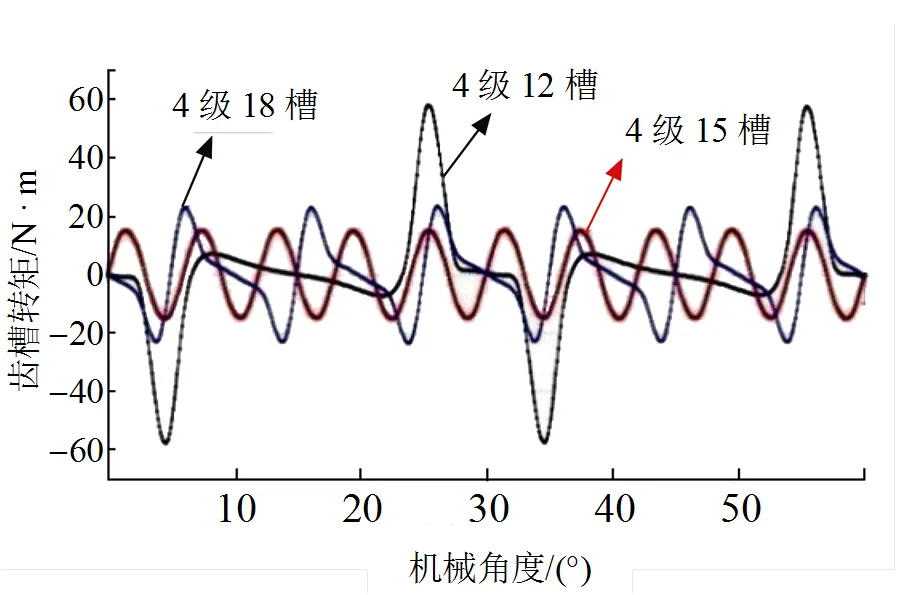
圖4 不同極/槽數配合的永磁電機齒槽力矩
為了驗證基于齒冠處開輔助槽抑制齒槽力矩方法的可行性, 現遵循以齒中心線對稱分布的原則, 對4極12槽電機的齒冠處分別開1個輔助槽和2個輔助槽, 建立有限元模型并對其進行分析, 如圖5所示, 其中通過參數化建模, 將輔助槽的槽深與槽寬定義為變量。

圖5 4極12槽電機不同輔助槽數的磁力線分布
如圖6所示, 當4極12槽電機電樞鐵芯的齒冠處開1個輔助槽時, 電機的齒槽力矩脈動周期從30°變為15°, 但其峰值為60.4 N·m, 相比不開輔助槽時有小幅度增加; 當開2個輔助槽時, 電機的齒槽力矩脈動的機械角度變為10°, 其峰值減小為43 N·m。
為了分析齒冠處輔助槽的尺寸對齒槽力矩的影響, 將輔助槽的槽口寬與槽深作為變量進行有限元分析, 分別得到圖7和圖8, 其中圖7為將輔助槽槽寬設定為主槽寬8 mm時的不同槽深齒槽力矩, 圖8為將輔助槽槽深設定為3 mm時的不同槽寬齒槽力矩。

圖6 4極12槽電機開不同輔助槽數的齒槽力矩
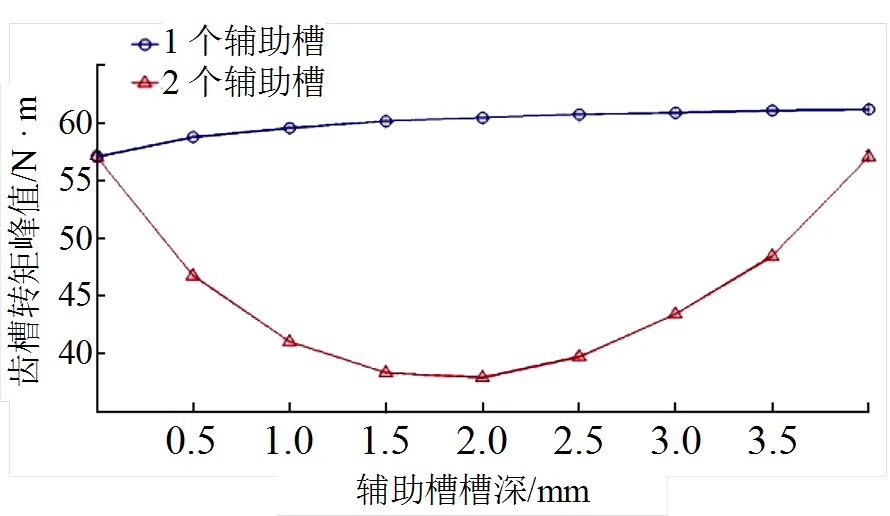
圖7 槽寬為8 mm的不同槽深齒槽力矩

圖8 槽深為3 mm的不同槽寬齒槽力矩
由圖7可以看出, 當4極12槽電機齒冠處開1個輔助槽時, 不同槽深時的齒槽力矩變化不明顯; 當齒冠處開2個輔助槽時, 齒槽力矩先隨著槽深的增加而減小, 然后再增大, 當槽深為2 mm時, 齒槽力矩最小。由圖8可以看出, 當4極12槽電機齒冠處開1個輔助槽時, 齒槽力矩以輔助槽寬等于主槽寬的點為分界點, 先是小幅度增加, 然后迅速變大; 當齒冠處開2個輔助槽時, 齒槽力矩先隨著槽寬變大而減小, 然后再增大, 其中當槽寬等于主槽寬時, 齒槽力矩達到最小值。
由以上仿真分析可以得出, 齒槽力矩的大小由電樞系統的鐵芯齒槽和磁系統的永磁體的磁場互相作用決定, 當齒冠處開一個輔助槽時, 有可能使齒槽力矩在一定幅度上增大, 而當開兩個輔助槽, 齒槽力矩則有一定程度的減小。同時, 由于輔助槽的槽深與槽寬對氣隙磁導諧波與磁動勢平方值諧波有一定程度影響, 故而當輔助槽的槽尺寸為合理值時, 對齒槽力矩有抑制作用, 反之則有可能增加齒槽力矩。
5 結束語
本文對電動力魚雷的永磁直流推進電機齒槽力矩進行了研究, 通過解析計算與仿真分析得到了一些具有工程應用價值的結論。研究表明: 魚雷推進用永磁直流電機的齒槽力矩可通過合理的極/槽數配合和開一定數量輔助槽的方法來抑制, 其中輔助槽的尺寸對齒槽力矩有一定影響。但考慮電樞鐵芯齒冠處機械強度的限制, 電樞系統的槽數與輔助槽數不可能開的太多, 而抑制永磁直流電機齒槽力矩的方法還有分數槽、斜槽, 以及改變極弧系數等方法, 仍有待進一步研究。
[1] 李溢池, 王樹宗.現代魚雷——水下導彈[M].北京: 海洋出版社, 1995.
[2] 夏加寬, 于冰. 定子齒開槽對永磁電機齒槽轉矩的影響[J]. 微電機, 2010, 43(7): 13-16.Xia Jia-kuan, Yu Bing. Influence of Stator Teeth Notching on the Cogging Torque of Permanent Magnet Motor[J]. Micromotors, 2010, 43(7): 13-16.
[3] 王秀和. 永磁電機[M]. 北京: 中國電力出版社, 2010.
[4] 羅宏浩, 廖自力. 永磁電機齒槽轉矩的諧波分析與最小化設計[J]. 電機與控制學報, 2010, 14(4): 36-40, 45. Luo Hong-hao, Liao Zi-li. Hamrmonic Analysis and Minimization of Cogging Torque in Permanent Magnet Motors[J]. Electric Machines and Control, 2010, 14(4): 36-40, 45.
[5] Popescu M, Cistelecan M V, Melcescu L, et al. Low Speed Directly Driven Permanent Magnet Synchronous Generator for Wind Energy Application[J]. IEEE, 2007: 722-795.
[6] 王樹宗. 魚雷動力裝置設計原理(電動力裝置)[M]. 武漢: 海軍工程大學, 1982.
Analysis and Suppression of Cogging Torque of Permanent Magnet Motor for Torpedo Propulsion
WANG Xiao-lei
(Kunming Branch of the 705 Research Institute, China Shipbuilding Industry Corporation, Kunming 650118, China)
The cogging torque of permanent magnet (PM) motor for torpedo propulsion influences the torque ripple. In this paper, the generation mechanism of cogging torque is analyzed mathematically. Based on the pole-slot combination method and the teeth notching method, suppression of the cogging torque is discussed. Two-dimensional finite element models of the PM motor with different pole-slot number are established, transient simulations are performed, and the cogging torques relating to different number and dimension of teeth notches are analyzed. The results verify the feasibility and validity of the proposed theory and analysis method.
torpedo; permanent magnet direct current motor; cogging torque; finite element model
TJ631.2; TM351
A
1673-1948(2013)02-0132-05
2012-08-29;
2013-02-25
王小雷(1986-),男,助理工程師,研究方向為魚雷電動力技術.
(責任編輯: 陳 曦)
